Вам также может понравиться
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11От EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Оценок пока нет
- Dissipative Nonlinear Systems Basic Properties and Stability AnalysisДокумент6 страницDissipative Nonlinear Systems Basic Properties and Stability AnalysisYangОценок пока нет
- A Note On The Stability of Large Scale Systems With DelaysДокумент3 страницыA Note On The Stability of Large Scale Systems With DelaysShafayat AbrarОценок пока нет
- Hyperstability CriterionДокумент4 страницыHyperstability CriterionSyafiul AnamОценок пока нет
- 2002 Papachristodoulou PrajnaДокумент6 страниц2002 Papachristodoulou PrajnaJéssica Cunha PinheiroОценок пока нет
- Feedback Stabilization Via Rational Control Lyapunov FunctionsДокумент6 страницFeedback Stabilization Via Rational Control Lyapunov FunctionsSaeb AmirAhmadi ChomacharОценок пока нет
- Adaptive Control of Linearizable Systems: Fully-StateДокумент9 страницAdaptive Control of Linearizable Systems: Fully-Statedebasishmee5808Оценок пока нет
- Fuzzy LogicДокумент6 страницFuzzy LogicjagadeeshОценок пока нет
- Decoupling in The Design and Synthesis Multivariable Control SystemsДокумент9 страницDecoupling in The Design and Synthesis Multivariable Control SystemsArshad AliОценок пока нет
- Willems - Dissipative Dynamical StructuresДокумент57 страницWillems - Dissipative Dynamical StructuresDoug DaltonОценок пока нет
- Synchronization of Chaotic Systems With Uncertain Parameters by Adaptive ControlДокумент4 страницыSynchronization of Chaotic Systems With Uncertain Parameters by Adaptive Controllaz_chikhi1574Оценок пока нет
- Controllability, Observability, Pole: AllocationДокумент14 страницControllability, Observability, Pole: AllocationSanchez Resendiz BonifacioОценок пока нет
- Principal Component Analysis in Linear Systems Controllability Observability and Model ReductionДокумент16 страницPrincipal Component Analysis in Linear Systems Controllability Observability and Model ReductionElie NicolasОценок пока нет
- Isingmodel PDFДокумент11 страницIsingmodel PDFIsingОценок пока нет
- Observability (Deterministic Systems) and Realization TheoryДокумент20 страницObservability (Deterministic Systems) and Realization TheoryHassanein Al-hadadОценок пока нет
- Principal Component Analysis in Linear Systems Controllability Observability and Model ReductionДокумент16 страницPrincipal Component Analysis in Linear Systems Controllability Observability and Model ReductionNebiyu TenayeОценок пока нет
- Three Steps To ChaosДокумент17 страницThree Steps To ChaosLaura ZúñigaОценок пока нет
- Marquez2016 PDFДокумент6 страницMarquez2016 PDFGeraud Russel Goune ChenguiОценок пока нет
- Stability Analysis of A Class of NonlinearДокумент5 страницStability Analysis of A Class of NonlinearsonabОценок пока нет
- On Passivity Analysis and Passivation of Event-Triggered Feedback Systems Using Passivity IndicesДокумент6 страницOn Passivity Analysis and Passivation of Event-Triggered Feedback Systems Using Passivity IndicesKawthar ZaidanОценок пока нет
- Yip Sincovec 1981Документ6 страницYip Sincovec 1981Kawthar ZaidanОценок пока нет
- Revmodphys 23 253Документ8 страницRevmodphys 23 253walzОценок пока нет
- Clarke 1981Документ11 страницClarke 1981rieriticoОценок пока нет
- Michael J. McCourt, P. J. Antsaklis 2013 Control of Networked Switched SystemsДокумент10 страницMichael J. McCourt, P. J. Antsaklis 2013 Control of Networked Switched SystemsFelix GamarraОценок пока нет
- 1 s2.0 S1474667016433926 MainДокумент6 страниц1 s2.0 S1474667016433926 MainSamir AhmedОценок пока нет
- Panteley2017 PDFДокумент16 страницPanteley2017 PDFJonas OliveiraОценок пока нет
- UKF PaperДокумент5 страницUKF Papertys7524Оценок пока нет
- Partial Feedback Linearization of Underactuated MechanicalДокумент8 страницPartial Feedback Linearization of Underactuated MechanicalSAMY KHARUF GUTIERREZОценок пока нет
- Circuit Analysis in Time DomainДокумент6 страницCircuit Analysis in Time DomainShiva SanthoshОценок пока нет
- C2.papier CDC2008 An S - Regularity Approach To The Robust Analysis of Descriptor ModelsДокумент6 страницC2.papier CDC2008 An S - Regularity Approach To The Robust Analysis of Descriptor ModelsAmineBilal SidSariОценок пока нет
- 10 1002@047134608X W1022 Pub2Документ13 страниц10 1002@047134608X W1022 Pub2Legis FloyenОценок пока нет
- NgoMouelas2019 Article ExtremelyRichDynamicalBehaviorДокумент19 страницNgoMouelas2019 Article ExtremelyRichDynamicalBehaviorAdele Armele Ngo Mouelas Epse LothinОценок пока нет
- HAttractorsДокумент13 страницHAttractorsDaniel Reyes SierraОценок пока нет
- Movellan - 1991 - Contrastive Hebbian Learning in The Continuous Hopfield Model PDFДокумент8 страницMovellan - 1991 - Contrastive Hebbian Learning in The Continuous Hopfield Model PDFhayhk2005Оценок пока нет
- Equilibrium-Independent Dissipativity With Quadratic Supply RatesДокумент15 страницEquilibrium-Independent Dissipativity With Quadratic Supply RatesHamed PourazadОценок пока нет
- A Definition of Passive Linear Networks in Terms of Time and EnergyДокумент6 страницA Definition of Passive Linear Networks in Terms of Time and EnergyfranciscoОценок пока нет
- Nonlinear Dynamic Analysis of Planar Flexible Unde - 2005 - Chinese Journal of AДокумент5 страницNonlinear Dynamic Analysis of Planar Flexible Unde - 2005 - Chinese Journal of ApachterОценок пока нет
- Observador MLPДокумент6 страницObservador MLPCesar BerciОценок пока нет
- Klqgceb Ewvhja SCДокумент8 страницKlqgceb Ewvhja SCAbhishek PaloОценок пока нет
- Upwind MethodДокумент13 страницUpwind MethodSunny KhadkaОценок пока нет
- ExcerptДокумент10 страницExcerptsameinsОценок пока нет
- Zeno Hybrid SystemsДокумент17 страницZeno Hybrid SystemsLe Huy HoangОценок пока нет
- Passivity Verification and Enforcement-A Review Paper: Protap Kumar Mahanta Nuzhat Yamin Ata ZadehgolДокумент16 страницPassivity Verification and Enforcement-A Review Paper: Protap Kumar Mahanta Nuzhat Yamin Ata ZadehgolMahendran CОценок пока нет
- Robust Decentralized Control - A Linear Matrix Inequality (LMI) - Based DesignДокумент5 страницRobust Decentralized Control - A Linear Matrix Inequality (LMI) - Based DesignerpublicationОценок пока нет
- Michael J. McCourt, P. J. Antsaklis 2010 Stability of Networked Passive Switched SystemsДокумент6 страницMichael J. McCourt, P. J. Antsaklis 2010 Stability of Networked Passive Switched SystemsFelix GamarraОценок пока нет
- C022 ObserverSmoothBoundedInput 5thIEEE MedCCS97 PaphosДокумент11 страницC022 ObserverSmoothBoundedInput 5thIEEE MedCCS97 PaphosCostanzo ManesОценок пока нет
- Neurons With Graded Response Have Collective Computational Properties Like Those of Two-State NeuronsДокумент6 страницNeurons With Graded Response Have Collective Computational Properties Like Those of Two-State NeuronskivanaОценок пока нет
- I E E E Conipurer, Pp. 85-94,: OWA Operators. We Can See This Work Very Much in The Spirit ofДокумент8 страницI E E E Conipurer, Pp. 85-94,: OWA Operators. We Can See This Work Very Much in The Spirit ofLuis Fernando Espinoza AudeloОценок пока нет
- Second WriteupДокумент6 страницSecond Writeuprama chaudharyОценок пока нет
- Tac 1976 1101148Документ5 страницTac 1976 1101148Jay Xueji ZhangОценок пока нет
- State-Space Models For Infinite-Dimensional Systems: TestsДокумент8 страницState-Space Models For Infinite-Dimensional Systems: Testspeppas4643Оценок пока нет
- Guaranteed Stability of Haptic Systems With Nonlinear Virtual EnvironmentsДокумент8 страницGuaranteed Stability of Haptic Systems With Nonlinear Virtual Environmentssepehr rasooliОценок пока нет
- Artificial Neural Networks An Econometric PerspectiveДокумент98 страницArtificial Neural Networks An Econometric PerspectiveHector Aguilar TorresОценок пока нет
- Robust Stability Analysis With Integral Quadratic Constraints (IQCs) A Design ExampleДокумент6 страницRobust Stability Analysis With Integral Quadratic Constraints (IQCs) A Design ExampleAlli-Oke Olusegun RazakОценок пока нет
- A Linear Programming Approach To Shipboard Electrical System ModelingДокумент9 страницA Linear Programming Approach To Shipboard Electrical System ModelingShajahan ShagulОценок пока нет
- Controlling Unstable Equilibrium Point Theory For Stability Assessment of Two-Time Scale Power System ModelsДокумент9 страницControlling Unstable Equilibrium Point Theory For Stability Assessment of Two-Time Scale Power System ModelsRony AimaОценок пока нет
- Deterministic Insight Into ANN Model Performance For Storm Runoff SimulationДокумент16 страницDeterministic Insight Into ANN Model Performance For Storm Runoff SimulationDavid JimenezОценок пока нет
- Analysis and Synthesis of Discrete-Time Systems: Sharif University of TechnologyДокумент16 страницAnalysis and Synthesis of Discrete-Time Systems: Sharif University of Technologymadiha mimiОценок пока нет
- Some General Theorems For Non-Linear Systems PossessingДокумент12 страницSome General Theorems For Non-Linear Systems PossessingreddyОценок пока нет
- Fevirgen, IJOCTA Article 1073Документ11 страницFevirgen, IJOCTA Article 1073Roodi AliОценок пока нет
- The Roots of Russell's Paradox: by Gregory H. MooreДокумент6 страницThe Roots of Russell's Paradox: by Gregory H. MooreRafael AcostaОценок пока нет
- V2V Qos Guaranteed Channel Access in Ieee 802.11P Vanets: Che-Yu Chang, Hsu-Chun Yen, and Der-Jiunn Deng, Member, IeeeДокумент13 страницV2V Qos Guaranteed Channel Access in Ieee 802.11P Vanets: Che-Yu Chang, Hsu-Chun Yen, and Der-Jiunn Deng, Member, IeeeRafael AcostaОценок пока нет
- A.panchbhail, S. Parmar, THD Comparison For Power Quality (MATLAB Simulation & HardwareДокумент4 страницыA.panchbhail, S. Parmar, THD Comparison For Power Quality (MATLAB Simulation & HardwareRafael AcostaОценок пока нет
- PowerNap A Power-Aware DistributedДокумент14 страницPowerNap A Power-Aware DistributedRafael AcostaОценок пока нет
- Chap10 1473751047 598108Документ38 страницChap10 1473751047 598108Yuuki AsunaОценок пока нет
- Homework 3 (Due Wednesday, September 4th)Документ4 страницыHomework 3 (Due Wednesday, September 4th)ArnumSaryKhoirunnizaОценок пока нет
- Perancangan Sistem Informasi Manajemen Persediaan (Studi Kasus: Pdam Tirta Sakti Kabupaten Kerinci)Документ14 страницPerancangan Sistem Informasi Manajemen Persediaan (Studi Kasus: Pdam Tirta Sakti Kabupaten Kerinci)Peter WenОценок пока нет
- 02 Automatic Control System Linearization PDFДокумент37 страниц02 Automatic Control System Linearization PDFBolWolОценок пока нет
- ISO ProcessДокумент1 страницаISO ProcessMukesh Patidar100% (2)
- Digital Twin Driven Additive ManufactureДокумент26 страницDigital Twin Driven Additive ManufactureNursultan JyeniskhanОценок пока нет
- CS 4650/7650: Natural Language Processing: Neural Text ClassificationДокумент85 страницCS 4650/7650: Natural Language Processing: Neural Text ClassificationRahul GautamОценок пока нет
- Viable System Model - PPTДокумент22 страницыViable System Model - PPTtiyachОценок пока нет
- Social Administration by Harleigh TreckerДокумент56 страницSocial Administration by Harleigh TreckerGlennieMarieSina-on80% (5)
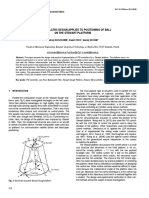
- Pid Controllers Design Applied To Positioning of BallДокумент5 страницPid Controllers Design Applied To Positioning of BallEdsonAlvesОценок пока нет
- Design and Process FMEA TemplateДокумент4 страницыDesign and Process FMEA TemplateKrunal PandyaОценок пока нет
- BIS 09 Project ManagementДокумент32 страницыBIS 09 Project ManagementHamis Rabiam Magunda0% (1)
- CCS341 Set1Документ2 страницыCCS341 Set1Anonymous SwS8ipxbd100% (1)
- Clapeyron EquationДокумент12 страницClapeyron EquationAhmed AlhinaiОценок пока нет
- CH 5Документ56 страницCH 5Mintesinot KasaОценок пока нет
- Dynamic Simulation of Heat Transfer Through Cooling TowerДокумент5 страницDynamic Simulation of Heat Transfer Through Cooling TowerAparnaОценок пока нет
- 1, Chapter 3 - Organizational EffectivenessДокумент24 страницы1, Chapter 3 - Organizational EffectivenessBushra Mubeen SiddiquiОценок пока нет
- Lect-5-Maintenance TypesДокумент19 страницLect-5-Maintenance TypesRОценок пока нет
- Gantt Chart WedifyДокумент1 страницаGantt Chart Wedifyriyaa.jha29Оценок пока нет
- NDT Test Report NTP PDFДокумент6 страницNDT Test Report NTP PDFwawan kusnandar100% (1)
- ANN - WikiДокумент39 страницANN - Wikirudy_tanagaОценок пока нет
- Software Testing by Yogesh KhairnarДокумент13 страницSoftware Testing by Yogesh KhairnarYOGESH KHAIRNARОценок пока нет
- Project Test Plan - IPAДокумент5 страницProject Test Plan - IPAobada_shОценок пока нет
- CONTOH Course Outline SPДокумент6 страницCONTOH Course Outline SPMohamad Nadzri YahayaОценок пока нет
- CC102 Lesson IV - Software Development Lifecycle (SDLC)Документ11 страницCC102 Lesson IV - Software Development Lifecycle (SDLC)Mark Jerome AlbanoОценок пока нет
- Quality Assurance and QA PlansДокумент13 страницQuality Assurance and QA PlansAKHIL JOSEPH100% (1)
- 1989 Computing and Chemical EngineeringДокумент10 страниц1989 Computing and Chemical EngineeringFahad TariqОценок пока нет
- Epoch-Modeling and Simulation of An AllДокумент40 страницEpoch-Modeling and Simulation of An Allraducu2009Оценок пока нет
- Paper 3C1 Examples Sheet 8: Control Systems: David Corrigan 2011Документ3 страницыPaper 3C1 Examples Sheet 8: Control Systems: David Corrigan 2011Armando MaloneОценок пока нет
- Extended State Estimator Based Two Area Load Frequency ControlДокумент7 страницExtended State Estimator Based Two Area Load Frequency ControlParamjit SahaОценок пока нет
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeОт EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeРейтинг: 4 из 5 звезд4/5 (2)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)От EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Оценок пока нет
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsОт EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsРейтинг: 4.5 из 5 звезд4.5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormОт EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormРейтинг: 5 из 5 звезд5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.От EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Рейтинг: 5 из 5 звезд5/5 (1)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryОт EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryОценок пока нет
- Calculus Workbook For Dummies with Online PracticeОт EverandCalculus Workbook For Dummies with Online PracticeРейтинг: 3.5 из 5 звезд3.5/5 (8)
- Mental Math Secrets - How To Be a Human CalculatorОт EverandMental Math Secrets - How To Be a Human CalculatorРейтинг: 5 из 5 звезд5/5 (3)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)От EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Оценок пока нет
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingОт EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingРейтинг: 4.5 из 5 звезд4.5/5 (21)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathОт EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathРейтинг: 5 из 5 звезд5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsОт EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsРейтинг: 3.5 из 5 звезд3.5/5 (9)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldОт EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldРейтинг: 3 из 5 звезд3/5 (80)