Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- GeomeasureДокумент14 страницGeomeasureDebasisMohapatraОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Nature of Soil-Water Characteristics Curves (SWCC) For Soils From Anbar GovernorateДокумент21 страницаNature of Soil-Water Characteristics Curves (SWCC) For Soils From Anbar GovernorateDebasisMohapatraОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Tunnel IДокумент13 страницTunnel IDebasisMohapatraОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Jgeot 18 P 103-1Документ15 страницJgeot 18 P 103-1DebasisMohapatraОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Uusci 2009 007Документ194 страницыUusci 2009 007DebasisMohapatraОценок пока нет
- An Improved Contact Algorithm For The Material PoiДокумент15 страницAn Improved Contact Algorithm For The Material PoiDebasisMohapatraОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- TR322Документ15 страницTR322DebasisMohapatraОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Figure 2Документ1 страницаFigure 2DebasisMohapatraОценок пока нет
- Ns FEM LIUДокумент14 страницNs FEM LIUDebasisMohapatraОценок пока нет
- Figure 2Документ1 страницаFigure 2DebasisMohapatraОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
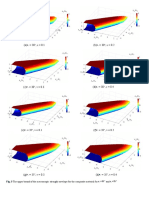
- S C S C: Fig. 5 The Cross-Sectional View of The Macroscopic Strength Envelope For The Composite MaterialДокумент1 страницаS C S C: Fig. 5 The Cross-Sectional View of The Macroscopic Strength Envelope For The Composite MaterialDebasisMohapatraОценок пока нет
- S C S C: Fig. 3 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForДокумент1 страницаS C S C: Fig. 3 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForDebasisMohapatraОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Soga - Critical StateДокумент13 страницSoga - Critical StateDebasisMohapatraОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Fig. 1. (A) Initial 3D Problem (B) Homogenized 2D ProblemДокумент1 страницаFig. 1. (A) Initial 3D Problem (B) Homogenized 2D ProblemDebasisMohapatraОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- S C S C: Fig. 4 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForДокумент1 страницаS C S C: Fig. 4 The Upper Bound of The Macroscopic Strength Envelope For The Composite Material ForDebasisMohapatraОценок пока нет
- Computers and Geotechnics: Research PaperДокумент15 страницComputers and Geotechnics: Research PaperDebasisMohapatraОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Fig. 1 (A) Initial 3D Problem (B) Homogenized 2D ProblemДокумент1 страницаFig. 1 (A) Initial 3D Problem (B) Homogenized 2D ProblemDebasisMohapatraОценок пока нет
- Accent Training: - Neutralization - American - British 30 HrsДокумент1 страницаAccent Training: - Neutralization - American - British 30 HrsShah PatelОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Mathematics KeyДокумент353 страницыMathematics KeyDebasisMohapatra100% (3)
- Smoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsДокумент39 страницSmoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsDebasisMohapatraОценок пока нет
- Fulltext01 Matlab Code For Elasticity y Plasticity PDFДокумент115 страницFulltext01 Matlab Code For Elasticity y Plasticity PDFRory Cristian Cordero RojoОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- 1 s2.0 S MainДокумент14 страниц1 s2.0 S MainDebasisMohapatraОценок пока нет
- Smoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsДокумент39 страницSmoothed Finite Element Methods (S-FEM) : An Overview and Recent DevelopmentsDebasisMohapatraОценок пока нет
- Earthquake EN PDFДокумент128 страницEarthquake EN PDFDebasisMohapatraОценок пока нет
- Introduction To Mesh in MatlabДокумент18 страницIntroduction To Mesh in MatlablinoОценок пока нет
- Yu1994 Quadratic Element UpperbndДокумент20 страницYu1994 Quadratic Element UpperbndDebasisMohapatraОценок пока нет
- Lect2 LPSDP3Документ31 страницаLect2 LPSDP3DebasisMohapatraОценок пока нет
- MIT Ub SOCPДокумент111 страницMIT Ub SOCPDebasisMohapatraОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Lower Bound Limit Analysis Using Finite Elements and Linear OptimizationДокумент23 страницыLower Bound Limit Analysis Using Finite Elements and Linear OptimizationDebasisMohapatraОценок пока нет
- Mitsubishi Electric Industrial Robots: Communication Middleware (Melfarxm - Ocx) Instruction ManualДокумент152 страницыMitsubishi Electric Industrial Robots: Communication Middleware (Melfarxm - Ocx) Instruction ManualRafael GagoОценок пока нет
- NEMA Premium CatalogДокумент38 страницNEMA Premium CatalogPedro SanchezОценок пока нет
- Injection Molding TrainingДокумент131 страницаInjection Molding TrainingNuria Varela100% (3)
- 01 40 00 - Quality RequirementsДокумент27 страниц01 40 00 - Quality RequirementsshauhramОценок пока нет
- American University of Beirut Aub Thesis TemplateДокумент12 страницAmerican University of Beirut Aub Thesis TemplateHassane EzzeddineОценок пока нет
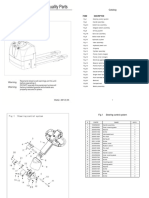
- Catalog: Ningbo Liftstar Material Handling Equipment Co., LTDДокумент27 страницCatalog: Ningbo Liftstar Material Handling Equipment Co., LTDKiều Văn TrungОценок пока нет
- A Study of Chemical Structure of Soft and Hardwood andДокумент7 страницA Study of Chemical Structure of Soft and Hardwood andBruna BarraОценок пока нет
- Mooring SystemsДокумент6 страницMooring SystemsVinicius PessottiОценок пока нет
- Literature ReviewДокумент2 страницыLiterature ReviewkhairulОценок пока нет
- Training CoursesДокумент16 страницTraining CoursesFeroz KhanОценок пока нет
- Survey MODULE 4Документ16 страницSurvey MODULE 4InsurrectionОценок пока нет
- Excel 2010 Cheatsheet PDFДокумент2 страницыExcel 2010 Cheatsheet PDFVinith VimalОценок пока нет
- Catapult Ref ManДокумент372 страницыCatapult Ref ManBiplab RoyОценок пока нет
- SM 121 PDFДокумент573 страницыSM 121 PDFEnrique Arevalo LeyvaОценок пока нет
- Catálogo EC200DДокумент912 страницCatálogo EC200DCasa da Madeira100% (1)
- OE Spec MTU16V4000DS2250 3F FC 50Hz 1 14Документ6 страницOE Spec MTU16V4000DS2250 3F FC 50Hz 1 14YasirSwatiОценок пока нет
- BCM NotesДокумент25 страницBCM NotesAman AgrawalОценок пока нет
- Steering Wheel Slip - Check: Pruebas y AjustesДокумент2 страницыSteering Wheel Slip - Check: Pruebas y AjustesLENIN JHAIR VALDERRAMA SEGURAОценок пока нет
- Flextronics FINALДокумент25 страницFlextronics FINALAnkit GauravОценок пока нет
- Denon CD Player C680Документ2 страницыDenon CD Player C680Mujeeb SiddiquiОценок пока нет
- Nust Entrance TestДокумент16 страницNust Entrance TestShawn Parker80% (30)
- Yousif Alotaibi 01 CVДокумент3 страницыYousif Alotaibi 01 CVyousefx20Оценок пока нет
- Data SheetДокумент5 страницData Sheetsongtu2552Оценок пока нет
- CV Mayank Shekhar Dwivedi IITBДокумент4 страницыCV Mayank Shekhar Dwivedi IITBGoutam GiriОценок пока нет
- CFPA E Guideline No 19 2009 EVACUATION FROM BUILDINGS PDFДокумент99 страницCFPA E Guideline No 19 2009 EVACUATION FROM BUILDINGS PDFodemircioglu2Оценок пока нет
- Bolts TheoryДокумент30 страницBolts TheoryIbrahim Mesfin100% (1)
- SEPARATION THEORY - From Basic Separation To ALCAP SystemДокумент42 страницыSEPARATION THEORY - From Basic Separation To ALCAP SystemmgbouneОценок пока нет
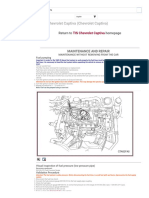
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Документ57 страницChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)
- IEC Systems Manual - SCRДокумент102 страницыIEC Systems Manual - SCRgabriel100% (3)
- SNO-I-DS-001 - 0 Instrument Data Sheet For Shutdown and Blowdown Valves (Revise)Документ174 страницыSNO-I-DS-001 - 0 Instrument Data Sheet For Shutdown and Blowdown Valves (Revise)ono_czeОценок пока нет
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresОт EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresРейтинг: 1 из 5 звезд1/5 (2)
- To Engineer Is Human: The Role of Failure in Successful DesignОт EverandTo Engineer Is Human: The Role of Failure in Successful DesignРейтинг: 4 из 5 звезд4/5 (138)