Вам также может понравиться
- Me146-2 Vibration Engineering Review QuestionsДокумент5 страницMe146-2 Vibration Engineering Review QuestionsCount AechОценок пока нет
- Traditional Music of AfricaДокумент12 страницTraditional Music of AfricaAlbert Ian Casuga100% (1)
- James Morrison You Make It Real Piano Sheet Music FreeДокумент3 страницыJames Morrison You Make It Real Piano Sheet Music FreeKai Wikeley0% (1)
- Himmel E-Catalogue: Sample Purpose OnlyДокумент28 страницHimmel E-Catalogue: Sample Purpose OnlyX Hamayu BawonoОценок пока нет
- Dynamic Loadings On Pedestrian BridgesДокумент14 страницDynamic Loadings On Pedestrian BridgesRoy JariОценок пока нет
- Background Document For Floor VibrationsДокумент19 страницBackground Document For Floor VibrationsLanzhuoОценок пока нет
- Some Relevant Aspects of Footbridge Vibrations: Facta UniversitatisДокумент9 страницSome Relevant Aspects of Footbridge Vibrations: Facta UniversitatisLester Neil LomodОценок пока нет
- Vibration FundamentalsДокумент5 страницVibration FundamentalsVineesh VsОценок пока нет
- Vibration IsolatorsДокумент27 страницVibration Isolatorssachidananda basaral100% (2)
- Regw PDFДокумент66 страницRegw PDFVikas TomarОценок пока нет
- General Vibration Concepts For The End-User: by TMI Staff & Contributors On September 22, 2018Документ2 страницыGeneral Vibration Concepts For The End-User: by TMI Staff & Contributors On September 22, 2018munro_85Оценок пока нет
- Footbridge Response On Single Pedestrian Induced Vibration AnalysisДокумент12 страницFootbridge Response On Single Pedestrian Induced Vibration AnalysisYoshua YangОценок пока нет
- IDW09 Brownjohn PDFДокумент24 страницыIDW09 Brownjohn PDFAntnio5Оценок пока нет
- Appendix III Dynamic Assessment of The Floor System: Acceptable Accelerations For Different OccupanciesДокумент6 страницAppendix III Dynamic Assessment of The Floor System: Acceptable Accelerations For Different OccupanciesEEPОценок пока нет
- Synchronic Excitation in Footbridges Due Human-Induced Forces in Lima PeruДокумент9 страницSynchronic Excitation in Footbridges Due Human-Induced Forces in Lima PeruYury Erick Rosales LeónОценок пока нет
- European Design Guide For Footbridge Vibration: Christoph HEINEMEYER Markus FELDMANNДокумент14 страницEuropean Design Guide For Footbridge Vibration: Christoph HEINEMEYER Markus FELDMANNAbdullah NajjarОценок пока нет
- DefinitionsДокумент2 страницыDefinitionsnatraj26Оценок пока нет
- Reg WДокумент66 страницReg WCeline ColeОценок пока нет
- Notes - Topic 13 Oscillations - CAIE Physics A-LevelДокумент6 страницNotes - Topic 13 Oscillations - CAIE Physics A-LevelKen OtooОценок пока нет
- A Review of Design of Shock Absorber Test RigДокумент5 страницA Review of Design of Shock Absorber Test Rigrahul.yerrawarОценок пока нет
- Vibration and Shock IsolationДокумент3 страницыVibration and Shock IsolationSaravanan.KОценок пока нет
- European Design Guide For Footbridge Vibration: ArticleДокумент15 страницEuropean Design Guide For Footbridge Vibration: ArticleAndoОценок пока нет
- Free Vibration: Presented by Tuan Mohd Hafeez Bin Tuan IbrahimДокумент56 страницFree Vibration: Presented by Tuan Mohd Hafeez Bin Tuan IbrahimhamryОценок пока нет
- Issues of Vibrations in Footbridges by Mahesh TandonДокумент17 страницIssues of Vibrations in Footbridges by Mahesh TandonAnonymous YHcvra8Xw6Оценок пока нет
- 15.7: Forced Oscillations: Learning ObjectivesДокумент4 страницы15.7: Forced Oscillations: Learning ObjectivesSURESH SURAGANIОценок пока нет
- Estudio de Vibraciones-Idw01 - HeinmeyerДокумент0 страницEstudio de Vibraciones-Idw01 - HeinmeyerAgustín AramayoОценок пока нет
- Vibration - Wikipedia, The Free EncyclopediaДокумент7 страницVibration - Wikipedia, The Free Encyclopediadidodido_67Оценок пока нет
- VibrationДокумент15 страницVibrationYusman EkaОценок пока нет
- 02 Introduction To Shock and VibrationДокумент34 страницы02 Introduction To Shock and Vibrationkostarica123100% (1)
- Phys203 Ch13Документ32 страницыPhys203 Ch13Luis PedreroОценок пока нет
- Vibrasi AnalisisДокумент72 страницыVibrasi AnalisisyogacruiseОценок пока нет
- Critical Speed PDFДокумент10 страницCritical Speed PDFParamasivam VeerappanОценок пока нет
- Workshop 2Документ149 страницWorkshop 2JOEL JO THOMASОценок пока нет
- Sediment Transport - Zhou LiuДокумент75 страницSediment Transport - Zhou LiuRahman To RicoОценок пока нет
- Modeling of Vibratory Pile DrivingДокумент12 страницModeling of Vibratory Pile DrivingAlberto AguilarОценок пока нет
- 1.0 FUNDAMENTALS of VIBRATION 1.1 What Is Vibration? Mechanical VibrationДокумент56 страниц1.0 FUNDAMENTALS of VIBRATION 1.1 What Is Vibration? Mechanical VibrationLuis Balducci100% (1)
- L21 Train-Track Interaction 2020Документ35 страницL21 Train-Track Interaction 2020Carlos Andres Pinzon LoaizaОценок пока нет
- Low Dimensional Description of Pedestrian-Induced Oscillation of The Millennium BridgeДокумент18 страницLow Dimensional Description of Pedestrian-Induced Oscillation of The Millennium Bridgebursuc2Оценок пока нет
- 6 Displacement, Velocity, and AccelerationДокумент2 страницы6 Displacement, Velocity, and AccelerationInfo -Baseline TechnologiesОценок пока нет
- Accelerometers Versus Velocity Sensors - What's The Difference 2Документ1 страницаAccelerometers Versus Velocity Sensors - What's The Difference 2Nelson Arul NathanОценок пока нет
- Basics of Dynamics and Aseismic DesignДокумент24 страницыBasics of Dynamics and Aseismic DesignVennila GОценок пока нет
- Forced VibrationsДокумент17 страницForced Vibrationssuhas110Оценок пока нет
- Unit 3&4 VibrationДокумент4 страницыUnit 3&4 VibrationSudipta NathОценок пока нет
- Sdof VibrationДокумент59 страницSdof Vibrationevo2005_2006Оценок пока нет
- VibrationДокумент63 страницыVibrationSiva Kumar Tutika100% (6)
- Ch.1 Fundamentals of VibrationsДокумент30 страницCh.1 Fundamentals of VibrationsMohamed HassanОценок пока нет
- How Do Waves Behave? How Are They Measured? Physics Lessons for Kids | Children's Physics BooksОт EverandHow Do Waves Behave? How Are They Measured? Physics Lessons for Kids | Children's Physics BooksОценок пока нет
- Dynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldОт EverandDynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldОценок пока нет
- Solutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsОт EverandSolutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsОценок пока нет
- Maxwell's Equations and the Principles of Electromagnetic PhenomenaОт EverandMaxwell's Equations and the Principles of Electromagnetic PhenomenaОценок пока нет
- The Fast Track to Understanding Ham Radio PropagationОт EverandThe Fast Track to Understanding Ham Radio PropagationОценок пока нет
- Mechanical Vibrations - Theory And Application - An Introduction To Practical Dynamic Engineering Problems In The Structural FieldОт EverandMechanical Vibrations - Theory And Application - An Introduction To Practical Dynamic Engineering Problems In The Structural FieldОценок пока нет
- Factors Affecting Selection of FoundationДокумент4 страницыFactors Affecting Selection of FoundationRoy JariОценок пока нет
- ICSSL Auckland 2018 - 20th International Conference On Slope Stability and LandslidesДокумент2 страницыICSSL Auckland 2018 - 20th International Conference On Slope Stability and LandslidesRoy JariОценок пока нет
- 2017 San Francisco Call Flyer RevisedДокумент2 страницы2017 San Francisco Call Flyer RevisedRoy JariОценок пока нет
- WKS 4 Excavations Excavation Safety Guide PDFДокумент84 страницыWKS 4 Excavations Excavation Safety Guide PDFAbinesh ABОценок пока нет
- Geo Risk 2017 Preliminary ProgramДокумент8 страницGeo Risk 2017 Preliminary ProgramRoy JariОценок пока нет
- W2 Timber Framed BuildingДокумент16 страницW2 Timber Framed BuildingRoy JariОценок пока нет
- Useful Features in ExcelДокумент36 страницUseful Features in ExcelRoy JariОценок пока нет
- Haines, John Troubadors TrouveresДокумент361 страницаHaines, John Troubadors Trouveresjuliobarbo100% (4)
- Stravinsky Soldiers Tale Program Notes1Документ4 страницыStravinsky Soldiers Tale Program Notes1Matt GriffithОценок пока нет
- The Roaring TwentiesДокумент17 страницThe Roaring TwentiesAlexandraNicoarăОценок пока нет
- Atg Quiz ReflexpronДокумент2 страницыAtg Quiz Reflexpronbrotherbeyond1975Оценок пока нет
- Image Sequence Processing - enДокумент27 страницImage Sequence Processing - enemadhsobhyОценок пока нет
- I'll Be Seeing You Brad Mehldau PDFДокумент6 страницI'll Be Seeing You Brad Mehldau PDFAcidbassОценок пока нет
- Kryptek Step by StepДокумент2 страницыKryptek Step by StepJohn NewberryОценок пока нет
- PRE - ASSESSMENT PAR-Q (Physical Activity Readiness Questionnaire)Документ5 страницPRE - ASSESSMENT PAR-Q (Physical Activity Readiness Questionnaire)Sarah DecenaОценок пока нет
- Turkish Infinitives and English Gerunds or Infinitives-SignedДокумент20 страницTurkish Infinitives and English Gerunds or Infinitives-Signedyuksel goknel100% (2)
- A Brief History of Gymnastics in AustraliaДокумент6 страницA Brief History of Gymnastics in AustraliaTea MetaОценок пока нет
- Heather Lee ResumeДокумент1 страницаHeather Lee Resumeheatherlee08Оценок пока нет
- Daftar Menu Ko Kei ChicДокумент5 страницDaftar Menu Ko Kei Chictitoeprisaputro saputroОценок пока нет
- Vargr: Shared Legendary ActionsДокумент2 страницыVargr: Shared Legendary ActionsEduardo GuedesОценок пока нет
- Transition Curve2019Документ20 страницTransition Curve2019Priyanshu YadavОценок пока нет
- EZTools 3.0用户手册-ENДокумент40 страницEZTools 3.0用户手册-ENJuan Pablo AcuñaОценок пока нет
- Unit 22 Lo2 Production BookletДокумент29 страницUnit 22 Lo2 Production Bookletapi-265014579Оценок пока нет
- Horrid Henry Meets GodДокумент5 страницHorrid Henry Meets GodAmhpman86% (7)
- Christie's Exceptional Sale 2012 Realises 18 Million/$28.1 Million/ 22.4 MillionДокумент4 страницыChristie's Exceptional Sale 2012 Realises 18 Million/$28.1 Million/ 22.4 MillionGavelОценок пока нет
- Digital Stepper Drive CW250: DescriptionsДокумент7 страницDigital Stepper Drive CW250: DescriptionsDavid MartinezОценок пока нет
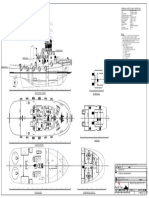
- Principal Particulars - Keppel Bay: E 13.8.15 C.G. Vessel Up-Dated To New Name and LayoutДокумент1 страницаPrincipal Particulars - Keppel Bay: E 13.8.15 C.G. Vessel Up-Dated To New Name and LayoutmanjuОценок пока нет
- 4rth LectureДокумент10 страниц4rth LectureAHMED DARAJОценок пока нет
- The Comedy TheatreДокумент6 страницThe Comedy TheatreAndreeaОценок пока нет
- Transposing Instruments - Music TheoryДокумент1 страницаTransposing Instruments - Music Theorygiorgio planesio100% (1)
- PS2 Game ListДокумент10 страницPS2 Game ListLivet Er OvervurdertОценок пока нет
- Note 31515 - Service ConnectionsДокумент3 страницыNote 31515 - Service ConnectionsMitchel NeyraОценок пока нет
- Skid Pack: Monoblock-FilterДокумент55 страницSkid Pack: Monoblock-FilterAsuncion Gomez-Cambronero LoroОценок пока нет