Вам также может понравиться
- Design and Analysis of An Adaptive Fuzzy Power System StabilizerДокумент7 страницDesign and Analysis of An Adaptive Fuzzy Power System StabilizermiguelankeloОценок пока нет
- System of Initial Excitation of Autonomous Synchronous Generator Based On Fuzzy Logic Controller: REVIEWДокумент5 страницSystem of Initial Excitation of Autonomous Synchronous Generator Based On Fuzzy Logic Controller: REVIEWvidhya associateОценок пока нет
- Dynamic Stability of SMIB System With Fuzzy Logic Based Power System StabilizerДокумент6 страницDynamic Stability of SMIB System With Fuzzy Logic Based Power System StabilizerInternational Journal of Research in Science & TechnologyОценок пока нет
- Current Status of Fuzzy System Applications in Power SystemsДокумент6 страницCurrent Status of Fuzzy System Applications in Power SystemsAndres ZuñigaОценок пока нет
- Fuzzy Control of Ac InductionДокумент6 страницFuzzy Control of Ac Inductionapi-19667371100% (1)
- 32.performance Analysis - FullДокумент10 страниц32.performance Analysis - FullyeisongarcesОценок пока нет
- Archive of SID: Dynamic Controllers Design For STATCOMДокумент7 страницArchive of SID: Dynamic Controllers Design For STATCOMRajaavikhram YohanandhanОценок пока нет
- Speed Control of Induction Motor Fuzzy Logic Controller Dengan PIДокумент8 страницSpeed Control of Induction Motor Fuzzy Logic Controller Dengan PISotya HaniefОценок пока нет
- Yük Frekans Makale PDFДокумент6 страницYük Frekans Makale PDFAnonymous CwsnlBОценок пока нет
- A Simple Fuzzy Excitation Control System (Avr)Документ6 страницA Simple Fuzzy Excitation Control System (Avr)Mmillion AlemayehuОценок пока нет
- Application of A Fuzzy PI Controller in Regulation of Active Piezoelectric Composite StructureДокумент4 страницыApplication of A Fuzzy PI Controller in Regulation of Active Piezoelectric Composite StructureSri SaiОценок пока нет
- A Simple Fuzzy Excitation Control System For Synchronous GeneratorДокумент5 страницA Simple Fuzzy Excitation Control System For Synchronous Generatoranil1216kumar100% (1)
- Ejaet 2 11 43 48Документ6 страницEjaet 2 11 43 48Mekonnen ShewaregaОценок пока нет
- Problem StatementДокумент9 страницProblem StatementTauseef Gillani100% (1)
- Neuro-Fuzzy Based Performance Evaluation of DC Shunt Motor: T. D. SudhakarДокумент10 страницNeuro-Fuzzy Based Performance Evaluation of DC Shunt Motor: T. D. SudhakarjegjegtОценок пока нет
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Документ11 страницIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationОценок пока нет
- Fuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012Документ5 страницFuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012bhargavkoriya837Оценок пока нет
- Field Current Speed Control of Direct Current Motor Using Fuzzy Logic TechniqueДокумент6 страницField Current Speed Control of Direct Current Motor Using Fuzzy Logic TechniqueEbie GhusaebiОценок пока нет
- Fuzzy Logic For Single AreaДокумент11 страницFuzzy Logic For Single Areaabata yohannesОценок пока нет
- AGC of interconnected two area thermal system using fuzzy PID and conventional PID controllerДокумент13 страницAGC of interconnected two area thermal system using fuzzy PID and conventional PID controllerlalit chola100% (1)
- Prseentation For Mid Sem ExamationДокумент32 страницыPrseentation For Mid Sem ExamationPyare MohanОценок пока нет
- TS-Fuzzy Controlled Active Power Filter For Load CompensationДокумент1 страницаTS-Fuzzy Controlled Active Power Filter For Load CompensationsunitharajababuОценок пока нет
- Comparative Analysis of MIT Rule and Lyapunov Rule in Model Reference Adaptive Control SchemeДокумент11 страницComparative Analysis of MIT Rule and Lyapunov Rule in Model Reference Adaptive Control SchemeiisteОценок пока нет
- Frequency Stabilization Using Fuzzy Logic Based Controller For Multi-Area Power System in Deregulated EnvironmentДокумент10 страницFrequency Stabilization Using Fuzzy Logic Based Controller For Multi-Area Power System in Deregulated Environmentyogi_sikarОценок пока нет
- Torque Control of Ac Motor With Fopid Controller Based On Fuzzy Neural AlgorithmДокумент18 страницTorque Control of Ac Motor With Fopid Controller Based On Fuzzy Neural AlgorithmijicsjournalОценок пока нет
- DC Servomotor Position Control Using PIDДокумент7 страницDC Servomotor Position Control Using PIDEnMaa 96Оценок пока нет
- Article1379931606 - Kumari and JhaДокумент6 страницArticle1379931606 - Kumari and JhaAlexSoteloОценок пока нет
- StatcomДокумент6 страницStatcomsathyakalyanОценок пока нет
- p311 PDFДокумент9 страницp311 PDFmohammad naseemОценок пока нет
- Carga Frecuencia USAДокумент8 страницCarga Frecuencia USAcastrojpОценок пока нет
- 535 11910 1 PB PDFДокумент12 страниц535 11910 1 PB PDFAnonymous fHEEc2lx6Оценок пока нет
- Chapter 1Документ46 страницChapter 1Asish NandaОценок пока нет
- International Journal of Computational Engineering Research (IJCER)Документ5 страницInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Оценок пока нет
- Adaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeДокумент18 страницAdaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeLittle ChickОценок пока нет
- Double Closed-Loop PI Controller Tuning For MotorДокумент8 страницDouble Closed-Loop PI Controller Tuning For MotorvrajakisoriDasiОценок пока нет
- Fuzzy PI Vector Control of Induction MotorДокумент5 страницFuzzy PI Vector Control of Induction MotorjhonnydesaОценок пока нет
- Power Quality Improvement by Shunt Active Performance Filters Emulated by Artificial Intelligence TechniquesДокумент5 страницPower Quality Improvement by Shunt Active Performance Filters Emulated by Artificial Intelligence TechniquesBlahОценок пока нет
- Journal of Electrical EngineeringДокумент16 страницJournal of Electrical EngineeringkodandaramОценок пока нет
- Ijeet 06 08 005Документ10 страницIjeet 06 08 005IAEME PublicationОценок пока нет
- 30-04-2021-1619773544-6-Ijeee-8. Ijeee - Advanced Controlling Schemes For Active Power Filter Under Varying Load A ReviewДокумент14 страниц30-04-2021-1619773544-6-Ijeee-8. Ijeee - Advanced Controlling Schemes For Active Power Filter Under Varying Load A Reviewiaset123Оценок пока нет
- Multi-Machine Power System Fuzzy Stabilizer Design Using Cuckoo Search AlgorithmДокумент5 страницMulti-Machine Power System Fuzzy Stabilizer Design Using Cuckoo Search AlgorithmKhalid FarooqОценок пока нет
- DynamicProjectArticle PDFДокумент9 страницDynamicProjectArticle PDFNeha JainОценок пока нет
- Step ResponseДокумент6 страницStep Responsenew007007Оценок пока нет
- ZD05050217220 PDFДокумент4 страницыZD05050217220 PDFAJER JOURNALОценок пока нет
- Eee IV Control Systems 10es43 Notes PDFДокумент124 страницыEee IV Control Systems 10es43 Notes PDFKiranjith KrishnanОценок пока нет
- Performance Analysis of Fuzzy Logic Based PI ControllerДокумент10 страницPerformance Analysis of Fuzzy Logic Based PI ControllerIJRASETPublicationsОценок пока нет
- Control Systems NotesДокумент50 страницControl Systems NotesEEE CRRОценок пока нет
- A Study On The Conventional and Fuzzy Control Steel-Cutting ProcessДокумент5 страницA Study On The Conventional and Fuzzy Control Steel-Cutting ProcessGökhan BaytekinОценок пока нет
- Fuzzy logic controller for power system stabilizerДокумент20 страницFuzzy logic controller for power system stabilizerMani KantaОценок пока нет
- Effect of adaptation gain in MRAC controlled systemsДокумент6 страницEffect of adaptation gain in MRAC controlled systemskkaytugОценок пока нет
- Ijeet PaperДокумент24 страницыIjeet PaperpadmajasivaОценок пока нет
- Autotronics and Vehicle Intelligence : Aeng6205Документ25 страницAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinОценок пока нет
- Ipc PPT (Group 3) 7thДокумент35 страницIpc PPT (Group 3) 7thChemical engrОценок пока нет
- Moving Horizon Model Based Control in The Presence of Feedback NoiseДокумент3 страницыMoving Horizon Model Based Control in The Presence of Feedback NoiseATSОценок пока нет
- Fuzzy Co-Ordination of FACTSДокумент11 страницFuzzy Co-Ordination of FACTSS Bharadwaj ReddyОценок пока нет
- FUZZY PID CONTROL FOR LOAD FREQUENCY IN TWO-AREA POWER SYSTEMДокумент23 страницыFUZZY PID CONTROL FOR LOAD FREQUENCY IN TWO-AREA POWER SYSTEMpetruskaraОценок пока нет
- Fractional Order PID Control of Rotor Suspension by Active Magnetic BearingsДокумент31 страницаFractional Order PID Control of Rotor Suspension by Active Magnetic BearingsNguyen Van QuyenОценок пока нет
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsОт EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsОценок пока нет
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОт EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОценок пока нет
- Armfield F1 Fluid Mechanics Series Brochure V2a Download 1Документ30 страницArmfield F1 Fluid Mechanics Series Brochure V2a Download 1paul contrerasОценок пока нет
- Ut Procedure 1Документ8 страницUt Procedure 1abhinavsmash66666Оценок пока нет
- Chap 3 DieterДокумент25 страницChap 3 DieterTumelo InnocentОценок пока нет
- Check Samsung indoor unit LED errorsДокумент84 страницыCheck Samsung indoor unit LED errorsbluerosedtuОценок пока нет
- Catalog WefatermДокумент55 страницCatalog WefatermAlin NicolaeОценок пока нет
- Numerical Study of Buckling of Thin PlatesДокумент7 страницNumerical Study of Buckling of Thin PlatesGogyОценок пока нет
- Triton X 100Документ2 страницыTriton X 100jelaapeОценок пока нет
- Biomechanics and Motor Control of Human Movement - Ch3Документ37 страницBiomechanics and Motor Control of Human Movement - Ch3guillecabezaОценок пока нет
- Serial Number:1920110212668 Exam Roll Number Grade CardДокумент2 страницыSerial Number:1920110212668 Exam Roll Number Grade Cardsimran vaidОценок пока нет
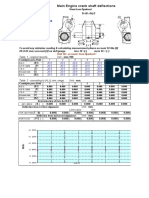
- Crankweb Deflections 9 Cyl ELANДокумент2 страницыCrankweb Deflections 9 Cyl ELANСлавик МосинОценок пока нет
- Computer Numerical Control CNC: Ken Youssefi Mechanical Engineering DepartmentДокумент43 страницыComputer Numerical Control CNC: Ken Youssefi Mechanical Engineering DepartmentSreedhar PugalendhiОценок пока нет
- Inverse Normal Distribution (TI-nSpire)Документ2 страницыInverse Normal Distribution (TI-nSpire)Shane RajapakshaОценок пока нет
- SCH 305Документ34 страницыSCH 305Qwin NajyaОценок пока нет
- WinspireДокумент44 страницыWinspireBhanu PrakashОценок пока нет
- Building Constraction 2Документ22 страницыBuilding Constraction 2Abdala M KreemОценок пока нет
- Prepared By:: Ir - Ts.Dr. Renga Rao KrishnamoorthyДокумент33 страницыPrepared By:: Ir - Ts.Dr. Renga Rao KrishnamoorthySyahir HamidonОценок пока нет
- Beam StandardДокумент44 страницыBeam StandardweldmindОценок пока нет
- Eurotherm 2116Документ156 страницEurotherm 2116jessicrmОценок пока нет
- Radiation Physics and Chemistry: Traian Zaharescu, Maria Râp Ă, Eduard-Marius Lungulescu, Nicoleta Butoi TДокумент10 страницRadiation Physics and Chemistry: Traian Zaharescu, Maria Râp Ă, Eduard-Marius Lungulescu, Nicoleta Butoi TMIGUEL ANGEL GARCIA BONОценок пока нет
- II PUC Mock Paper 2 MathematicsДокумент4 страницыII PUC Mock Paper 2 MathematicsPandit Katti NarahariОценок пока нет
- 11P Trusses ProblemsДокумент39 страниц11P Trusses ProblemsHoward Johann Gomez VОценок пока нет
- Magnetism and Electromagnetism - Electrical Multiple Choice Questions and AnswersДокумент10 страницMagnetism and Electromagnetism - Electrical Multiple Choice Questions and AnswersNagesh GillОценок пока нет
- All Ceramic Material SelectionДокумент6 страницAll Ceramic Material SelectionERIKA BLANQUETОценок пока нет
- Homework 1Документ6 страницHomework 1Ahmet Kemal ÇetinОценок пока нет
- Layers of The EarthДокумент105 страницLayers of The Earthbradbader100% (11)
- O Repensar Da Fonoaudiologia Na Epistemologia CienДокумент5 страницO Repensar Da Fonoaudiologia Na Epistemologia CienClaudilla L.Оценок пока нет
- Science - Book 10Документ312 страницScience - Book 10Jaishree RamОценок пока нет
- Learning Objectives-2: Uniform MotionДокумент7 страницLearning Objectives-2: Uniform MotionBryanHarold BrooОценок пока нет
- Program in Mathcad to Thin Rectangular PlatesДокумент12 страницProgram in Mathcad to Thin Rectangular PlatesPedro Luis Garcia VillegasОценок пока нет
- Astm D 2036-98 Standard Test Methods For Cyanides in Water PDFДокумент20 страницAstm D 2036-98 Standard Test Methods For Cyanides in Water PDFGianinaRoncalChávezОценок пока нет