Вам также может понравиться
- Sigma Fasteners - Hex NutДокумент9 страницSigma Fasteners - Hex Nutdavorp1402Оценок пока нет
- tn-19 Pipe Stiffnes Buried Gravity Flow PDFДокумент9 страницtn-19 Pipe Stiffnes Buried Gravity Flow PDFCarlos HerreraОценок пока нет
- Formulas For Torsional Properties and Stresses in Thin-Walled Closed and Open Cross SectionsДокумент10 страницFormulas For Torsional Properties and Stresses in Thin-Walled Closed and Open Cross SectionsAnonymous JEe6LWPОценок пока нет
- Fracture Mechanics Approach To Pressure Vessel Failures PDFДокумент8 страницFracture Mechanics Approach To Pressure Vessel Failures PDFsandeeppandey0789Оценок пока нет
- Book FrictionStir WeldingДокумент239 страницBook FrictionStir WeldingKaushik SenguptaОценок пока нет
- The Engineer - May 2022Документ52 страницыThe Engineer - May 2022yi qiОценок пока нет
- DIN 53294-Testing of Sandwiches Shear TestДокумент4 страницыDIN 53294-Testing of Sandwiches Shear TestNoor Ur RehmanОценок пока нет
- NBS Note: TechnicalДокумент182 страницыNBS Note: TechnicalErickОценок пока нет
- PepS v7.0 InstGuideДокумент35 страницPepS v7.0 InstGuideLuis OrtizОценок пока нет
- Polymer Technologies TDS CatalogДокумент249 страницPolymer Technologies TDS CatalogAminur RahmanОценок пока нет
- Endurance Regression Testing Method To Obtain A Hydrostatic Design Basis For Fiberglass PipeДокумент15 страницEndurance Regression Testing Method To Obtain A Hydrostatic Design Basis For Fiberglass PipeAvik Kundu100% (1)
- Gasketing Design Guide-Final - LRДокумент44 страницыGasketing Design Guide-Final - LRPinasthika KhatulistiwaОценок пока нет
- Cylinder Valve GuarДокумент2 страницыCylinder Valve Guarnvdprasad007Оценок пока нет
- B25 - Over-And-Under Shotguns - Target: An Exceptional CreationДокумент2 страницыB25 - Over-And-Under Shotguns - Target: An Exceptional CreationPajero PowerОценок пока нет
- Die Maintenance. Die Repair.Документ9 страницDie Maintenance. Die Repair.zfrlОценок пока нет
- UntitledДокумент587 страницUntitledGuillermo HernánОценок пока нет
- Advances in Theory of Plastic Mechanism Control: Closed Form Solution For MR-FramesДокумент21 страницаAdvances in Theory of Plastic Mechanism Control: Closed Form Solution For MR-FramesJUAN CARLOS JIMENEZ PACHECOОценок пока нет
- A Detailed Evaluation of Eurocode and ISO Methodology On Earthquake Resistant Geotechnical DesignДокумент8 страницA Detailed Evaluation of Eurocode and ISO Methodology On Earthquake Resistant Geotechnical DesignJack DoverОценок пока нет
- High Density Polyethylene - HDPE - Pipe and FittingsДокумент8 страницHigh Density Polyethylene - HDPE - Pipe and Fittingsnilesh_erusОценок пока нет
- Comparison Between AISC LRFD and ASDДокумент107 страницComparison Between AISC LRFD and ASDJordanОценок пока нет
- High-Density Polyethylene PipeДокумент15 страницHigh-Density Polyethylene PipeleekyОценок пока нет
- 10.1016-0045-7949 (92) 90462-9-Study On Elephant-Foot Buckling of Broad Liquid Storage Tanks by Nonlinear Theory of ShellsДокумент6 страниц10.1016-0045-7949 (92) 90462-9-Study On Elephant-Foot Buckling of Broad Liquid Storage Tanks by Nonlinear Theory of ShellshamedpdmsОценок пока нет
- Worldwide Fastener Standard: WX 100 Finish Specification 1. ScopeДокумент19 страницWorldwide Fastener Standard: WX 100 Finish Specification 1. ScopeCarmen HernandezОценок пока нет
- Clevis Bolts Material 2Документ14 страницClevis Bolts Material 2Andres_Pastor1987Оценок пока нет
- KTM Valve General CatalogДокумент20 страницKTM Valve General Catalogferdy110276Оценок пока нет
- Honeywell S245B PDFДокумент4 страницыHoneywell S245B PDFMod KaewdaengОценок пока нет
- U FrameДокумент6 страницU FrameVijayGokulavasan SОценок пока нет
- Questions & Answers: Webinar: Leveraging Caesar Ii and Featools Featuring PRGДокумент8 страницQuestions & Answers: Webinar: Leveraging Caesar Ii and Featools Featuring PRGMina MagdyОценок пока нет
- ERIKS Sealing Technology Oil and Gas Applications - OptДокумент60 страницERIKS Sealing Technology Oil and Gas Applications - OptAzwan ShahmeeОценок пока нет
- Re27219 2018-10Документ8 страницRe27219 2018-10Dheny OrlandoОценок пока нет
- Stainless Steel Clamp Union Din 32676Документ7 страницStainless Steel Clamp Union Din 32676Sándor PetrovicsОценок пока нет
- Joint Industry Project (JIP) : Report No.: 2022-0819, Rev. 01 Document No.: 1261742 Date: 2022-07-04Документ132 страницыJoint Industry Project (JIP) : Report No.: 2022-0819, Rev. 01 Document No.: 1261742 Date: 2022-07-04Osama AshourОценок пока нет
- ResearchProjectsBurrFormationandDeburring 0304 TECH2Документ127 страницResearchProjectsBurrFormationandDeburring 0304 TECH2Bebzy MuetzОценок пока нет
- Metric Fasteners For Use in Structural Applications: ASME B18.2.6M-2012Документ20 страницMetric Fasteners For Use in Structural Applications: ASME B18.2.6M-2012Ganesh YadavОценок пока нет
- Robotics and Automation Vol 1Документ410 страницRobotics and Automation Vol 1Prasiddh PatelОценок пока нет
- Seismic Design Guidelines For Engineers & Architects 2019Документ52 страницыSeismic Design Guidelines For Engineers & Architects 2019FAKAM HUGUES ROUSSELОценок пока нет
- Basic Load Cases Used For Piping Stress AnalysisДокумент5 страницBasic Load Cases Used For Piping Stress Analysissemin prsesОценок пока нет
- 5-1940-8040 Rev. 05Документ15 страниц5-1940-8040 Rev. 05Mathi Vinoth PillaiОценок пока нет
- WindSonic GPA Manual 1405-PS-0019 Issue 25Документ35 страницWindSonic GPA Manual 1405-PS-0019 Issue 25eduardo ayalaОценок пока нет
- Astm G 17Документ6 страницAstm G 17DdsОценок пока нет
- DNVGL RU SHIP Pt6Ch2Документ208 страницDNVGL RU SHIP Pt6Ch2Tudorancea MihaiОценок пока нет
- Emaco S22 NBДокумент47 страницEmaco S22 NBSyed Fakher Imam AbediОценок пока нет
- 60 Minutes-60 Questions: Mathematics TestДокумент14 страниц60 Minutes-60 Questions: Mathematics TestJihyun YeonОценок пока нет
- Gulfpub Wo 202204Документ62 страницыGulfpub Wo 202204giovanniОценок пока нет
- H2 Presentation - About Haskel 2022 PDFДокумент25 страницH2 Presentation - About Haskel 2022 PDFSantiago Cabarcas L. de UrquizoОценок пока нет
- IADC/SPE 74488 Advanced Slip Crushing Considerations For Deepwater DrillingДокумент15 страницIADC/SPE 74488 Advanced Slip Crushing Considerations For Deepwater DrillingJaaTa Da shaanОценок пока нет
- Elastic Properties of PotatoДокумент5 страницElastic Properties of Potatopriya07rajОценок пока нет
- Hawkeye-100 User Manual (Colepcon)Документ21 страницаHawkeye-100 User Manual (Colepcon)Ramiro Lozano RuedaОценок пока нет
- Oil & Gas Sector ReportДокумент19 страницOil & Gas Sector ReportSarthak ChincholikarОценок пока нет
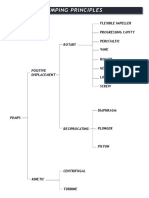
- Common Pumping Principles: Flexible Impeller Progressing Cavity RotaryДокумент12 страницCommon Pumping Principles: Flexible Impeller Progressing Cavity RotaryPuneet KankariaОценок пока нет
- Quality Manual: Title: Document Number: QCC1479 Revision: 66 Page 1 of 46Документ46 страницQuality Manual: Title: Document Number: QCC1479 Revision: 66 Page 1 of 46avinash_k007Оценок пока нет
- P Mazilu, A Skiadas Auth, J L Chenot, Bookzz OrgДокумент342 страницыP Mazilu, A Skiadas Auth, J L Chenot, Bookzz OrgDiriba AbdiОценок пока нет
- PDS Stopaq Subsea Intermediate Wrap V3 enДокумент1 страницаPDS Stopaq Subsea Intermediate Wrap V3 enAndyОценок пока нет
- Charge PerformanceДокумент4 страницыCharge PerformanceJoy GuhaОценок пока нет
- Valve Proving SystemДокумент5 страницValve Proving SystemcemsavantОценок пока нет
- Ras Markaz Crude Oil Park Project (Phase 1) : 9686-8430-14-713-4001-001 - B1. DWG Cad File NameДокумент1 страницаRas Markaz Crude Oil Park Project (Phase 1) : 9686-8430-14-713-4001-001 - B1. DWG Cad File NameANIL PLAMOOTTILОценок пока нет
- Decoding Pressure Vessel Design PDFДокумент7 страницDecoding Pressure Vessel Design PDFKelvin IbrahimОценок пока нет
- Obtaining Hydrostatic Design Basis For Thermoplastic Pipe Materials or Pressure Design Basis For Thermoplastic Pipe ProductsДокумент16 страницObtaining Hydrostatic Design Basis For Thermoplastic Pipe Materials or Pressure Design Basis For Thermoplastic Pipe ProductsDuy NguyenОценок пока нет
- Optimal Design of Conical Springs: Engineering With Computers March 2009Документ15 страницOptimal Design of Conical Springs: Engineering With Computers March 2009Suraj_73Оценок пока нет
- Home Machine - Parts - Index Spring IndexДокумент9 страницHome Machine - Parts - Index Spring IndexRakesh KumarОценок пока нет
- Practical Implementation of Hyperelastic Material Methods in FEA ModelsДокумент49 страницPractical Implementation of Hyperelastic Material Methods in FEA ModelsRishabh TrivediОценок пока нет
- Problem Identification and VEJP: Lesson 07Документ13 страницProblem Identification and VEJP: Lesson 07Rishabh TrivediОценок пока нет
- Biaxial Testing of Sheet Metal: An Experimental-Numerical AnalysisДокумент94 страницыBiaxial Testing of Sheet Metal: An Experimental-Numerical AnalysisRishabh TrivediОценок пока нет
- Course: Metal Casting Module No. 1: INTRODUCTION: Lecture No-2 Terms and Steps in Sand CastingДокумент4 страницыCourse: Metal Casting Module No. 1: INTRODUCTION: Lecture No-2 Terms and Steps in Sand CastingRishabh TrivediОценок пока нет
- 2015 - 16 Class Schedule Weekend Batches: Electronics Engineering Weekend - NW (Noida)Документ2 страницы2015 - 16 Class Schedule Weekend Batches: Electronics Engineering Weekend - NW (Noida)Rishabh TrivediОценок пока нет
- SRFP 2015 Web List NewДокумент1 страницаSRFP 2015 Web List NewRishabh TrivediОценок пока нет
- Tes 32 MeritДокумент6 страницTes 32 MeritRishabh TrivediОценок пока нет
- Plan of ActionДокумент72 страницыPlan of ActionRishabh TrivediОценок пока нет
- Hydraulic System Trainer AS-10Документ13 страницHydraulic System Trainer AS-10Tanlets Gery100% (1)
- Midas Civil WebinarДокумент51 страницаMidas Civil WebinarCHarlesghylonОценок пока нет
- Compax CL: Operator S ManualДокумент114 страницCompax CL: Operator S ManualPicek30Оценок пока нет
- Fluid and Thermodynamics - Volume 1 - Basic Fluid MechanicsДокумент652 страницыFluid and Thermodynamics - Volume 1 - Basic Fluid Mechanicslig100% (1)
- Hydraulic Circuits Tutorial PDFДокумент40 страницHydraulic Circuits Tutorial PDFShaheen S. Ratnani69% (13)
- Valtra T121-T191 EngineДокумент29 страницValtra T121-T191 EngineJakaОценок пока нет
- Stiffness Modifiers For Walls ETABSДокумент3 страницыStiffness Modifiers For Walls ETABSHiren DesaiОценок пока нет
- Ec PDFДокумент1 232 страницыEc PDFАндрей НадточийОценок пока нет
- Tensile Fabric Details 3Документ1 страницаTensile Fabric Details 3FRANKLYN SPENCERОценок пока нет
- Sampel Mech - CalculationДокумент36 страницSampel Mech - CalculationMuhammad Farizan Praevia100% (1)
- Scroll Bending Attachment Model 36621Документ26 страницScroll Bending Attachment Model 36621renspur100% (1)
- 2.1 Linear Motion 2020Документ70 страниц2.1 Linear Motion 2020aagi23Оценок пока нет
- Power Generation Using Speed Breaker IJERTV10IS090084Документ3 страницыPower Generation Using Speed Breaker IJERTV10IS090084Nilli BilliОценок пока нет
- Brand IndexДокумент44 страницыBrand IndexAhmed Zakareya Emam100% (2)
- Format - CISДокумент8 страницFormat - CISgopichandallakaОценок пока нет
- Robots User Manual (CE) - EnglishДокумент170 страницRobots User Manual (CE) - EnglishVlad-Andrei Cucuteanu100% (3)
- Navier Stokes PDFДокумент22 страницыNavier Stokes PDFKhirupasagar RavibaskarОценок пока нет
- 15P701Документ4 страницы15P701rajakrishnanОценок пока нет
- Suspension SystemДокумент72 страницыSuspension SystemMubarek TeshomeОценок пока нет
- 528N - Electrically Non-Conductive Hose: Performance Exceeds SAE 100 R8 / ISO 3949 Type R8 / DIN EN 855 Type R8Документ1 страница528N - Electrically Non-Conductive Hose: Performance Exceeds SAE 100 R8 / ISO 3949 Type R8 / DIN EN 855 Type R8Jas SumОценок пока нет
- Plastic Molding TutorialДокумент32 страницыPlastic Molding TutorialSergio RodriguezОценок пока нет
- Marksman Housing PDFДокумент2 страницыMarksman Housing PDFAyahKenzieОценок пока нет
- Ultra - Temp Installation and Maintenance Manual IOM 101.2Документ16 страницUltra - Temp Installation and Maintenance Manual IOM 101.2Abdiel Kadir Martinez MendozaОценок пока нет
- Surging & Blow Out of Loop Seals in A CFBC BoilerДокумент9 страницSurging & Blow Out of Loop Seals in A CFBC Boilermohamed faragОценок пока нет
- Engelhardt Steel Notes VI - Connections PDFДокумент29 страницEngelhardt Steel Notes VI - Connections PDFPauccar Rhp HpОценок пока нет
- Company Overview: Leading Global Manufacturer of Pushing, Pulling, Lifting, and Rotating SolutionsДокумент8 страницCompany Overview: Leading Global Manufacturer of Pushing, Pulling, Lifting, and Rotating Solutionsj24maybe5963Оценок пока нет
- Metalworking 24479 Metaalbewerking UKДокумент21 страницаMetalworking 24479 Metaalbewerking UKOmkec DelalićОценок пока нет
- Vessel Foundation 1 CalcДокумент7 страницVessel Foundation 1 CalcmakcodetechОценок пока нет
- Bohler Ti 52Документ1 страницаBohler Ti 52Anonymous nKOyHbОценок пока нет
- Liebherr Diesel Engine D976 With Forged Common Rail: Atzheavy Duty Worldwide March 2020Документ9 страницLiebherr Diesel Engine D976 With Forged Common Rail: Atzheavy Duty Worldwide March 2020weldsaidiОценок пока нет