Вам также может понравиться
- Board Level Shield 2 PieceДокумент1 страницаBoard Level Shield 2 PieceDamianОценок пока нет
- Adafruit Neopixel UberguideДокумент39 страницAdafruit Neopixel UberguideDamianОценок пока нет
- Activation InfoДокумент1 страницаActivation InfoDamianОценок пока нет
- Tda8950 PDFДокумент39 страницTda8950 PDFElcura EdgarОценок пока нет
- WS2812Документ5 страницWS2812Michele VeceОценок пока нет
- TI Designs: 500ma Wireless Charger Booster Pack With Gauge: TIDA-00669Документ2 страницыTI Designs: 500ma Wireless Charger Booster Pack With Gauge: TIDA-00669DamianОценок пока нет
- BoardLevelShield LowProfileДокумент1 страницаBoardLevelShield LowProfileDamianОценок пока нет
- Board Level Shield 1 PieceДокумент1 страницаBoard Level Shield 1 PieceDamianОценок пока нет
- Request a Quote for Custom ShieldsДокумент1 страницаRequest a Quote for Custom ShieldsDamianОценок пока нет
- bq5105xB High-Efficiency Qi V1.1-Compliant Wireless Power Receiver and Battery ChargerДокумент44 страницыbq5105xB High-Efficiency Qi V1.1-Compliant Wireless Power Receiver and Battery ChargerDamianОценок пока нет
- TI CCdebugger05 User MannualДокумент20 страницTI CCdebugger05 User MannualDamianОценок пока нет
- Functions of MatricesДокумент34 страницыFunctions of MatricesRenzhe ZhengОценок пока нет
- Shielded Power Inductors - PFL2015Документ2 страницыShielded Power Inductors - PFL2015DamianОценок пока нет
- 500ma Wireless Charger Booster Pack With Gauge Reference DesignДокумент25 страниц500ma Wireless Charger Booster Pack With Gauge Reference DesignDamianОценок пока нет
- bq5105xB High-Efficiency Qi V1.1-Compliant Wireless Power Receiver and Battery ChargerДокумент44 страницыbq5105xB High-Efficiency Qi V1.1-Compliant Wireless Power Receiver and Battery ChargerDamianОценок пока нет
- BMA250 Accelerometer I2C SPI PDFДокумент74 страницыBMA250 Accelerometer I2C SPI PDFDamianОценок пока нет
- EW8051 DebuggingGuideДокумент394 страницыEW8051 DebuggingGuideDamian100% (1)
- Tidr191 SchematicДокумент4 страницыTidr191 SchematicDamianОценок пока нет
- EW8051 CompilerReference PDFДокумент366 страницEW8051 CompilerReference PDFDamianОценок пока нет
- IAR RefДокумент137 страницIAR RefDamianОценок пока нет
- Book 1Документ20 страницBook 1DamianОценок пока нет
- Random MatricesДокумент43 страницыRandom MatricesDamianОценок пока нет
- Master Slave SwitchДокумент4 страницыMaster Slave SwitchDamianОценок пока нет
- EW8051 AssemblerReferenceДокумент129 страницEW8051 AssemblerReferenceDamianОценок пока нет
- TSL 2561Документ42 страницыTSL 2561P BОценок пока нет
- Temt6000X01: Ambient Light Sensor, Rohs Compliant, Released For Lead (PB) - Free Solder Process, Aec-Q101 ReleasedДокумент8 страницTemt6000X01: Ambient Light Sensor, Rohs Compliant, Released For Lead (PB) - Free Solder Process, Aec-Q101 ReleasedDamianОценок пока нет
- PCA9956AДокумент53 страницыPCA9956ADamianОценок пока нет
- RM MPU 9250A 00 v1.6Документ55 страницRM MPU 9250A 00 v1.6DamianОценок пока нет
- PCA9955AДокумент62 страницыPCA9955ADamianОценок пока нет
- InvenSense Motion Sensor Universal EV User Guide3 PDFДокумент15 страницInvenSense Motion Sensor Universal EV User Guide3 PDFDamianОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Led TV: User ManualДокумент2 страницыLed TV: User ManualJanith Saumya BandaraОценок пока нет
- Car2x Development Validation ToolДокумент6 страницCar2x Development Validation ToolSri Natha DesikanОценок пока нет
- QR Code Based Toll Gate Accessing System Reducing ManpowerДокумент3 страницыQR Code Based Toll Gate Accessing System Reducing ManpowerInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- 25 Log Files That Will Transform Your VSphere TroubleshootingДокумент9 страниц25 Log Files That Will Transform Your VSphere TroubleshootingRudra VmwareОценок пока нет
- Wireless Body Area Networks (WBAN) : Viswavardhanreddy KДокумент87 страницWireless Body Area Networks (WBAN) : Viswavardhanreddy KaditvasОценок пока нет
- MO Class Abbreviated Name Full NameДокумент3 страницыMO Class Abbreviated Name Full NameAnonymous yzm4usswsОценок пока нет
- Advanced Use of C Language: ContentДокумент23 страницыAdvanced Use of C Language: ContentsybaritzОценок пока нет
- Meet the Employer and Discuss Your Skills for the Customer Support RoleДокумент3 страницыMeet the Employer and Discuss Your Skills for the Customer Support Rolebacklever95100% (1)
- IDC IT Services Taxonomy 2019Документ17 страницIDC IT Services Taxonomy 2019Alexander RamírezОценок пока нет
- AN0060: Bootloader With AES EncryptionДокумент16 страницAN0060: Bootloader With AES EncryptiondavbratОценок пока нет
- CCIE Collaboration Home Lab Topology and Base ConfigurationsДокумент26 страницCCIE Collaboration Home Lab Topology and Base Configurationsloading01Оценок пока нет
- Unit 1 Inside The PC Core ComponentsДокумент85 страницUnit 1 Inside The PC Core Componentskasyap raut100% (2)
- PT - Abc ProjectДокумент16 страницPT - Abc ProjectJoshua Alexander Hasoloan PanggabeanОценок пока нет
- PCIDSS QRGv3 2 PDFДокумент40 страницPCIDSS QRGv3 2 PDFKris KarrОценок пока нет
- 2600 14-2Документ30 страниц2600 14-2Μαυροσκούφης ΔόκτωρОценок пока нет
- Syslog-Ng Guide HPUXДокумент7 страницSyslog-Ng Guide HPUXDenilson NascimentoОценок пока нет
- OutputlogДокумент424 страницыOutputlogalborada69Оценок пока нет
- Nd-La MV9 P-2Документ10 страницNd-La MV9 P-2João MiguelОценок пока нет
- 3BSE041586-600 A en Compact Control Builder AC 800M 6.0 Product GuideДокумент150 страниц3BSE041586-600 A en Compact Control Builder AC 800M 6.0 Product GuideShubham DesaiОценок пока нет
- Student Database PresentationДокумент22 страницыStudent Database PresentationAnonymous fSe9WA5Оценок пока нет
- On Digital JewelleryДокумент11 страницOn Digital JewelleryMahesh NidumoluОценок пока нет
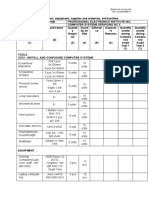
- F04 Checklist of Tools, Equipment, Supplies and Materials, and Facilities NEW FORM CSSДокумент13 страницF04 Checklist of Tools, Equipment, Supplies and Materials, and Facilities NEW FORM CSSgillian marbebe100% (1)
- Extract Vector Images From PDF LinuxДокумент2 страницыExtract Vector Images From PDF LinuxJulieОценок пока нет
- DrillWell v2.6 - User ManualДокумент358 страницDrillWell v2.6 - User ManualJesús LeyvaОценок пока нет
- HP Z240 Workstation Technical SpecsДокумент4 страницыHP Z240 Workstation Technical SpecsMartand Pratap SinghОценок пока нет
- 18-Performance Tuning in SAP ABAPДокумент11 страниц18-Performance Tuning in SAP ABAPKIRANОценок пока нет
- Elastic Siem Fundamentals PDFДокумент1 страницаElastic Siem Fundamentals PDFAung AungОценок пока нет
- EASILY CONNECT CLIENTS TO ULTRA-FAST BROADBAND WITH POINT-TO-MULTIPOINTДокумент1 страницаEASILY CONNECT CLIENTS TO ULTRA-FAST BROADBAND WITH POINT-TO-MULTIPOINTchikoaqОценок пока нет
- PowerFlex 525 Logic Status Word Bit Level Description in Controllogix Tag DatabaseДокумент5 страницPowerFlex 525 Logic Status Word Bit Level Description in Controllogix Tag DatabaseDavid ChagasОценок пока нет
- K21 Academy Oracle AppsDBA 10 Upgrade DocsДокумент17 страницK21 Academy Oracle AppsDBA 10 Upgrade DocsRa12appsОценок пока нет