Академический Документы
Профессиональный Документы
Культура Документы
KR c4 Ethercat Kss Vss 82-83-84 FR
Загружено:
kolosuxОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
KR c4 Ethercat Kss Vss 82-83-84 FR
Загружено:
kolosuxАвторское право:
Доступные форматы
Controller Option KUKA Roboter GmbH
KR C4 EtherCAT
Configuration
Pour logiciel KUKA System Software 8.2, 8.3 et 8.4
Pour logiciel VW System Software 8.2 et 8.3
KR C4 Ether-
CAT
Edition: 23.06.2015
Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
KR C4 EtherCAT
Copyright 2015
KUKA Roboter GmbH
Zugspitzstrae 140
D-86165 Augsburg
Allemagne
La prsente documentation ne pourra tre reproduite ou communique des tiers, mme par ex-
traits, sans l'autorisation expresse du KUKA Roboter GmbH.
Certaines fonctions qui ne sont pas dcrites dans la prsente documentation peuvent galement
tourner sur ce contrleur. Dans ce cas, l'utilisateur ne pourra exiger ces fonctions en cas de nouvelle
livraison ou de service aprs-vente.
Nous avons vrifi la concordance entre cette brochure et le matriel ainsi que le logiciel dcrits. Des
diffrences ne peuvent tre exclues. Pour cette raison, nous ne pouvons garantir la concordance
exacte. Les informations de cette brochure sont nanmoins vrifies rgulirement afin d'inclure les
corrections indispensables dans l'dition suivante.
Sous rserve de modifications techniques n'influenant pas les fonctions.
Traduction de la documentation originale
KIM-PS5-DOC
Publication: Pub KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 (PDF) fr
Structure de livre: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2.1
Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
2 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
Table des matires
Table des matires
1 Introduction .................................................................................................. 5
1.1 Cible ........................................................................................................................... 5
1.2 Documentation du robot industriel ............................................................................. 5
1.3 Reprsentation des remarques .................................................................................. 5
1.4 Marques ..................................................................................................................... 6
1.5 Termes utiliss ........................................................................................................... 6
2 Description du produit ................................................................................ 7
2.1 Utilisation conforme aux fins prvues ........................................................................ 8
3 Scurit ........................................................................................................ 9
4 Configuration ............................................................................................... 11
4.1 Aperu ....................................................................................................................... 11
4.2 Mise disposition des fichiers de description d'appareils ......................................... 12
4.3 Saisie de l'adresse IP de KUKA Line Interface .......................................................... 12
4.4 Insrer manuellement des appareils .......................................................................... 12
4.5 Insrer des appareils automatiquement (scan de bus) .............................................. 13
4.6 Configuration d'appareils ........................................................................................... 14
4.6.1 Onglet Gnralits ............................................................................................... 14
4.6.2 Onglet Objets de donnes de processus .......................................................... 15
4.6.3 Onglet Modules .................................................................................................... 16
4.7 Configuration de File Access over EtherCAT ............................................................ 17
4.8 Contrle et modification de la topologie ..................................................................... 17
4.8.1 Onglet Topologie ................................................................................................. 18
5 Diagnostic .................................................................................................... 21
5.1 Affichage des donnes de diagnostic ........................................................................ 21
5.1.1 KUKA Extension Bus (SYS-X44) .......................................................................... 21
5.2 Diagnostic d'appareils ................................................................................................ 22
6 Messages ..................................................................................................... 25
7 SAV KUKA .................................................................................................... 29
7.1 Demande d'assistance ............................................................................................... 29
7.2 Assistance client KUKA ............................................................................................. 29
Index ............................................................................................................. 37
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 3 / 39
KR C4 EtherCAT
4 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
1 Introduction
1 Introduction
t
1.1 Cible
t
Cette documentation s'adresse l'utilisateur avec les connaissances sui-
vantes :
Connaissances approfondies de la programmation KRL
Connaissances approfondies du systme de la commande de robot
Connaissances approfondies des bus de champ
Connaissances de WorkVisual
1.2 Documentation du robot industriel
La documentation du robot industriel est forme des parties suivantes :
Documentation pour l'ensemble mcanique du robot
Documentation pour la commande de robot
Manuels de service et de programmation pour le logiciel systme
Instructions relatives aux options et accessoires
Catalogue des pices sur support de donnes
Chaque manuel est un document individuel.
1.3 Reprsentation des remarques
Scurit Ces remarques se rfrent la scurit et doivent donc tre respectes im-
prativement.
Ces remarques signifient que des blessures
graves, voire mortelles vont srement ou trs vrai-
semblablement tre la consquence de l'absence de mesures de prcau-
tion.
Ces remarques signifient que des blessures
graves, voire mortelles peuvent tre la cons-
quence de l'absence de mesures de prcaution.
Ces remarques signifient que des blessures l-
gres peuvent tre la consquence de l'absence
de mesures de prcaution.
Ces remarques signifient que des dommages ma-
triels peuvent tre la consquence de l'absence
de mesures de prcaution.
Ces remarques renvoient des informations importantes pour la s-
curit ou des mesures de scurit gnrales.
Ces remarques ne se rfrent pas des dangers isols ou des me-
sures de scurit individuelles.
Cette remarque attire l'attention sur des procdures permettant d'viter ou
d'liminer des cas d'urgence ou de panne :
Les procdures caractrises par cette remarque doi-
vent tre respectes avec prcision.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 5 / 39
KR C4 EtherCAT
Remarques Ces remarques facilitent le travail ou renvoient des informations supplmen-
taires.
Remarque facilitant le travail ou renvoi des informations suppl-
mentaires.
1.4 Marques
est une marque dpose par la socit Beckhoff Automation
GmbH.
1.5 Termes utiliss
Terme Description
CAN Controller Area Network
FSoE Fail Safe over EtherCAT
Protocole pour la transmission de donnes relatives la
scurit via EtherCAT en utilisant un Matre FSoE et un
Esclave FSoE.
KLI KUKA Line Interface
Interface Ethernet du systme de contrleur de robot (ne
fonctionne pas en temps rel) pour la communication
externe
API Automate programmable industriel
Step 7 Logiciel de configuration de Siemens
WorkVisual Logiciel de configuration de KUKA pour la configuration
de bus de champ
6 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
2 Description du produit
2 Description du produit
2
EtherCAT est un bus de champ bas sur Ethernet appropri pour les exi-
t
gences de temps rel.
Compatibilit KR C4 EtherCAT est compatible avec les bus de champ suivants :
KR C4 PROFINET 2.0 2.3 et 3.0 3.2
KR C4 EtherNet/IP 1.0, 1.1 et 2.0
KR C4 PROFIBUS
KR C4 PROFIBUS CP 5614 1.0 et 2.0
KR C4 DeviceNet
KR C4 Interbus 1.0, 1.1 et 2.0
EtherCAT Bridge
EtherCAT Bridge FSoE
Esclave VARAN
Fonctions Les fonctions et classes d'appareils suivantes sont autorises :
EtherCAT IO (communication cyclique)
Appareils bass sur des slots (Modular Device Profile)
Appareils n'tant pas bass sur des slots
Passerelle PROFIBUS EtherCAT
Passerelle DeviceNet EtherCAT
File Access over EtherCAT
CANopen over EtherCAT
Appareils passerelle (convertisseurs d'EtherCAT sur d'autres bus de
champ)
PROFIBUS
DeviceNet
EtherCAT Bridge
Esclave VARAN
Restrictions Les classes d'appareils / fonctions suivantes ne sont p. ex. pas autorises :
Servodrive over EtherCAT
ADS over EtherCAT
Ethernet over EtherCAT
Vendor specific over EtherCAT
Appareils dcouplables
Slave to Slave Kommunikation
Cration et configuration d'objets de donnes de processus
Modification de la structure d'objets de donnes de processus
Rglages avancs (p. ex. chien de garde, dlai de temporisation, proto-
cole de bote mail)
Fail Safe over EtherCAT ne peut tre utilis qu'en combinaison avec
EtherCAT Bridge FSoE pour la liaison avec une commande de scu-
rit. Des informations supplmentaires sont fournies dans la docu-
mentation EtherCAT Bridge FSoE (Master/Master).
Logiciel de La configuration de KR C4 EtherCAT est effectue sur un portable ou un PC.
configuration Le logiciel suivant est ncessaire pour la configuration :
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 7 / 39
KR C4 EtherCAT
WorkVisual 4.0
Les conditions pralables pour l'installation de WorkVisual sont dcrites
dans la documentation de WorkVisual.
Types d'appareils Les types d'appareils suivants sont utiliss avec KR C4 EtherCAT :
Matre: commande suprieure pilotant tous les composants d'une installa-
tion.
Esclave : appareil priphrique subordonn un Matre. Un Esclave est
compos d'un ou de plusieurs modules.
Limites du Nombre maximum d'Esclaves EtherCAT : 128
systme Taille des donnes de processus : EtherCAT-Frame 1536 octets
2.1 Utilisation conforme aux fins prvues
Utilisation KR C4 EtherCAT est prvu exclusivement pour la configuration et le diagnos-
tic de modules de bus EtherCAT sur KUKA Extension Bus avec le logiciel KU-
KA.WorkVisual.
Utilisation non Toute utilisation non conforme aux fins prvues est considre comme une er-
conforme reur d'utilisation et est interdite. Dans ce cas, le fabricant dcline express-
ment toute responsabilit pour les dommages ventuels occasionns. Le
risque est la seule charge de l'exploitant.
Exemples d'utilisations non conformes :
Configuration de modules de bus EtherCAT avec des paramtres autres
que les paramtres spcifis
8 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
3 Scurit
3 Scurit
Cette documentation contient des remarques relatives la scurit se rfrant
de faon spcifique au produit dcrit ici. Les informations fondamentales rela-
t
tives la scurit concernant le robot industriel peuvent tre consultes dans
le chapitre "Scurit" du manuel ou des instructions de montage du contrleur
de robot.
Il faut respecter le chapitre "Scurit" du manuel
ou des instructions de montage du contrleur de
robot. Un danger de mort, un risque de blessures graves ou de dommages
matriels importants pourraient sinon s'ensuivre.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 9 / 39
KR C4 EtherCAT
10 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
4 Configuration
4 Configuration
4
4.1 Aperu
t
Etape Description
1 Configurer la commande prioritaire avec le logiciel de confi-
guration du fabricant.
Remarque : cette opration ne doit tre effectue que si une
commande prioritaire est utilise. Le fichier de description
d'appareils ncessit doit tre fourni par le fabricant de
l'appareil.
L'interface vers le contrleur prioritaire peut tre p. ex. via
EtherCAT Bridge ou EtherCAT Bridge FSoE Des informations
supplmentaires sont fournies dans la documentation Ether-
CAT Bridge ou EtherCAT Bridge FSoE.
2 Mettre les fichiers de description d'appareils disposition.
(>>> 4.2 "Mise disposition des fichiers de description
d'appareils" Page 12)
3 Saisir l'adresse IP de KUKA Line Interface (option).
(>>> 4.3 "Saisie de l'adresse IP de KUKA Line Interface"
Page 12)
Remarque : l'adresse IP de la KLI est ncessaire pour les
fonctions en ligne telles que le scan de bus ou le diagnostic
d'appareils.
4 Insrer les appareils EtherCAT manuellement ou automati-
quement dans le bus.
(>>> 4.4 "Insrer manuellement des appareils" Page 12)
(>>> 4.5 "Insrer des appareils automatiquement (scan de
bus)" Page 13)
5 Configurer les appareils EtherCAT.
(>>> 4.6 "Configuration d'appareils" Page 14)
6 Configurer File Access over EtherCAT (option).
(>>> 4.7 "Configuration de File Access over EtherCAT"
Page 17)
7 Contrler la topologie dans l'diteur de topologie et la modi-
fier, si ncessaire.
(>>> 4.8 "Contrle et modification de la topologie" Page 17)
8 Cbler les entres et sorties dans WorkVisual.
9 Transfrer la configuration de bus de WorkVisual sur le
contrleur de robot.
Pour tout complment d'informations concernant les squences
d'opration effectuer dans WorkVisual, veuillez consulter la docu-
mentation de WorkVisual. Des informations concernant les s-
quences dans le logiciel de configuration du contrleur prioritaire sont
fournies dans la documentation de ce logiciel.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 11 / 39
KR C4 EtherCAT
4.2 Mise disposition des fichiers de description d'appareils
Pour la configuration d'EtherCAT, WorkVisual ncessite les fichiers de des-
cription d'appareils correspondants. Les fichiers peuvent tre tlchargs du
site internet du fabricant.
Condition Aucun projet n'est ouvert.
pralable
Procdure 1. Slectionner la squence de menus Fichier > Import / Export.
La fentre Assistant Import / Export s'ouvre.
2. Slectionner Importer le fichier de description des appareils et cliquer
sur Suite >.
3. Cliquer sur Recherche... et indiquer un rpertoire.
4. Slectionner le format de fichier EtherCAT ESI.
5. Marquer le fichier et cliquer sur Ouvrir.
6. Confirmer avec Suite >.
Une liste des appareils importer est affiche.
7. Cliquer sur Terminer.
Les appareils sont imports.
8. Fermer la fentre Assistant Import / Export.
Avec les fichiers de description d'appareils comprenant une rf-
rence d'autres fichiers, seul le fichier contenant les rfrences doit
tre import. Les fichiers auxquels se rfrent les rfrences sont im-
ports automatiquement. Tous les fichiers doivent se trouver dans le mme
rpertoire. Si un fichier n'a pas pu tre trouv, cela est signal par un mes-
sage.
4.3 Saisie de l'adresse IP de KUKA Line Interface
Description Afin de pouvoir excuter des fonctions en ligne (p. ex. scan de bus, diagnos-
tic), il est ncessaire de saisir l'adresse IP de la KLI.
Procdure 1. Dans la fentre Structure du projet et l'onglet Appareils, cliquer droite
sur l'entre KUKA Extension Bus (SYS-X44).
2. Dans le menu contextuel, slectionner Rglages.... La fentre R-
glages... s'ouvre.
3. Slectionner l'onglet Rglages Matre.
4. Entrer l'adresse IP de la KLI et confirmer avec OK.
4.4 Insrer manuellement des appareils
Condition La commande de robot est ajoute et active.
pralable
Procdure 1. Dans la fentre Structure du projet et l'onglet Appareils, ouvrir l'arbores-
cence du contrleur de robot.
2. Cliquer droite sur Structure de bus et slectionner Ajouter... dans le
menu contextuel.
3. Une fentre s'ouvre. Marquer l'entre KUKA Extension Bus (SYS-X44)
et confirmer avec OK. L'entre est reprise dans l'arborescence.
4. Ouvir l'arborescence le plus possible. Cliquer droite sur EtherCAT et s-
lectionner Ajouter... dans le menu contextuel. Une fentre s'ouvre.
5. Si on souhaite ajouter un participant de bus : Continuer avec l'opration 6.
12 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
4 Configuration
Si ou souhaite ajouter un coupleur de bus : marquer le coupleur de bus (p.
ex. coupleur EtherCAT EK1100 (2A bus E) et confirmer avec OK. Le
coupleur de bus est repris dans l'arborescence.
Un coupleur de bus permet d'insrer d'autres modules (p. ex. des
bornes d'entre ou de sortie, des passerelles, etc.).
6. Marquer l'appareil EtherCAT utilis et confirmer avec OK. L'appareil est
repris dans l'arborescence.
7. Si on souhaite insrer d'autres appareils, rpter les oprations 4 6 pour
ces appareils.
4.5 Insrer des appareils automatiquement (scan de bus)
Description Les participants de bus peuvent tre insrs automatiquement. Pour ce faire,
l'utilisateur doit lancer une recherche dans WorkVisual. Cette recherche doit
dfinir quels appareils sont relis au bus rel. Les appareils correspondants
sont alors insrs automatiquement dans la structure de bus de WorkVisual.
Avant de lancer la recherche, le bus doit comprendre au moins un participant
de bus pour pouvoir tre dmarr dans le mode correct (PreOp).
Condition L'adresse IP de KUKA Line Interface est indique.
pralable (>>> 4.3 "Saisie de l'adresse IP de KUKA Line Interface" Page 12)
Le contrleur de robot est activ.
Connexion rseau avec le contrleur de robot rel
Les appareils du contrleur de robot rel sont connects.
Un participant de bus est insr dans le bus.
(>>> 4.4 "Insrer manuellement des appareils" Page 12)
Procdure 1. Dans la fentre Structure du projet et l'onglet Appareils, ouvrir l'arbores-
cence du contrleur de robot.
2. Dans l'arborescence, cliquer droite sur l'entre KUKA Extension Bus
(SYS-X44) et slectionner Relier dans le menu contextuel. La liaison est
tablie.
3. Cliquer droite sur l'entre KUKA Extension Bus (SYS-X44) et slec-
tionner Scan topologie... dans le menu contextuel. La fentre Assistant
du scan de topologie s'ouvre.
4. Cliquer sur Suite > afin de lancer la recherche. Une fois la recherche ter-
mine, WorkVisual affiche tous les appareils trouvs, gauche dans la fe-
ntre. Chaque appareil est reprsent par un nombre (= code de produit).
5. Marquer un appareil. A droite dans la fentre, WorkVisual affiche une liste
des fichiers de description d'appareils ayant le mme code de produit. En
rgle gnrale, il s'agit de diffrentes versions du mme fichier de descrip-
tion d'appareil.
6. Si la liste contient plusieurs fichiers de description d'appareils, faire dfiler
la liste et vrifier si le fichier de l'appareil utilis est marqu. Si un autre
fichier est marqu, slectionner l'option Slection manuelle et marquer le
fichier correct.
7. Rpter les oprations 5 6 pour tous les appareils affichs.
8. Cliquer sur Suite > afin de confirmer l'affectation.
9. Cliquer sur Terminer afin d'affecter les appareils.
10. Uniquement pour les appareils bass sur des slots :
a. Transfrer le projet sur le contrleur de robot.
b. Excuter nouveau les oprations 3 et 4. Une fois la recherche termi-
ne, WorkVisual affiche tous les modules de l'appareil trouvs,
gauche dans la fentre.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 13 / 39
KR C4 EtherCAT
c. Cliquer sur Terminer. Les modules se trouvent prsent dans l'onglet
Modules.
4.6 Configuration d'appareils
Condition Le contrleur de robot est ajout et activ.
pralable Les appareils sont insrs dans le bus.
Procdure 1. Dans la fentre Structure du projet et l'onglet Appareils, ouvrir l'arbores-
cence du contrleur de robot.
2. Cliquer droite sur l'appareil et slectionner Rglages... dans le menu
contextuel. Une fentre avec les rglages des appareils s'ouvre.
3. Procder aux rglages souhaits dans l'onglet Gnralits.
(>>> 4.6.1 "Onglet Gnralits" Page 14)
4. Si l'onglet Horloges divises est prsent, on pourra crer un profil pour
des horloges distribues ici. Il est recommand de dsactiver les horloges
distribues.
5. Procder aux rglages souhaits dans l'onglet Objets de donnes de
processus.
(>>> 4.6.2 "Onglet Objets de donnes de processus" Page 15)
6. Si l'onglet Modules est prsent, modifier les paramtres souhaits.
(>>> 4.6.3 "Onglet Modules" Page 16)
7. Sauvegarder les rglages avec OK.
4.6.1 Onglet Gnralits
Fig. 4-1: Onglet Gnralits
Adresses
Champ Description
Adresse EtherCAT L'adresse EtherCAT est attribue automatique-
ment. L'adresse peut tre modifie dans l'diteur
de topologie.
Alias EtherCAT Adresse alias pour appareils dcouplables, p.
ex. EMD
L'adresse alias est ncessaire pour coupler ou
dcoupler des appareils dcouplables pendant
le service.
14 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
4 Configuration
Identification de
Champ Description
l'appareil
Contrle l'ID du fabri- Case coche : L'ID de fabricant est contrle
cant pendant le dmarrage de l'appareil.
Case non coche : l'ID de fabricant n'est pas
contrle.
Contrle du numro Case coche : le numro de produit est
de produit contrl pendant le dmarrage de l'appareil.
Case non coche : le numro de produit
n'est pas contrl.
Vrifie le numro de Processus avec lequel le numro de rvision de
rvision l'appareil est contrl. Les numros de rvision
pouvant tre slectionns dpendent de l'appa-
reil.
OFF : le numro de rvision n'est pas contr-
l.
EQ : il y a contrle de concordance du num-
ro de rvision.
LW_EQ : il y a contrle de concordance des
16 bits les plus faibles avec le numro de r-
vision.
Le rglage par dfaut est lu dans le fichier de
description d'appareil.
Contrle le numro Case coche : le numro de srie est contr-
de srie l pendant le dmarrage de l'appareil.
Case non coche : le numro de srie n'est
pas contrl.
Numro de srie Si on souhaite que le numro de srie soit
contrl, saisir le numro de srie de l'appareil.
4.6.2 Onglet Objets de donnes de processus
Fig. 4-2: Onglet Objets de donnes de processus (exemple)
Champ Description
Utiliser Case coche : l'objet de donnes de processus est
utilis.
Case non coche : l'objet de donnes de processus
n'est pas utilis.
SM Un autre gestionnaire Sync peut tre attribu l'objet de
donnes de processus.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 15 / 39
KR C4 EtherCAT
Les rglages dans cet onglet dpendent de l'appareil utilis. Des in-
formations supplmentaires concernant les rglages sont fournies
dans la documentation du fabricant de l'appareil.
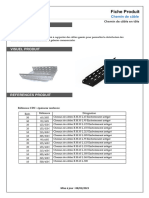
4.6.3 Onglet Modules
Fig. 4-3: Onglet Modules (exemple)
Pos. Description
1 Slots de l'appareil
Le nombre de slots affichs dpend de l'appareil slectionn. Le
nombre maximum possible de slots pour l'appareil en question est
toujours affich.
Il y a 2 possibilits d'ajouter un module un slot :
Slectionner le groupe souhait dans la fentre de modules.
Dans le groupe, saisir le module souhait et le tirer sur un slot
compatible avec la fonction glisser et dplacer. Les slots com-
patibles sortent sur fond orange lorsque le module est marqu.
Ajouter un module au prochain slot libre. Slectionner le
groupe souhait dans la fentre de modules et double-cliquer
sur le module souhait.
2 Fentre de paramtres
Affiche les paramtres spcifiques aux modules. Les valeurs des
paramtres peuvent tre modifies.
3 Champ de recherche
Le champ de recherche permet de chercher des modules. La
recherche est une recherche plein texte.
4 Fentre de modules
Les modules sont diviss en groupes.
5 Description du module
Dcrit le type de module et ses caractristiques.
6 Description du paramtre
Dcrit les paramtres rglables dans la fentre de paramtres.
16 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
4 Configuration
Pour les appareils n'tant pas bass sur des slots, seules la fentre
de paramtres et la description des paramtres sont affiches.
Les paramtres dans cet onglet dpendent de l'appareil utilis. Des
informations supplmentaires concernant les paramtres sont four-
nies dans la documentation du fabricant de l'appareil.
4.7 Configuration de File Access over EtherCAT
Description File Access over EtherCAT permet de tlcharger les fichiers d'un appareil ou
de les sauvegarder sur un appareil.
Condition L'appareil autorise la fonction File Access over EtherCAT.
pralable L'appareil est connect et actif.
Procdure 1. Dans la fentre Structure du projet et l'onglet Appareils, ouvrir l'arbores-
chargement cence du contrleur de robot.
2. Cliquer droite sur l'appareil et slectionner Relier dans le menu contex-
tuel. La liaison avec l'appareil est tablie.
3. Cliquer droite sur l'appareil et slectionner Fonctions > Charger le fi-
chier dans le menu contextuel.
4. Une fentre s'ouvre. Naviguer vers le lieu de sauvegarde du fichier devant
tre charg de l'appareil.
5. Saisir un nom et cliquer sur Sauvegarder.
Procdure Sauve- 1. Dans la fentre Structure du projet et l'onglet Appareils, ouvrir l'arbores-
garder cence du contrleur de robot.
2. Cliquer droite sur l'appareil et slectionner Relier dans le menu contex-
tuel. La liaison avec l'appareil est tablie.
3. Cliquer droite sur l'appareil et slectionner Fonctions > Tlcharger le
fichier dans le menu contextuel.
4. Une fentre s'ouvre. Naviguer vers le lieu de sauvegarde du fichier devant
tre sauvegard sur l'appareil.
5. Marquer le fichier et cliquer sur Sauvegarder.
4.8 Contrle et modification de la topologie
Description Si des appareils sont insrs dans le bus, WorkVisual relie les appareils auto-
matiquement. WorkVisual ne connaissant pas la structure de bus relle, il faut
vrifier que les liaisons concordent avec la structure de bus relle. Si ce n'est
pas le cas, les liaisons doivent tre modifies en consquence. En cas de mo-
difications ultrieures de la structure de bus, la topologie ne change pas. C'est
pourquoi, dans ce cas galement, il faut vrifier que les liaisons concordent.
Procdure 1. Dans la fentre Structure du projet et l'onglet Appareils, cliquer droite
sur l'entre KUKA Extension Bus (SYS-X44).
2. Dans le menu contextuel, slectionner Rglages.... La fentre R-
glages... s'ouvre.
3. Slectionner l'onglet Topologie.
(>>> 4.8.1 "Onglet Topologie" Page 18)
4. Procder aux modifications souhaites :
Effacer des liaisons incorrectes : cliquer droite sur la liaison et slec-
tionner Effacer.
En alternative, marquer la liaison et appuyer sur la touche Suppr.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 17 / 39
KR C4 EtherCAT
Insrer des liaisons manquantes : cliquer sur une liaison et maintenir
la touche de souris enfonce. Tirer le pointeur de la souris sur une
autre liaison et lcher la touche de la souris.
disposer les appareils de faon diffrente avec la fonction glisser et
dplacer. Ceci permet d'obtenir un aperu dans l'onglet Topologie.
Ceci n'a aucun effet sur le bus.
5. Cliquer sur OK.
4.8.1 Onglet Topologie
Fig. 4-4: Onglet Topologie (exemple)
Pos. Description
1 Liaison permanente
Une ligne continue reprsente une liaison permanente entre 2 ap-
pareils.
2 Liaison dcouplable
Une ligne en pointills reprsente une liaison dcouplable entre 2
appareils.
3 Port
Chaque appareil peut avoir jusqu' 4 ports. Le port A dsigne
l'entre. Le nombre et la dsignation des sorties (ports B, C et D)
dpendent du type de construction de l'appareil. L'entre de
chaque appareil doit tre relie avec la sortie de l'appareil se trou-
vant un niveau plus haut dans l'arborescence.
Dans chaque systme de bus, il y a un appareil n'ayant pas
d'entre (p. ex. le contrleur de robot). Cet appareil est le nud
racine de l'entit de bus. Chaque appareil doit tre reli avec le
nud racine via la chane des appareils se trouvant un niveau
plus haut dans l'arborescence.
Une sortie ne peut tre relie qu'avec une entre. Des dpen-
dances cycliques ne sont pas possibles.
18 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
4 Configuration
Pos. Description
4 Appareil
Chaque appareil dans le bus est reprsent par un rectangle. Les
numros des appareils indiquent leur adresse physique.
5 Proprits
La fentre affiche les proprits de l'appareil marqu, par ex.
l'adresse et l'adresse alias. Les proprits peuvent tre modifies
en partie.
6 Zone de messages
La zone des messages indique si un appareil a une adresse ou
une adresse alias incorrecte.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 19 / 39
KR C4 EtherCAT
20 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
5 Diagnostic
5 Diagnostic
5.1
s
t
Affichage des donnes de diagnostic
Les donnes de diagnostic peuvent tre galement affiches dans
WorkVisual. Pour tout complment d'informations concernant les s-
quences d'opration effectuer dans WorkVisual, veuillez consulter
la documentation de WorkVisual.
Procdure 1. Dans le menu principal, slectionner Diagnostic > Moniteur de diagnos-
tic.
2. Slectionner le module souhait dans le champ Module.
Les donnes de diagnostic concernant le module slectionn sont affi-
ches.
Description Les donnes de diagnostic concernant les modules suivants peuvent tre af-
fiches :
KUKA Extension Bus (SYS-X44)
5.1.1 KUKA Extension Bus (SYS-X44)
Nom Description
Matre OK Etat de l'ensemble d'EtherCAT MasterStack
OK : les Matres et Esclaves EtherCAT sont OK.
ERROR : dfaut dans l'exploitation EtherCAT
Etat actuel du Matre Mode actuel du Matre
Init : l'Esclave EtherCAT est initialis. L'Esclave Ether-
CAT se trouve dans cet tat aprs l'activation.
PreOP : la communication avec la bote mail est pos-
sible, la communication des donnes de processus n'est
pas encore possible.
BootStrap : une mise jour du micrologiciel de l'Es-
clave EtherCAT est possible.
SafeOP : la communication avec la bote mail et des
donnes de processus est possible, cependant, les sor-
ties Esclaves EtherCAT ne sont pas encore en tat sr.
Les donnes de saisie sont dj actualises de faon
cyclique.
OPERATIONAL : l'Esclave EtherCAT copie les don-
nes de sortie du Matre EtherCAT sur ses sorties. La
communication des donnes de processus et avec la
bote mail est possible.
Unknown : l'tat du Matre EtherCAT est inconnu.
Esclaves dans l'tat demand OK : Tous les modules Esclaves EtherCAT ont atteint
l'tat demand par le Matre EtherCAT.
ERROR : tous les modules Esclaves EtherCAT n'ont
pas atteint l'tat demand par le Matre EtherCAT.
Matre dans l'tat demand OK : Le Matre EtherCAT a atteint l'tat demand.
ERROR : le Matre EtherCAT ne se trouve pas dans
l'tat demand.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 21 / 39
KR C4 EtherCAT
Nom Description
Le Matre reconnat la connexion OK : Il y a une connexion rseau entre la carte rseau
rseau du Matre EtherCAT et le 1er Esclave EtherCAT.
ERROR : la connexion rseau entre le Matre EtherCAT
et le 1er Esclave EtherCAT a t coupe.
Nombre d'Esclaves trouvs Nombre d'Esclaves EtherCAT dtects par le Matre Ether-
CAT.
Nombre d'Esclaves ECat configu- Nombre d'Esclaves EtherCAT ayant t configurs
rs
Nombre de Tx-Frames Nombre de tlgrammes EtherCAT envoys par le rseau
Nombre de Rx-Frames Nombre de tlgrammes EtherCAT reus par le rseau
Nombre de frames perdus Nombre de tlgrammes EtherCAT ayant t perdus
Compteur : Rponse pas livre Nombre de tlgrammes EtherCAT n'ayant pas t reus
temps temps
Compteur : Rponse pas livre Nombre de tlgrammes EtherCAT n'ayant pas t reus
temps plusieurs fois temps plusieurs fois directement les uns aprs les autres.
Compteur : Les esclaves ne sont Compteur pour les cycles de bus dans lesquels tous les
pas tous en tat OP Esclaves EtherCAT n'taient pas en tat OPERATIONAL.
Compteur : Dfaut Stack Nombre de dfauts de bus
Compteur : Stack Restarts aprs Nombre de redmarrages de bus effectus avec succs
dfaut aprs un dfaut de bus.
Temps Send-To-Send actuel (s) Temps actuel entre 2 appels d'envoi de tlgrammes Ether-
CAT
Exemple : 4000 s
Temps Receive-To-Receive actuel Temps actuel entre 2 appels de rception de tlgrammes
(s) EtherCAT
Exemple : 4000 s
Temps Send-To-Send maximum Temps maximum entre 2 appels d'envoi de tlgrammes
(s) EtherCAT
Exemple : 6000 s
Temps Recv-To-Recv maximum Temps maximum entre 2 appels de rception de tl-
(s) grammes EtherCAT
Exemple : 8000 s
Link-Layer : Nom d'interface Nom de l'interface de rseau pour l'entit Stack
Exemple : virtual4
5.2 Diagnostic d'appareils
Condition L'adresse IP de KUKA Line Interface est indique.
pralable (>>> 4.3 "Saisie de l'adresse IP de KUKA Line Interface" Page 12)
L'appareil est connect et actif.
Procdure 1. Dans la fentre Structure du projet et l'onglet Appareils, ouvrir l'arbores-
cence du contrleur de robot.
2. Dans l'arborescence, cliquer droite sur l'entre KUKA Extension Bus
(SYS-X44) et slectionner Relier dans le menu contextuel.
3. Rpter l'tape 2 avec le coupleur de bus, la passerelle et/ou l'appareil.
4. Cliquer droite sur la passerelle ou l'appareil et slectionner Diagnostic...
dans le menu contextuel. La fentre CANopen over EtherCAT s'ouvre.
Description Les objets de donnes de service (SDO) sont affichs dans la fentre CANo-
pen over EtherCAT. Ces donnes forment le canal de communication pour
22 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
5 Diagnostic
la transmission de paramtres sur un appareil (p. ex. programmation de la r-
solution de capteur). Les paramtres sont spcifiques l'appareil. Des infor-
mations supplmentaires ce sujet sont fournies dans la documentation du
fabricant de l'appareil.
Les paramtres ont dj au moins les proprits suivantes :
Proprits Description
Numro d'index Ceci sert l'identification sans quivoque de tous les
paramtres. Le numro d'index est divis en un index
principal et un sous-index (exemple : 1018:05). L'index
principal se trouve avant les deux-points, le sous-index
aprs les deux-points.
Nom Texte comprhensible auto-explicatif
Valeur Peut tre un texte, un nombre ou un autre index de
paramtres
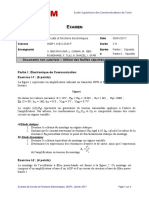
Lorsque la fentre CANopen over EtherCAT est ouverte, seuls les index prin-
cipaux sont affichs. En cliquant sur Actualiser, les sous-index sont chargs
et affichs.
Fig. 5-1: Fentre CANopen over EtherCAT (exemple)
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 23 / 39
KR C4 EtherCAT
24 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
6 Messages
6 Messages
s
s
N Message Cause / Remde
13008 <{Nom de l'entit}> Dfaut de Cause : le dfaut de bus n'a pas pu tre localis.
bus Ethercat. {Paramtres sup-
Remde : redmarrer le contrleur de robot.
plmentaires} {Paramtres sup-
plmentaires}
13011 <{ID bus}> Dfaut lors de la lec- Cause : le fichier de configuration ncessaire pour
ture du fichier de configuration l'initialisation de l'entit de bus n'existe pas.
[{Nom du fichier XML}]
Remde :
Si le fichier de configuration est un fichier du r-
pertoire USER : retransfrer le projet WorkVi-
sual.
Si le fichier de configuration est un fichier sys-
tme : effectuer une nouvelle installation du logi-
ciel KUKA System Software.
13012 <{ID bus}> Dfaut lors de l'initiali- Remarque : les causes possibles sont dcrites
sation ECat-Stack [{Cause} dans le tableau ci-aprs.
{Cause 2}]
13013 <ECat> Dfaut lors de la cration Cause : dfaut interne
d'entits ECat-Stack.
Remde : contacter KUKA Roboter GmbH
(>>> 7 "SAV KUKA" Page 29).
13015 <{ID bus}> Dfaut de scan de Cause : dans la configuration, l'appareil nomm est
bus Ethercat. Appareil: {Mauvais diffrent de l'appareil rellement connect.
appareil} [{Info supplmentaire}]
Remde : dans la configuration, vrifier que l'appa-
reil configur concorde avec l'appareil rellement
connect. Si les appareils sont diffrents, corriger la
configuration.
Cause : l'appareil nomm est connect au mauvais
port.
Remde : connecter l'appareil au port correct.
13016 <{ID bus}> Pas de rception de Cause : la dure de cycle de bus est trop courte.
Frames de rseau [{Dtails}]
Remde : augmenter la dure de cycle de bus.
Cause : les appareils configurs sont diffrents des
appareils rellement connects.
Remde : dans la configuration, vrifier que le
nombre et le type des appareils configurs concor-
dent avec les appareils rellement connects. Si
les appareils sont diffrents, corriger la configura-
tion.
Cause : les appareils sont connects aux mauvaix
ports.
Remde : connecter les appareils aux ports cor-
rects.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 25 / 39
KR C4 EtherCAT
N Message Cause / Remde
13018 <{ID bus}> Dfaut lors de l'initiali- Cause : dans la configuration, l'appareil nomm est
sation ECat-Stack. Appareil: diffrent de l'appareil rellement connect.
{Appareil dfectueux} [{Informa-
Remde : dans la configuration, vrifier que l'appa-
tions supplmentaires}]
reil configur concorde avec l'appareil rellement
connect. Si les appareils sont diffrents, corriger la
configuration.
Cause : la configuration de bus est errone.
Remde :
1. Contrler et corriger la configuration de bus.
2. Transfrer nouveau le projet WorkVisual.
13020 <{ID bus}> Dfaut de bus Ether- Cause : dans la configuration, l'appareil nomm est
cat. Appareil: {Dtails} [{Dtails}] diffrent de l'appareil rellement connect.
Remde : dans la configuration, vrifier que l'appa-
reil configur concorde avec l'appareil rellement
connect. Si les appareils sont diffrents, corriger la
configuration.
Cause : l'appareil nomm est connect au mauvais
port.
Remde : connecter l'appareil au port correct.
13021 <{ID bus}> Dfaut de rseau Cause : le cble rseau n'est pas connect ou est
Ethercat. {Dtails} [{Dtails}] dfectueux.
Remde : connecter ou remplacer le cble rseau.
Cause : la configuration de rseau est errone.
Remde : contrler et corriger la configuration de
rseau.
Cause : la carte rseau est dfectueuse.
Remde : remplacer la carte rseau.
Cause : la carte Cabinet Interface Board est dfec-
tueuse.
Remde : remplacer la carte Cabinet Interface
Board.
13068 <{Entit de bus}> Le participant Cause : l'appareil nomm n'est pas connect.
EtherCAT {Nom de l'appareil}
Remde : connecter l'appareil.
n'est pas reli au bus.
Cause : la configuration de bus est errone.
Remde :
1. Contrler et corriger la configuration de bus.
2. Transfrer nouveau le projet WorkVisual.
13080 <{Entit de bus}> Appareil Ether- Cause : dans la configuration, l'appareil nomm est
cat: {Nom de l'appareil} ne peut diffrent de l'appareil rellement connect.
pas tre lanc. {2}
Remde : dans la configuration, vrifier que l'appa-
reil configur concorde avec l'appareil rellement
connect. Si les appareils sont diffrents, corriger la
configuration. Si les appareils ne sont pas diff-
rents, remplacer l'appareil.
Cause : l'appareil nomm est dfectueux.
Remde : remplacer l'appareil nomm.
Raisons
26 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
6 Messages
Raison Cause Remde
CreateSubInstance() Dfaut interne contacter KUKA Roboter GmbH
(>>> 7 "SAV KUKA" Page 29).
Nom du fichier de configura- Le fichier de configuration Transfrer nouveau le projet
tion nomm manque. WorkVisual.
internal error Dfaut interne contacter KUKA Roboter GmbH
(>>> 7 "SAV KUKA" Page 29).
ExtClockInit() Dfaut dans la tche contacter KUKA Roboter GmbH
d'EtherCAT (>>> 7 "SAV KUKA" Page 29).
CreateEcatInitConfig() Dfaut lors de l'initialisation contacter KUKA Roboter GmbH
(>>> 7 "SAV KUKA" Page 29).
emInitMaster() Les paramtres systme Effectuer une nouvelle installation
sont mal dfinis. de KUKA System Software.
isNetworkLinkConnected() La cble rseau n'est pas Connecter le cble rseau.
connect.
Le 1er esclave EtherCAT Remplacer le 1er Esclave Ether-
est dfectueux. CAT.
La carte Cabinet Interface Remplacer la carte Cabinet Inter-
Board est dfectueuse. face Board.
startEcatWrapperClock- La tche Clock n'a pas pu contacter KUKA Roboter GmbH
Task() tre lance. (>>> 7 "SAV KUKA" Page 29).
ENI-File Error Le fichier de configuration Transfrer nouveau le projet
pour les appareils Ether- WorkVisual.
CAT manque.
emConfigureMaster() La configuration du Matre 1. Contrler et corriger la configu-
EtherCAT est errone. ration de bus.
2. Transfrer nouveau le projet
WorkVisual.
registerPDMemProvider() Dfaut interne dans l'enre- contacter KUKA Roboter GmbH
getProcessDataInBuffer() gistrement des donnes de (>>> 7 "SAV KUKA" Page 29).
processus
getProcessDataOutBuffer()
registerEcatDataProvider()
registerEcatNotify()
setDCConfig() La configuration des hor- Contrler et corriger la configura-
loges distribues est erro- tion des horloges distribues.
ne.
NetworkResponse() Les appareils configurs Dans la configuration, vrifier que
sont diffrents des appa- le nombre et le type des appareils
reils rellement connects. configurs concordent avec les
appareils rellement connects. Si
les appareils sont diffrents, corri-
ger la configuration.
Les appareils sont connec- Connecter les appareils aux ports
ts aux mauvaix ports. corrects.
setMasterMode(INIT) Les appareils ne peuvent Reconfigurer le driver E/S.
pas tre initialiss.
Ou bien :
1. Contrler et corriger la configu-
ration de bus.
2. Transfrer nouveau le projet
WorkVisual.
setMbxTferOpt() Dfaut interne dans la contacter KUKA Roboter GmbH
configuration de l'accs la (>>> 7 "SAV KUKA" Page 29).
bote mail.
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 27 / 39
KR C4 EtherCAT
Raison Cause Remde
GetSlaveInfo() Les appareils configurs Dans la configuration, vrifier que
sont diffrents des appa- le nombre et le type des appareils
reils rellement connects. configurs concordent avec les
appareils rellement connects. Si
les appareils sont diffrents, corri-
ger la configuration.
Les appareils sont connec- Connecter les appareils aux ports
ts aux mauvaix ports. corrects.
SetMasterMode(OPERA- La configuration de bus est 1. Contrler et corriger la configu-
TIONAL) errone. ration de bus.
2. Transfrer nouveau le projet
WorkVisual.
28 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
7 SAV KUKA
7 SAV KUKA
A
7.1
A
Demande d'assistance
Introduction Cette documentation comprenant des informations relatives au service et la
commande vous fera office d'aide lors de l'limination de dfauts. Votre filiale
locale est votre disposition pour tout complment d'information ou toute de-
mande supplmentaire.
Informations Pour traiter toute demande SAV, nous ncessitons les informations sui-
vantes :
Description du problme, y compris indications relatives la dure et la
frquence du dfaut
Des informations aussi compltes que possibles sur les composants ma-
triels et logiciels du systme complet
La liste suivante donne des repres sur les informations qui sont souvent
importantes :
Type et numro de srie de la cinmatique, p. ex. du manipulateur
Type et numro de srie du contrleur
Type et numro de srie de l'alimentation en nergie
Dsignation et version du logiciel System Software
Dsignations et versions d'autres composants logiciels ou de modifi-
cations
Pack de diagnostic KrcDiag
En supplment pour KUKA Sunrise : projets existants, applications
comprises
Pour des versions de KUKA System Software antrieures V8 : ar-
chives du logiciel (KrcDiag n'est pas encore disponible ici.)
Application existante
Axes supplmentaires existants
7.2 Assistance client KUKA
Disponibilit Notre assistance client KUKA est disponible dans de nombreux pays. Nous
sommes votre disposition pour toute question.
Argentine Ruben Costantini S.A. (agence)
Luis Angel Huergo 13 20
Parque Industrial
2400 San Francisco (CBA)
Argentine
Tl. +54 3564 421033
Fax +54 3564 428877
ventas@costantini-sa.com
Australie KUKA Robotics Australia Pty Ltd
45 Fennell Street
Port Melbourne VIC 3207
Australie
Tl. +61 3 9939 9656
info@kuka-robotics.com.au
www.kuka-robotics.com.au
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 29 / 39
KR C4 EtherCAT
Belgique KUKA Automatisering + Robots N.V.
Centrum Zuid 1031
3530 Houthalen
Belgique
Tl. +32 11 516160
Fax +32 11 526794
info@kuka.be
www.kuka.be
Brsil KUKA Roboter do Brasil Ltda.
Travessa Claudio Armando, n 171
Bloco 5 - Galpes 51/52
Bairro Assuno
CEP 09861-7630 So Bernardo do Campo - SP
Brsil
Tl. +55 11 4942-8299
Fax +55 11 2201-7883
info@kuka-roboter.com.br
www.kuka-roboter.com.br
Chili Robotec S.A. (agence)
Santiago de Chile
Chili
Tl. +56 2 331-5951
Fax +56 2 331-5952
robotec@robotec.cl
www.robotec.cl
Chine KUKA Robotics Chine Co., Ltd.
No. 889 Kungang Road
Xiaokunshan Town
Songjiang District
201614 Shanghai
P. R. de Chine
Tl. +86 21 5707 2688
Fax +86 21 5707 2603
info@kuka-robotics.cn
www.kuka-robotics.com
Allemagne KUKA Roboter GmbH
Zugspitzstr. 140
86165 Augsburg
Allemagne
Tl. +49 821 797-4000
Fax +49 821 797-1616
info@kuka-roboter.de
www.kuka-roboter.de
30 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
7 SAV KUKA
France KUKA Automatisme + Robotique SAS
Techvalle
6, Avenue du Parc
91140 Villebon S/Yvette
France
Tl. +33 1 6931660-0
Fax +33 1 6931660-1
commercial@kuka.fr
www.kuka.fr
Inde KUKA Robotics India Pvt. Ltd.
Office Number-7, German Centre,
Level 12, Building No. - 9B
DLF Cyber City Phase III
122 002 Gurgaon
Haryana
Inde
Tl. +91 124 4635774
Fax +91 124 4635773
info@kuka.in
www.kuka.in
Italie KUKA Roboter Italia S.p.A.
Via Pavia 9/a - int.6
10098 Rivoli (TO)
Italie
Tl. +39 011 959-5013
Fax +39 011 959-5141
kuka@kuka.it
www.kuka.it
Japon KUKA Robotics Japan K.K.
YBP Technical Center
134 Godo-cho, Hodogaya-ku
Yokohama, Kanagawa
240 0005
Japon
Tl. +81 45 744 7691
Fax +81 45 744 7696
info@kuka.co.jp
Canada KUKA Robotics Canada Ltd.
6710 Maritz Drive - Unit 4
Mississauga
L5W 0A1
Ontario
Canada
Tl. +1 905 670-8600
Fax +1 905 670-8604
info@kukarobotics.com
www.kuka-robotics.com/canada
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 31 / 39
KR C4 EtherCAT
Core KUKA Robotics Korea Co. Ltd.
RIT Center 306, Gyeonggi Technopark
1271-11 Sa 3-dong, Sangnok-gu
Ansan City, Gyeonggi Do
426-901
Core
Tl. +82 31 501-1451
Fax +82 31 501-1461
info@kukakorea.com
Malaisie KUKA Robot Automation (M) Sdn Bhd
South East Asia Regional Office
No. 7, Jalan TPP 6/6
Taman Perindustrian Puchong
47100 Puchong
Selangor
Malaisie
Tl. +60 (03) 8063-1792
Fax +60 (03) 8060-7386
info@kuka.com.my
Mexique KUKA de Mxico S. de R.L. de C.V.
Progreso #8
Col. Centro Industrial Puente de Vigas
Tlalnepantla de Baz
54020 Estado de Mxico
Mexique
Tl. +52 55 5203-8407
Fax +52 55 5203-8148
info@kuka.com.mx
www.kuka-robotics.com/mexico
Norvge KUKA Sveiseanlegg + Roboter
Sentrumsvegen 5
2867 Hov
Norvge
Tl. +47 61 18 91 30
Fax +47 61 18 62 00
info@kuka.no
Autriche KUKA Roboter CEE GmbH
Gruberstrae 2-4
4020 Linz
Autriche
Tl. +43 7 32 78 47 52
Fax +43 7 32 79 38 80
office@kuka-roboter.at
www.kuka.at
32 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
7 SAV KUKA
Pologne KUKA Roboter Austria GmbH
Spka z ograniczon odpowiedzialnoci
Oddzia w Polsce
Ul. Porcelanowa 10
40-246 Katowice
Pologne
Tl. +48 327 30 32 13 or -14
Fax +48 327 30 32 26
ServicePL@kuka-roboter.de
Portugal KUKA Sistemas de Automatizacin S.A.
Rua do Alto da Guerra n 50
Armazm 04
2910 011 Setbal
Portugal
Tl. +351 265 729780
Fax +351 265 729782
kuka@mail.telepac.pt
Russie KUKA Robotics RUS
Werbnaja ul. 8A
107143 Moskau
Russie
Tl. +7 495 781-31-20
Fax +7 495 781-31-19
info@kuka-robotics.ru
www.kuka-robotics.ru
Sude KUKA Svetsanlggningar + Robotar AB
A. Odhners gata 15
421 30 Vstra Frlunda
Sude
Tl. +46 31 7266-200
Fax +46 31 7266-201
info@kuka.se
Suisse KUKA Roboter Schweiz AG
Industriestr. 9
5432 Neuenhof
Suisse
Tl. +41 44 74490-90
Fax +41 44 74490-91
info@kuka-roboter.ch
www.kuka-roboter.ch
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 33 / 39
KR C4 EtherCAT
Espagne KUKA Robots IBRICA, S.A.
Pol. Industrial
Torrent de la Pastera
Carrer del Bages s/n
08800 Vilanova i la Geltr (Barcelona)
Espagne
Tl. +34 93 8142-353
Fax +34 93 8142-950
Comercial@kuka-e.com
www.kuka-e.com
Afrique du Sud Jendamark Automation LTD (agence))
76a York Road
North End
6000 Port Elizabeth
Afrique du Sud
Tl. +27 41 391 4700
Fax +27 41 373 3869
www.jendamark.co.za
Tawan KUKA Robot Automation Taiwan Co., Ltd.
No. 249 Pujong Road
Jungli City, Taoyuan County 320
Tawan, R. O. C.
Tl. +886 3 4331988
Fax +886 3 4331948
info@kuka.com.tw
www.kuka.com.tw
Thalande KUKA Robot Automation (M) Sdn Bhd
Thailand Office
c/o Maccall System Co. Ltd.
49/9-10 Soi Kingkaew 30 Kingkaew Road
Tt. Rachatheva, A. Bangpli
Samutprakarn
10540 Thalande
Tl. +66 2 7502737
Fax +66 2 6612355
atika@ji-net.com
www.kuka-roboter.de
Rpublique TchqueKUKA Roboter Austria GmbH
Organisation Tschechien und Slowakei
Sezemick 2757/2
193 00 Praha
Horn Poernice
Rpublique tchque
Tl. +420 22 62 12 27 2
Fax +420 22 62 12 27 0
support@kuka.cz
34 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
7 SAV KUKA
Hongrie KUKA Robotics Hungaria Kft.
F t 140
2335 Taksony
Hongrie
Tl. +36 24 501609
Fax +36 24 477031
info@kuka-robotics.hu
Etats-Unis KUKA Robotics Corporation
51870 Shelby Parkway
Shelby Township
48315-1787
Michigan
Etats-Unis
Tl. +1 866 873-5852
Fax +1 866 329-5852
info@kukarobotics.com
www.kukarobotics.com
Royaume-Uni KUKA Robotics UK Ltd
Great Western Street
Wednesbury West Midlands
WS10 7LL
Royaume-Uni
Tl. +44 121 505 9970
Fax +44 121 505 6589
service@kuka-robotics.co.uk
www.kuka-robotics.co.uk
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 35 / 39
KR C4 EtherCAT
36 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
Index
Index
A T
API 6 Termes utiliss 6
Appareils, configuration 14 Topologie, contrle 17
Appareils, insrer (automatiquement) 13 Topologie, modification 17
Appareils, insrer (manuellement) 12
Assistance client KUKA 29 U
Utilisation conforme aux fins prvues 8
C Utilisation, conforme aux fins prvues 8
CAN 6
Cible 5 W
Configuration 11 WorkVisual 6
D
Demande d'assistance 29
Description du produit 7
Diagnostic 21
Diagnostic d'appareils 22
Documentation, robot industriel 5
Donnes de diagnostic, affichage 21
Donnes de diagnostic, KUKA Extension Bus 21
F
Fichiers de description d'appareils, mise dispo-
sition 12
File Access over EtherCAT, configuration 17
FSoE 6
G
Gnralits (onglet) 14
I
Insrer, appareils (automatiquement) 13
Insrer, appareils (manuellement) 12
Introduction 5
K
KLI 6
M
Marques 6
Messages 25
Modules (onglet) 16
Moniteur de diagnostic (option de menu) 21
O
Objets de donnes de processus (onglet) 15
R
Remarques 5
Remarques relatives la scurit 5
S
SAV, KUKA Roboter 29
Scan de bus 13
Scanner, bus 13
Step 7 6
Scurit 9
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 37 / 39
KR C4 EtherCAT
38 / 39 Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2
KR C4 EtherCAT
Edition: 23.06.2015 Version: KR C4 EtherCAT KSS/VSS 8.2, 8.3, 8.4 V2 39 / 39
Вам также может понравиться
- Anssi-Guide-Regles de Programmation Pour Le Developpement Dapplications Securisees en Rust-V1.0Документ50 страницAnssi-Guide-Regles de Programmation Pour Le Developpement Dapplications Securisees en Rust-V1.0bolitoОценок пока нет
- Fasicule TP RobotiqueДокумент26 страницFasicule TP RobotiqueEssia NguiliОценок пока нет
- Zamet 2018 Fren ZT PDFДокумент133 страницыZamet 2018 Fren ZT PDFFrancois HumbertОценок пока нет
- 10fil Souple VJ 116MM GisbДокумент1 страница10fil Souple VJ 116MM Gisbsarl matilec lightingОценок пока нет
- Manuel Ruby Sre 302Документ31 страницаManuel Ruby Sre 302limsa6Оценок пока нет
- Fiche Produits CDC - 0Документ13 страницFiche Produits CDC - 0idriss.ouamouОценок пока нет
- Entéroplasties de Substitution Chez L'homme, Principe Et RéalisationДокумент26 страницEntéroplasties de Substitution Chez L'homme, Principe Et RéalisationMarc PagniezОценок пока нет
- Callas PdfToolbox 4 Manuel FRДокумент19 страницCallas PdfToolbox 4 Manuel FRviju_sbmОценок пока нет
- Guide Formation Starter ProgrammationДокумент32 страницыGuide Formation Starter ProgrammationPaul GuermonprezОценок пока нет
- Game Code Ur Votre Guide DeformationДокумент21 страницаGame Code Ur Votre Guide Deformationعبد الله يونسОценок пока нет
- 0303 Apprendre Langage Programmation RubyДокумент79 страниц0303 Apprendre Langage Programmation RubyOumar KOITAОценок пока нет
- Manuel KR c4 Na Ul FRДокумент205 страницManuel KR c4 Na Ul FRElbari OmarОценок пока нет
- Implants PéniensДокумент14 страницImplants PéniensMarcky EverHard PagniezОценок пока нет
- Fiche Metier AssassinДокумент1 страницаFiche Metier Assassin--Оценок пока нет
- Presentation 01Документ101 страницаPresentation 01محمد زينايОценок пока нет
- Cs GuideДокумент193 страницыCs GuideKimou HakimОценок пока нет
- Changement de Sexe Homme en FemmeДокумент19 страницChangement de Sexe Homme en FemmeMarcky EverHard PagniezОценок пока нет
- Sophocle. Oedipe RoiДокумент44 страницыSophocle. Oedipe RoioigresvaxОценок пока нет
- Guide Pratique Du Coordonnateur Des Pêches AMIKДокумент271 страницаGuide Pratique Du Coordonnateur Des Pêches AMIKRiadh ChouaibiОценок пока нет
- Atv212 ProgrammationДокумент217 страницAtv212 ProgrammationNasirОценок пока нет
- L'atelier Du Plombier 2OK PDFДокумент2 страницыL'atelier Du Plombier 2OK PDFLÂTRÉ Design Multi-Services100% (1)
- Robinetterie Industrielle - FG INOXДокумент28 страницRobinetterie Industrielle - FG INOXFGINOXОценок пока нет
- Quelles Sont Les Étapes de La Reproduction HumaineДокумент30 страницQuelles Sont Les Étapes de La Reproduction HumaineAlhassane BahОценок пока нет
- Manuel KR C4 GI FRДокумент217 страницManuel KR C4 GI FRElbari OmarОценок пока нет
- USP Compact OM ES-FR 987768 001.0318Документ42 страницыUSP Compact OM ES-FR 987768 001.0318Cuenta RandomОценок пока нет
- SIG SAUER SP 2022 Impressions Des TireursДокумент24 страницыSIG SAUER SP 2022 Impressions Des TireursNicolas MarionОценок пока нет
- Ecoflo Guide-Conception QC STPДокумент18 страницEcoflo Guide-Conception QC STPNoureddine MerahОценок пока нет
- Guide de Choix Mavil - HD2Документ2 страницыGuide de Choix Mavil - HD2Francois HumbertОценок пока нет
- Exercices Corrigés en Langage C++Документ22 страницыExercices Corrigés en Langage C++hamza AslikhОценок пока нет
- Cours Microcontrôleur Microprocesseur 41Документ28 страницCours Microcontrôleur Microprocesseur 41Philippe Diego DelasvegasОценок пока нет
- Business Internet Voix Série 2Документ33 страницыBusiness Internet Voix Série 2corentinОценок пока нет
- Introduction A L'algorithmique Et A La Programmation Avec PythonДокумент6 страницIntroduction A L'algorithmique Et A La Programmation Avec Pythonangelfree68Оценок пока нет
- Histoire Des Langages de Programmation - WikipédiaДокумент12 страницHistoire Des Langages de Programmation - WikipédiarealfondieОценок пока нет
- Python 2 LES STRUCTURES DE CONTRÔLE EN PYTHONДокумент20 страницPython 2 LES STRUCTURES DE CONTRÔLE EN PYTHONIbtihel MechleouiОценок пока нет
- Carte Gamel Trophy Guide de Mise en Oeuvre v3Документ32 страницыCarte Gamel Trophy Guide de Mise en Oeuvre v3guichguiОценок пока нет
- 75399ba7aedf1e6779650d95f7f5bf32fee445c409e78268c8c826957e9a9b4cДокумент22 страницы75399ba7aedf1e6779650d95f7f5bf32fee445c409e78268c8c826957e9a9b4cchiaki.nanami.offОценок пока нет
- Introduction Au C# - Apprenez À Développer en C# - OpenClassrooms - 1604255371414Документ9 страницIntroduction Au C# - Apprenez À Développer en C# - OpenClassrooms - 1604255371414koyabeОценок пока нет
- Scara KukaДокумент59 страницScara Kukamoura_evertonОценок пока нет
- KR C2 SR - KUKA RoboticsДокумент75 страницKR C2 SR - KUKA Roboticsamel smaili100% (1)
- Catalogue Cybergun 2020 Decupdate LowresДокумент124 страницыCatalogue Cybergun 2020 Decupdate LowresLeopoldo LopesОценок пока нет
- InfiltrationДокумент29 страницInfiltrationEdmar CardenasОценок пока нет
- Altivar 31 Guide de ProgrammationДокумент96 страницAltivar 31 Guide de ProgrammationJoyce TongОценок пока нет
- Meckelleyre 2005Документ18 страницMeckelleyre 2005ElbordjiОценок пока нет
- Chirurgie Du Col Vésical Pour Incontinence CongénitaleДокумент15 страницChirurgie Du Col Vésical Pour Incontinence CongénitaleMarc PagniezОценок пока нет
- Boitier Programmation EDF TempoДокумент4 страницыBoitier Programmation EDF TempoStéphane VuillardОценок пока нет
- Soudage Arc Kuka PDFДокумент28 страницSoudage Arc Kuka PDFrachid0% (1)
- Mérimée Prosper - CarmenДокумент42 страницыMérimée Prosper - CarmenSidou HadjОценок пока нет
- 40 Incroyables Astuces (Pour Vos PC, Mobiles, Box, TV, Baladeurs, Etc...Документ40 страниц40 Incroyables Astuces (Pour Vos PC, Mobiles, Box, TV, Baladeurs, Etc...Joop-le-philosopheОценок пока нет
- L'assassin Habite À Côté TapuscritДокумент8 страницL'assassin Habite À Côté Tapuscritantoineremondce2aОценок пока нет
- Livret de Bonne Integration Agilus2-Krc4 CompactДокумент72 страницыLivret de Bonne Integration Agilus2-Krc4 CompactAéro ClimОценок пока нет
- Bac Pro MSPCДокумент40 страницBac Pro MSPCManal QuorsaneОценок пока нет
- MCC M Hirschsprung 130820Документ61 страницаMCC M Hirschsprung 130820bo kongОценок пока нет
- KRC4-Extended - Assembly and Operation Instructions-FrДокумент103 страницыKRC4-Extended - Assembly and Operation Instructions-FrcabecavilОценок пока нет
- Creation PDFДокумент14 страницCreation PDFdustynordОценок пока нет
- Programmation AutoLISPДокумент46 страницProgrammation AutoLISPcivilappliОценок пока нет
- HYPOPHYSE 2021mesalaДокумент48 страницHYPOPHYSE 2021mesalaMohammed DocОценок пока нет
- Zamet 2018 Fren Zu PDFДокумент73 страницыZamet 2018 Fren Zu PDFFrancois HumbertОценок пока нет
- Guide Métier Développeur Web PDFДокумент22 страницыGuide Métier Développeur Web PDFImaneОценок пока нет
- KST RemoteService 12 KR C4 FRДокумент29 страницKST RemoteService 12 KR C4 FRShiya PatelОценок пока нет
- KUKA Sim 40 Installation FRДокумент33 страницыKUKA Sim 40 Installation FRGokulОценок пока нет
- TP UP-4Документ6 страницTP UP-4Adoui HanaОценок пока нет
- XP - Carte de Bouclage Réseau - Appendre LibrementДокумент7 страницXP - Carte de Bouclage Réseau - Appendre LibrementSalvador FayssalОценок пока нет
- D-306537 Power Master 33 Ins QSG FR 00Документ32 страницыD-306537 Power Master 33 Ins QSG FR 00cbochrisОценок пока нет
- UnixДокумент5 страницUnixmalak hbiyelОценок пока нет
- Groupe2 Digitalisation Des Actes Civils PDFДокумент22 страницыGroupe2 Digitalisation Des Actes Civils PDFLoïc BekomboОценок пока нет
- Electronique NumeriqueДокумент124 страницыElectronique NumeriqueAlassani moukadim100% (1)
- TD Réseau-RLI CorrigéДокумент7 страницTD Réseau-RLI CorrigéMazen TouaitiОценок пока нет
- QCM Linux - Final - ChapterДокумент7 страницQCM Linux - Final - ChapterAndry AndrianantenainaОценок пока нет
- EXAM Circuits-Fonctions-Electroniques INDP1 2016 2017Документ4 страницыEXAM Circuits-Fonctions-Electroniques INDP1 2016 2017Feki SamarОценок пока нет
- 2022 Ovelink Aal - V2Документ6 страниц2022 Ovelink Aal - V2Contact insuranceОценок пока нет
- Département MécatroniqueДокумент7 страницDépartement MécatroniqueAnas LghaziОценок пока нет
- GestimumДокумент2 страницыGestimumFabio ZuninoОценок пока нет
- Controle 5Документ6 страницControle 5عزالدين أمجاهدОценок пока нет
- Brute ForceДокумент8 страницBrute ForcenaovichОценок пока нет
- Syllabus Méthodologie Orientée Objet 2334455667 PDFДокумент118 страницSyllabus Méthodologie Orientée Objet 2334455667 PDFJordi DepadouОценок пока нет
- Cours Sur Le MicroprocesseurДокумент82 страницыCours Sur Le MicroprocesseursiloneОценок пока нет
- Premier - Ordre TPДокумент5 страницPremier - Ordre TPYahya MohamedОценок пока нет
- TP N°2 - Exemple Word Count Avec HadoopДокумент12 страницTP N°2 - Exemple Word Count Avec HadoopinesОценок пока нет
- Nouvelle Fiche Stage Commutation Voix & DonnéesДокумент1 страницаNouvelle Fiche Stage Commutation Voix & DonnéeskoyabeОценок пока нет
- Systèmes RépartisДокумент4 страницыSystèmes RépartisdamleptithobbitОценок пока нет
- Recommandations Techniques Sage 100 Generation I7 PDFДокумент19 страницRecommandations Techniques Sage 100 Generation I7 PDFRado AndriamahadyОценок пока нет
- Exemple FrapДокумент18 страницExemple Frapassopapou50% (2)
- Prog SystémeДокумент15 страницProg SystémeTiffany WilsonОценок пока нет
- SPSS V 17 Network License Administrators Guide - FrenchДокумент20 страницSPSS V 17 Network License Administrators Guide - FrenchDevin GarrettОценок пока нет
- VirtualisationДокумент36 страницVirtualisationkamal ibrahimОценок пока нет
- CV Riadh RezigДокумент2 страницыCV Riadh RezigRiadh RezigОценок пока нет
- HIDMacros 1.5 FraДокумент17 страницHIDMacros 1.5 FraCharles ScottОценок пока нет
- Labo Initiation Aux Systèmes Embarquées Q2 V1 ArduinoДокумент6 страницLabo Initiation Aux Systèmes Embarquées Q2 V1 ArduinoSulyvan van VanderbeekОценок пока нет
- Pile FileДокумент103 страницыPile FileStaphanie MelОценок пока нет
- Installer Windows Ligne de CommandeДокумент11 страницInstaller Windows Ligne de CommandehicamОценок пока нет