Вам также может понравиться
- Motor Starting AnalysisДокумент5 страницMotor Starting Analysisjeevan kachare100% (1)
- SSR in Power SystemsДокумент29 страницSSR in Power SystemsSrinivas ReddyОценок пока нет
- Motor Starting CasestudyДокумент2 страницыMotor Starting Casestudykajale_shrikant2325Оценок пока нет
- The Application of High Impedance RelaysДокумент24 страницыThe Application of High Impedance RelaysAhmad ShawkyОценок пока нет
- Motor Start UpДокумент26 страницMotor Start UpAntonio Olmedo Avalos100% (1)
- Starting Methods of Induction MotorsДокумент8 страницStarting Methods of Induction MotorsChathuranga Nagasinghe100% (1)
- Chapter 19 - Dynamic ModelsДокумент141 страницаChapter 19 - Dynamic Modelswoldemariam workuОценок пока нет
- Electric Power Generation and Excitation SystemДокумент20 страницElectric Power Generation and Excitation SystemMansen NsubugaОценок пока нет
- Power System SoftwareДокумент10 страницPower System Softwareசக்திவேல் கார்த்திகேயன்Оценок пока нет
- Motor Starting Dynamic AccelerationДокумент63 страницыMotor Starting Dynamic Accelerationashraf-84Оценок пока нет
- Motor Starting - Open ElectricalДокумент12 страницMotor Starting - Open ElectricalHoangОценок пока нет
- High-Impedance Bus Differential Protection ModelingДокумент6 страницHigh-Impedance Bus Differential Protection ModelingtunghtdОценок пока нет
- Induction Motor Tradeoff For VSD Driven Pumps and Fans PDFДокумент5 страницInduction Motor Tradeoff For VSD Driven Pumps and Fans PDFkankokwahОценок пока нет
- SWICON 2008 Technical PapersДокумент368 страницSWICON 2008 Technical Papersboopelectra100% (1)
- Application of Undervoltage Protection To Critical Motors PDFДокумент6 страницApplication of Undervoltage Protection To Critical Motors PDFarisОценок пока нет
- CBIP2010 Considerations and Methods For Effective FBT PDFДокумент12 страницCBIP2010 Considerations and Methods For Effective FBT PDFeagles1109Оценок пока нет
- 02-2 Excitation CourseДокумент31 страница02-2 Excitation CourseFulki Kautsar S100% (1)
- KR Monograph July2013Документ410 страницKR Monograph July2013Soumya RoyОценок пока нет
- Technical Topics: Starting Large Motors From An Onan Engine-Generator SetДокумент24 страницыTechnical Topics: Starting Large Motors From An Onan Engine-Generator SetPhilomine CalvinОценок пока нет
- Fundamentals of PSCAD and General ApplicationsДокумент56 страницFundamentals of PSCAD and General Applicationssandeep kumar mishraОценок пока нет
- Photovoltaic Model Validation GuidelineДокумент37 страницPhotovoltaic Model Validation GuidelineSurajit BanerjeeОценок пока нет
- 08a Motor StartingДокумент36 страниц08a Motor StartingAhmed Abd El WahabОценок пока нет
- An Introduction To Completing A NERC PRC-019 StudyДокумент11 страницAn Introduction To Completing A NERC PRC-019 StudySMS AbdullahОценок пока нет
- Load Flow Analysis PDFДокумент33 страницыLoad Flow Analysis PDFRakshitha VОценок пока нет
- Generator Protection Settings CalculationsДокумент112 страницGenerator Protection Settings CalculationsPradeep_VashistОценок пока нет
- Power System StabilityДокумент68 страницPower System StabilitySarah Frazier100% (3)
- IEEE Guide For Construction and Interpretation of Thermal Limit Curves For Squirrel-Cage MotorsДокумент5 страницIEEE Guide For Construction and Interpretation of Thermal Limit Curves For Squirrel-Cage MotorsRaimundo LimaОценок пока нет
- Different Techniques of Reactive Power CompensationДокумент2 страницыDifferent Techniques of Reactive Power CompensationJagdeep Singh0% (1)
- Reactive Power Compensation StudyДокумент82 страницыReactive Power Compensation StudySaravanan NatarajanОценок пока нет
- Power System Restoration WithДокумент5 страницPower System Restoration WithSandhya ShyamasundarОценок пока нет
- Auto Transfer SchemeДокумент10 страницAuto Transfer SchemenitinpeОценок пока нет
- Minor Training ReportДокумент54 страницыMinor Training ReportZeeshan Qureshi100% (1)
- Fundamentals of Power System ProtectionДокумент22 страницыFundamentals of Power System ProtectionKGОценок пока нет
- Motor Protection - Customer-FINAL PDFДокумент85 страницMotor Protection - Customer-FINAL PDFJulio LoaizaОценок пока нет
- How To Size Current TransformersДокумент3 страницыHow To Size Current TransformersVasu IyerОценок пока нет
- IEEE Task Force Report Digital AVR 1996Документ9 страницIEEE Task Force Report Digital AVR 1996Ra MaОценок пока нет
- Siemens Literature-Automatic Bus TransferДокумент2 страницыSiemens Literature-Automatic Bus TransferKrishna VenkataramanОценок пока нет
- Power OscillationsДокумент54 страницыPower OscillationsVijay RohillaОценок пока нет
- STAR Exercise 4AДокумент3 страницыSTAR Exercise 4Aashraf-84Оценок пока нет
- Protection PhilosophyДокумент50 страницProtection Philosophyrohan sainiОценок пока нет
- Synchronous MachineДокумент33 страницыSynchronous Machinecrisis_z100% (1)
- NERC Protection System Protection Fundamentals Public 060210Документ55 страницNERC Protection System Protection Fundamentals Public 060210srinivasaphanikiranОценок пока нет
- 2.reactive Power and Voltage Control of Offshore Wind Farms (PDFDrive)Документ146 страниц2.reactive Power and Voltage Control of Offshore Wind Farms (PDFDrive)Nam Hoai LeОценок пока нет
- Differential ProtectionДокумент14 страницDifferential ProtectionBashir Ahmad0% (1)
- 100 STATOR EF P345 With 20HZ INJECTION Apr 09Документ6 страниц100 STATOR EF P345 With 20HZ INJECTION Apr 09Amaresh NayakОценок пока нет
- Motor Starter AnalysisДокумент122 страницыMotor Starter AnalysisKeerrthanaa KumaraveluОценок пока нет
- Comparing Power Transformer Turn-to-Turn FaultsДокумент9 страницComparing Power Transformer Turn-to-Turn Faultsskylimit.skylimitОценок пока нет
- M.g.say ch01Документ5 страницM.g.say ch01prabhjot singh150% (2)
- Generator Protection SystemДокумент31 страницаGenerator Protection Systemmuaz_aminu1422100% (1)
- Transformer Inrush Currents and Protection 2603 003 A00Документ4 страницыTransformer Inrush Currents and Protection 2603 003 A00Joshi DhvanitОценок пока нет
- How To Protect Transmission LinesДокумент15 страницHow To Protect Transmission Linesneneng beeОценок пока нет
- Model Validation For Wind Turbine GeneratorДокумент14 страницModel Validation For Wind Turbine GeneratorsuljiciОценок пока нет
- Wind Generator Power Flow Modeling GuideДокумент14 страницWind Generator Power Flow Modeling Guidekunsridhar8901Оценок пока нет
- Integration of Green and Renewable Energy in Electric Power SystemsОт EverandIntegration of Green and Renewable Energy in Electric Power SystemsОценок пока нет
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОт EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОценок пока нет
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977От EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Оценок пока нет
- G-17 Silver Plaza, Tagor Road, Nr. Bhaktinagar Railway Station Rajkot Gujarat 360006Документ4 страницыG-17 Silver Plaza, Tagor Road, Nr. Bhaktinagar Railway Station Rajkot Gujarat 360006Bhavik PrajapatiОценок пока нет
- Step by Step in DIALux With OSRAM LEDsДокумент26 страницStep by Step in DIALux With OSRAM LEDsTommyc1024Оценок пока нет
- Annual Rate Contract For The Supply of Electrical Items at IIM IndoreДокумент22 страницыAnnual Rate Contract For The Supply of Electrical Items at IIM IndoreBhavik PrajapatiОценок пока нет
- REC DrawingsДокумент178 страницREC DrawingsNagesh Rao98% (45)
- Chemical Earthing PDFДокумент2 страницыChemical Earthing PDFBhavik PrajapatiОценок пока нет
- Iecex TCD 02 Scheme Ed 7.0Документ103 страницыIecex TCD 02 Scheme Ed 7.0Bhavik PrajapatiОценок пока нет
- LeДокумент1 страницаLeBhavik PrajapatiОценок пока нет
- Sustainability 08 00013Документ13 страницSustainability 08 00013FredОценок пока нет
- Motor StartingДокумент23 страницыMotor StartingBhavik PrajapatiОценок пока нет
- Iecex TCD 02 Scheme Ed 7.0Документ103 страницыIecex TCD 02 Scheme Ed 7.0Bhavik PrajapatiОценок пока нет
- Profily Finskych FiremДокумент16 страницProfily Finskych FiremJoenet DarmawanОценок пока нет
- PharmacyДокумент9 страницPharmacyBhavik PrajapatiОценок пока нет
- Ieee 14 Bus Technical NoteДокумент6 страницIeee 14 Bus Technical NoteStefania OliveiraОценок пока нет
- Lesson Planning FormatДокумент3 страницыLesson Planning FormatBhavik PrajapatiОценок пока нет
- Arrester Book Ed 3 enДокумент128 страницArrester Book Ed 3 enNilan Suranga Karavita VidanelageОценок пока нет
- Arrester Book Ed 3 enДокумент128 страницArrester Book Ed 3 enNilan Suranga Karavita VidanelageОценок пока нет
- Starting Time Calculation For Induction Motor 2332 0796 1000136Документ4 страницыStarting Time Calculation For Induction Motor 2332 0796 1000136Bhavik PrajapatiОценок пока нет
- Energies 06 05357 PDFДокумент25 страницEnergies 06 05357 PDFBhavik PrajapatiОценок пока нет
- Aluminium Busbar Sizing Software OutputДокумент3 страницыAluminium Busbar Sizing Software Outputkapil100% (4)
- Earthing CalculationДокумент14 страницEarthing CalculationNatarajan Ramakrishnan100% (18)
- Symmetrical ComponentsДокумент2 страницыSymmetrical ComponentsHamayoun Murtaza100% (1)
- WSU GENTheory 1PageperSlide 160114 PDFДокумент247 страницWSU GENTheory 1PageperSlide 160114 PDFhermawanОценок пока нет
- Vikram Solar PanelsДокумент4 страницыVikram Solar PanelsBhavik PrajapatiОценок пока нет
- Untitled - SummaryДокумент2 страницыUntitled - SummaryBhavik PrajapatiОценок пока нет
- TSA - CompleteДокумент19 страницTSA - CompleteBhavik PrajapatiОценок пока нет
- Bim Services BrochureДокумент8 страницBim Services BrochureBhavik PrajapatiОценок пока нет
- One-Line Diagram - OLV1 (Load Flow Analysis) : Page 1 23:15:55 Mar 11, 2018 Project File: IEEE14BUSДокумент2 страницыOne-Line Diagram - OLV1 (Load Flow Analysis) : Page 1 23:15:55 Mar 11, 2018 Project File: IEEE14BUSBhavik PrajapatiОценок пока нет
- ShortДокумент7 страницShortBhavik PrajapatiОценок пока нет
- Transient Stability 479Документ6 страницTransient Stability 479Armando MaloneОценок пока нет
- 04401510Документ9 страниц04401510Anonymous HyOfbJ6Оценок пока нет
- Scipaper 7Документ2 страницыScipaper 7JL Serioso BalesОценок пока нет
- Brain Imaging TechniquesДокумент6 страницBrain Imaging TechniquesIlika Guha MajumdarОценок пока нет
- Number SystemsДокумент165 страницNumber SystemsapamanОценок пока нет
- The Role of Financial System in DevelopmentДокумент5 страницThe Role of Financial System in DevelopmentCritical ThinkerОценок пока нет
- Public BudgetingДокумент15 страницPublic BudgetingTom Wan Der100% (4)
- Johns Hopkins University Press Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To ELHДокумент13 страницJohns Hopkins University Press Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To ELHAttila Lébényi-PalkovicsОценок пока нет
- Linking and Relocation - Stacks - Procedures - MacrosДокумент11 страницLinking and Relocation - Stacks - Procedures - MacrosJeevanantham GovindarajОценок пока нет
- Aruego, Jr. v. Court of Appeals, G.R. No. 112193, March 13, 1996Документ5 страницAruego, Jr. v. Court of Appeals, G.R. No. 112193, March 13, 1996hello kitty black and whiteОценок пока нет
- Gothic Revival ArchitectureДокумент19 страницGothic Revival ArchitectureAlexandra Maria NeaguОценок пока нет
- Activity Chapter1 ManagementДокумент7 страницActivity Chapter1 ManagementTricia Amigo SacareОценок пока нет
- Moon and SaturnДокумент4 страницыMoon and SaturnRamanasarmaОценок пока нет
- "Shiksha Se Hi Suraksha": Literacy Campaign WeekДокумент4 страницы"Shiksha Se Hi Suraksha": Literacy Campaign WeekVaishali100% (1)
- 1999, 2003 - Purple Triangles - BrochureДокумент32 страницы1999, 2003 - Purple Triangles - BrochureMaria Patinha100% (2)
- INTRODUCTIONДокумент1 страницаINTRODUCTIONNabila Gaming09Оценок пока нет
- Saptamsa - D7Документ4 страницыSaptamsa - D7Nabeel IrfanОценок пока нет
- Inside Out or Outside inДокумент6 страницInside Out or Outside inΧΡΗΣΤΟΣ ΠΑΠΑΔΟΠΟΥΛΟΣОценок пока нет
- Parkinson DiseaseДокумент49 страницParkinson Diseaseiqra100% (1)
- Adolescent Violence Towards Parents Myths and RealitiesДокумент25 страницAdolescent Violence Towards Parents Myths and RealitiesJoão D C MendonçaОценок пока нет
- Angel Number 1208 Meaning Increased FaithДокумент1 страницаAngel Number 1208 Meaning Increased FaithKhally KatieОценок пока нет
- Direct Filter Synthesis Rhea PreviewДокумент25 страницDirect Filter Synthesis Rhea Previewoprakash9291Оценок пока нет
- Oedogonium: Class: Chlorophyceae Order: Oedogoniales Family: OedogoniaceaeДокумент28 страницOedogonium: Class: Chlorophyceae Order: Oedogoniales Family: OedogoniaceaeA SASIKALAОценок пока нет
- Lecture 6Документ7 страницLecture 6Shuja MirОценок пока нет
- COMM 103 Floyd Chapters Study GuideДокумент4 страницыCOMM 103 Floyd Chapters Study GuideMad BasblaОценок пока нет
- Spouses Aggabao V. Parulan, Jr. and Parulan G.R. No. 165803, (September 1, 2010) Doctrine (S)Документ9 страницSpouses Aggabao V. Parulan, Jr. and Parulan G.R. No. 165803, (September 1, 2010) Doctrine (S)RJОценок пока нет
- Fortune 2010Документ14 страницFortune 2010Stefan JenkinsОценок пока нет
- Flow ChemistryДокумент6 страницFlow Chemistryrr1819Оценок пока нет
- Who, Summary NotesДокумент12 страницWho, Summary NotesIvan Lohr100% (2)
- Internship Report On Effects of Promotion System On Employee Job Satisfaction of Janata Bank Ltd.Документ57 страницInternship Report On Effects of Promotion System On Employee Job Satisfaction of Janata Bank Ltd.Tareq Alam100% (1)
- This Study Resource Was: Interactive Reading QuestionsДокумент3 страницыThis Study Resource Was: Interactive Reading QuestionsJoshua LagonoyОценок пока нет
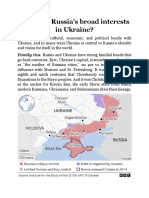
- What Are RussiaДокумент3 страницыWhat Are RussiaMuhammad SufyanОценок пока нет