Вам также может понравиться
- Dokumen - Pub - Bobs Refunding Ebook v3 PDFДокумент65 страницDokumen - Pub - Bobs Refunding Ebook v3 PDFJohn the First100% (3)
- Checklist & Guideline ISO 22000Документ14 страницChecklist & Guideline ISO 22000Documentos Tecnicos75% (4)
- TIMO Final 2020-2021 P3Документ5 страницTIMO Final 2020-2021 P3An Nguyen100% (2)
- MA2001 - Differential Calculus of Multivariable Functions 1314AДокумент48 страницMA2001 - Differential Calculus of Multivariable Functions 1314AMatthew LauОценок пока нет
- Tutorial Topic 1 (1-10)Документ10 страницTutorial Topic 1 (1-10)fatin HumairaОценок пока нет
- Lecture Note - Week 3 Ssce 1993Документ48 страницLecture Note - Week 3 Ssce 1993Paramoda TriangleОценок пока нет
- Week 1Документ17 страницWeek 1Shavin ChandОценок пока нет
- Lesson 3 - DERIVATIVES OF FUNCTIONSДокумент13 страницLesson 3 - DERIVATIVES OF FUNCTIONSNeo Garcera100% (1)
- Chapter 9 Multivariable FunctionsДокумент10 страницChapter 9 Multivariable FunctionsReza HusainiОценок пока нет
- Differential Calculus of Functions of One VariableДокумент30 страницDifferential Calculus of Functions of One VariableWESTON MALAMAОценок пока нет
- CH 1Документ12 страницCH 1jeffryОценок пока нет
- Lesson 4 The DerivativeДокумент14 страницLesson 4 The DerivativeCupackeОценок пока нет
- Chapter FourДокумент31 страницаChapter FourLakachew GetasewОценок пока нет
- L7 Four Step Rule Differentiation FormulasДокумент42 страницыL7 Four Step Rule Differentiation FormulasLinearОценок пока нет
- Chapter ThreeДокумент15 страницChapter ThreeMustafa SagbanОценок пока нет
- Practice Problems-2Документ3 страницыPractice Problems-2Bantu AadhfОценок пока нет
- Chapter 5 - Partial DerivativesДокумент23 страницыChapter 5 - Partial Derivativesdbreddy287Оценок пока нет
- Lesson 7 - Four Step Rule Differentiation Formulas2Документ13 страницLesson 7 - Four Step Rule Differentiation Formulas2bhox khoОценок пока нет
- Week 10Документ10 страницWeek 10Shavin ChandОценок пока нет
- Example 8: Solution:: Z X Xy yДокумент8 страницExample 8: Solution:: Z X Xy yTayyab HusaainОценок пока нет
- 2220 Ball Ball The: G 4 at D 4Документ18 страниц2220 Ball Ball The: G 4 at D 4api-630992605Оценок пока нет
- Y X y y X y y X Y: We Turn Now To The Solution of Differential Equations of Order Two or HigherДокумент29 страницY X y y X y y X Y: We Turn Now To The Solution of Differential Equations of Order Two or HigherLEE LEE LAUОценок пока нет
- Lesson 7 - Four Step Rule Differentiation Formulas2Документ13 страницLesson 7 - Four Step Rule Differentiation Formulas2Kent AvilaОценок пока нет
- Y (X), F (T) - in Practical Applications, However, Quantities of Interest Are, X, X, X, X, X, X, X, X, X)Документ8 страницY (X), F (T) - in Practical Applications, However, Quantities of Interest Are, X, X, X, X, X, X, X, X, X)vaibhav shahОценок пока нет
- MECH2407 (Advanced Calculus Part I)Документ94 страницыMECH2407 (Advanced Calculus Part I)Chou Zen Hang100% (2)
- Chapter 4 DifferentiationДокумент37 страницChapter 4 DifferentiationVios, Allen Rafael M.Оценок пока нет
- Lesson 04-The DerivativeДокумент14 страницLesson 04-The DerivativeAXELLE NICOLE GOMEZОценок пока нет
- Sec. 14.3Документ6 страницSec. 14.3cherbibzОценок пока нет
- Partial DifferentiationДокумент20 страницPartial DifferentiationApoorva PrakashОценок пока нет
- Lecture Notes (Chapter 1.3 Partial Derivative, Implicit Differentiation)Документ6 страницLecture Notes (Chapter 1.3 Partial Derivative, Implicit Differentiation)Ammar WahabОценок пока нет
- Mathematical AnalysisДокумент143 страницыMathematical AnalysisAna AmootОценок пока нет
- Z02380010120154034Session 10-12Документ47 страницZ02380010120154034Session 10-12luissОценок пока нет
- Limit, Continuity & Differentiability (Solution)Документ5 страницLimit, Continuity & Differentiability (Solution)nobodyОценок пока нет
- Application of Derivative PDFДокумент6 страницApplication of Derivative PDFanitaОценок пока нет
- Module 6 - Four Step Rule Differentiation FormulasДокумент59 страницModule 6 - Four Step Rule Differentiation FormulasMackneal DuОценок пока нет
- Topic 5 Applications of Derivatives Schematic DiagramДокумент6 страницTopic 5 Applications of Derivatives Schematic DiagramKumar SushilОценок пока нет
- Lesson 2 - CONTINUITY OF A FUNCTIONДокумент17 страницLesson 2 - CONTINUITY OF A FUNCTIONNeo GarceraОценок пока нет
- PPT07 - Functions of Several VariablesДокумент32 страницыPPT07 - Functions of Several VariablesDiana WalesОценок пока нет
- Spring 2023 Mth301 1 SolДокумент7 страницSpring 2023 Mth301 1 SolFatma beygОценок пока нет
- Partial Differentiation PDFДокумент20 страницPartial Differentiation PDFSarthak SharmaОценок пока нет
- CALENG1 Lesson 03 Differentiation Formulas 1Документ7 страницCALENG1 Lesson 03 Differentiation Formulas 1Martin Nicolas ChuaОценок пока нет
- Limits and Continuity of Functions of Several Variables PDFДокумент28 страницLimits and Continuity of Functions of Several Variables PDFShelly Kustanti100% (1)
- Partial Differentiation & ApplicationsДокумент12 страницPartial Differentiation & ApplicationsrootveshmehtaОценок пока нет
- Fourier Series and TransformsДокумент21 страницаFourier Series and TransformsQazi ShaikhОценок пока нет
- MA8491 Numerical Methods 01 - by LearnEngineering - inДокумент117 страницMA8491 Numerical Methods 01 - by LearnEngineering - inGOVINDHAVASAN SОценок пока нет
- Mathematic (III) : Partial DerivativeДокумент4 страницыMathematic (III) : Partial DerivativeyehyaОценок пока нет
- Continuity, Differentaibility - MOD - DPP1Документ4 страницыContinuity, Differentaibility - MOD - DPP1Spam TargetОценок пока нет
- Lecture 4Документ2 страницыLecture 4ERICKSON CAUYAOОценок пока нет
- Lecture Notes (Chapter 1.3 Partial Derivative)Документ10 страницLecture Notes (Chapter 1.3 Partial Derivative)Shaktivell LetchumananОценок пока нет
- Chapter 2 DifferentiationДокумент48 страницChapter 2 DifferentiationKuna KunavathiОценок пока нет
- Lecture 4 DerivativesДокумент58 страницLecture 4 Derivativesghazi membersОценок пока нет
- Lesson 4 6Документ12 страницLesson 4 6Romel PavillonОценок пока нет
- Partial Differentiation and Applications Unit-1,2Документ81 страницаPartial Differentiation and Applications Unit-1,2rootveshmehtaОценок пока нет
- Function: Q-Series: Mathematics For BS/MS.C QM Khan Wazir 14Документ10 страницFunction: Q-Series: Mathematics For BS/MS.C QM Khan Wazir 14Kamran JalilОценок пока нет
- For More Important Questions Visit:: Applications of DerivativesДокумент14 страницFor More Important Questions Visit:: Applications of DerivativesRutva Paresh BabariaОценок пока нет
- Lecture 05 20-10-21Документ3 страницыLecture 05 20-10-21Tayyab HusaainОценок пока нет
- Functions of Sevral VariablesДокумент36 страницFunctions of Sevral VariablesFerdinand Sebastian BarnabasОценок пока нет
- 18 Linear IndependenceДокумент3 страницы18 Linear IndependenceRL EstonaОценок пока нет
- Tutorial Sheet - 3 (Multiple Integrals)Документ3 страницыTutorial Sheet - 3 (Multiple Integrals)Dipankar NathОценок пока нет
- Total DerivativeДокумент33 страницыTotal DerivativeVardhan MunglaОценок пока нет
- Calculus Lecture 6Документ23 страницыCalculus Lecture 6Suneth KelumОценок пока нет
- Calculus Lesson 3Документ19 страницCalculus Lesson 3Suneth KelumОценок пока нет
- Calculus Lesson 1Документ30 страницCalculus Lesson 1Suneth KelumОценок пока нет
- Calulus Course-Important StuffДокумент3 страницыCalulus Course-Important StuffSuneth KelumОценок пока нет
- Farmer Producer Companies in OdishaДокумент34 страницыFarmer Producer Companies in OdishaSuraj GantayatОценок пока нет
- Lesson PlanДокумент2 страницыLesson Plannicole rigonОценок пока нет
- WEB DESIGN WITH AUSTINE-converted-1Документ9 страницWEB DESIGN WITH AUSTINE-converted-1JayjayОценок пока нет
- Psychological Contract Rousseau PDFДокумент9 страницPsychological Contract Rousseau PDFSandy KhanОценок пока нет
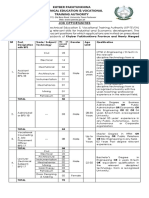
- KP Tevta Advertisement 16-09-2019Документ4 страницыKP Tevta Advertisement 16-09-2019Ishaq AminОценок пока нет
- Pavement Design1Документ57 страницPavement Design1Mobin AhmadОценок пока нет
- QP December 2006Документ10 страницQP December 2006Simon ChawingaОценок пока нет
- Ito Na Talaga Yung FinalДокумент22 страницыIto Na Talaga Yung FinalJonas Gian Miguel MadarangОценок пока нет
- Functions in C++Документ23 страницыFunctions in C++Abhishek ModiОценок пока нет
- Marketing FinalДокумент15 страницMarketing FinalveronicaОценок пока нет
- Broken BondsДокумент20 страницBroken Bondsapi-316744816Оценок пока нет
- Laboratory Manual (CIV 210) Engineering Surveying (2018-19) (For Private Circulation Only)Документ76 страницLaboratory Manual (CIV 210) Engineering Surveying (2018-19) (For Private Circulation Only)gyanendraОценок пока нет
- Opc PPT FinalДокумент22 страницыOpc PPT FinalnischalaОценок пока нет
- Chapter 3 - Organization Structure & CultureДокумент63 страницыChapter 3 - Organization Structure & CultureDr. Shuva GhoshОценок пока нет
- Richardson Heidegger PDFДокумент18 страницRichardson Heidegger PDFweltfremdheitОценок пока нет
- Fss Presentation Slide GoДокумент13 страницFss Presentation Slide GoReinoso GreiskaОценок пока нет
- WebLMT HelpДокумент12 страницWebLMT HelpJoão LopesОценок пока нет
- Sindi and Wahab in 18th CenturyДокумент9 страницSindi and Wahab in 18th CenturyMujahid Asaadullah AbdullahОценок пока нет
- Spesifikasi PM710Документ73 страницыSpesifikasi PM710Phan'iphan'Оценок пока нет
- Career Essay 1Документ2 страницыCareer Essay 1api-572592063Оценок пока нет
- Hamstring - WikipediaДокумент21 страницаHamstring - WikipediaOmar MarwanОценок пока нет
- Law of EvidenceДокумент14 страницLaw of EvidenceIsha ChavanОценок пока нет
- Retailing in IndiaДокумент11 страницRetailing in IndiaVinod MalkarОценок пока нет
- Manual s10 PDFДокумент402 страницыManual s10 PDFLibros18Оценок пока нет
- Digital MetersДокумент47 страницDigital MetersherovhungОценок пока нет
- Homework 1 W13 SolutionДокумент5 страницHomework 1 W13 SolutionSuzuhara EmiriОценок пока нет
- 7400 IC SeriesДокумент16 страниц7400 IC SeriesRaj ZalariaОценок пока нет