Вам также может понравиться
- All Terrain Vehicle Project SynopsisДокумент14 страницAll Terrain Vehicle Project SynopsisTARUN DHUNNA100% (5)
- Advanced Seat Suspension Control System Design for Heavy Duty VehiclesОт EverandAdvanced Seat Suspension Control System Design for Heavy Duty VehiclesОценок пока нет
- Design Project TwoДокумент10 страницDesign Project Twogeletayaadii100% (1)
- Tractor Principles: The Action, Mechanism, Handling, Care, Maintenance and Repair of the Gas Engine TractorОт EverandTractor Principles: The Action, Mechanism, Handling, Care, Maintenance and Repair of the Gas Engine TractorОценок пока нет
- Shock Absorber Test RigДокумент14 страницShock Absorber Test RigOmKar GunjalОценок пока нет
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsОт EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsОценок пока нет
- Baja India 2010 Design Report VAJRAДокумент8 страницBaja India 2010 Design Report VAJRAPranav RawatОценок пока нет
- Designing A Final Drive For A Tracked VehicleДокумент9 страницDesigning A Final Drive For A Tracked VehicleIroshana Thushara KiriwattuduwaОценок пока нет
- Project Report On Commercial Vehicle Chassis Frame DesignДокумент32 страницыProject Report On Commercial Vehicle Chassis Frame DesignRajat Kethwas100% (1)
- Dame Project Machine Element IiДокумент6 страницDame Project Machine Element IiBirbirsa BetieОценок пока нет
- A Report On Design Approach For FSAE Car..Документ8 страницA Report On Design Approach For FSAE Car..Sandeep Kr. Mishra100% (1)
- Automobile Chassis System UNIT IДокумент58 страницAutomobile Chassis System UNIT IA - STAR100% (1)
- Design of Student Formula Race Car Chassis: Abhijeet DasДокумент5 страницDesign of Student Formula Race Car Chassis: Abhijeet DasSammmОценок пока нет
- Design and Development of Front Suspension for an Off-Road VehicleДокумент6 страницDesign and Development of Front Suspension for an Off-Road VehicleRodrigo bolaОценок пока нет
- Ehicle Evelopment Rganization: Product Engineering Vehicle Engineering StylingДокумент56 страницEhicle Evelopment Rganization: Product Engineering Vehicle Engineering StylingSundhar SavariОценок пока нет
- Machine Design Project IIДокумент5 страницMachine Design Project IIYigremachew bizualew AyenewОценок пока нет
- F1 Track Design and SafetyДокумент22 страницыF1 Track Design and SafetySwati NikamОценок пока нет
- IRJET V7I11275 FourWheelSteeringforATVДокумент10 страницIRJET V7I11275 FourWheelSteeringforATVHadesОценок пока нет
- Construction of A Constant Mesh Gear BoxДокумент21 страницаConstruction of A Constant Mesh Gear BoxAmare Eshetie0% (1)
- Manga Raju 2008Документ10 страницManga Raju 2008bhakticahdnmОценок пока нет
- All Terrain VehicleДокумент9 страницAll Terrain VehicleAnirudh PanickerОценок пока нет
- Project Report On ATV Prototype BAJA SAE INDIAДокумент60 страницProject Report On ATV Prototype BAJA SAE INDIAsanket50% (6)
- Selection of Suspension Arrangement of Traction Motors A Right Approach PDFДокумент13 страницSelection of Suspension Arrangement of Traction Motors A Right Approach PDFRamesh YadlaОценок пока нет
- Indian Institute of Technology PatnaДокумент14 страницIndian Institute of Technology PatnaAnkit SahОценок пока нет
- WCE2015 pp1283-1286 PDFДокумент4 страницыWCE2015 pp1283-1286 PDFAftaab AlamОценок пока нет
- Design and Analysis of Modified Front Double Wishbone Suspension For A Three Wheel Hybrid VehicleДокумент4 страницыDesign and Analysis of Modified Front Double Wishbone Suspension For A Three Wheel Hybrid VehicleRima AroraОценок пока нет
- 8 Rolling Stock & Maintenace FacilitiesДокумент35 страниц8 Rolling Stock & Maintenace FacilitiesAnkit KhuranaОценок пока нет
- Tri Wheeled Solar Powered Electric Vehicle PPT For 3rd ReviewДокумент23 страницыTri Wheeled Solar Powered Electric Vehicle PPT For 3rd ReviewVineel Vihar100% (1)
- Chasis PDFДокумент56 страницChasis PDFPavan Karthik Mallela100% (1)
- Designing Suspension for Terrain VehicleДокумент6 страницDesigning Suspension for Terrain VehicleSami Onur VuralОценок пока нет
- Design Report Car 30Документ14 страницDesign Report Car 30PRANESH SHANKAR SОценок пока нет
- Design and fabrication of an all-terrain BAJA vehicleДокумент8 страницDesign and fabrication of an all-terrain BAJA vehicleaciddropsОценок пока нет
- Design and Manufacturing of Differential Locking SystemДокумент6 страницDesign and Manufacturing of Differential Locking SystemShashank VaidyaОценок пока нет
- MET2013 Hinojosa RicardoДокумент27 страницMET2013 Hinojosa RicardoAmal GeorgeОценок пока нет
- Design and Analysis of Brake and Gas PedalДокумент5 страницDesign and Analysis of Brake and Gas PedalIJAERS JOURNAL100% (1)
- Design Project 11Документ38 страницDesign Project 11Hemanth VeeraОценок пока нет
- Wheel Steering System PDFДокумент6 страницWheel Steering System PDFvivek ghoriОценок пока нет
- Indiana UniversityДокумент64 страницыIndiana Universitymdasifkhan2013Оценок пока нет
- Chassis Design Report PDFДокумент8 страницChassis Design Report PDFPrakhar YadavОценок пока нет
- JABALPUR ENGINEERING COLLEGE TRAINING REPORT AT VE COMMERCIAL VEHICLESДокумент21 страницаJABALPUR ENGINEERING COLLEGE TRAINING REPORT AT VE COMMERCIAL VEHICLESSanniChChureОценок пока нет
- IECON 2011 - Design Procedure For Low Cost, Low Mass, Direct Drive, In-Wheel Motor Drive Trains For Electric and Hybrid VehiclesДокумент5 страницIECON 2011 - Design Procedure For Low Cost, Low Mass, Direct Drive, In-Wheel Motor Drive Trains For Electric and Hybrid Vehiclesrain_forestОценок пока нет
- 2011 MCC Baja SAE Design ReportДокумент14 страниц2011 MCC Baja SAE Design ReportRonald George100% (3)
- Downhill Belt Conveyors-The Starting and Speed Control ThereofДокумент14 страницDownhill Belt Conveyors-The Starting and Speed Control ThereofKorosh ForoghanОценок пока нет
- All Terrain Vehicles: A Seminar ReportДокумент37 страницAll Terrain Vehicles: A Seminar ReportShivam SharmaОценок пока нет
- Applications of Chain Drive in Automobiles and SelectionДокумент14 страницApplications of Chain Drive in Automobiles and Selectionmakarand gokhaleОценок пока нет
- Effi Cycle PresentationДокумент13 страницEffi Cycle Presentationwolfram77web100% (7)
- RMD ReportДокумент29 страницRMD ReportSergio PugazhОценок пока нет
- Wheel Balancing MachineДокумент26 страницWheel Balancing MachinePatrick Marc Brunelle100% (2)
- Sae j2469-2004 StartabilityДокумент5 страницSae j2469-2004 StartabilityJaime RocanoОценок пока нет
- Report On AGVДокумент29 страницReport On AGVMayank AgarwalОценок пока нет
- Vehicle Dynamics: R. Sai SandeepДокумент12 страницVehicle Dynamics: R. Sai SandeepRudra Sai SandeepОценок пока нет
- Suspension FinalДокумент12 страницSuspension FinalShefaliОценок пока нет
- suspension test-rig project ReportДокумент22 страницыsuspension test-rig project ReportMayur Madhukar MankarОценок пока нет
- Kich Thuoc TreoДокумент27 страницKich Thuoc TreoDiệp Vĩ KhangОценок пока нет
- Analysis of Alternative Front Suspension Systems For MotorcyclesДокумент10 страницAnalysis of Alternative Front Suspension Systems For MotorcyclesRasbin SharmaОценок пока нет
- Automotive Chassis and Suspension SystemsДокумент77 страницAutomotive Chassis and Suspension SystemsMarvin Sarmiento TalimonganОценок пока нет
- Suspension AnalysisДокумент11 страницSuspension Analysisanmol6237Оценок пока нет
- Differential Torque Steering For Future Combat VehiclesДокумент11 страницDifferential Torque Steering For Future Combat VehiclesBurak TuncerОценок пока нет
- Articulated Truck: Engine Weights Body CapacitiesДокумент28 страницArticulated Truck: Engine Weights Body CapacitiesTiago AlvesОценок пока нет
- Yale 090 VX PDFДокумент680 страницYale 090 VX PDFCorjuc Stefan100% (2)
- Fault Codes: STO U AndriivДокумент6 страницFault Codes: STO U AndriivAtochkavОценок пока нет
- 2011 Audi A4 2011 Audi A4 Avant 2011 Audi S4: Quick Reference GuideДокумент16 страниц2011 Audi A4 2011 Audi A4 Avant 2011 Audi S4: Quick Reference GuideFotokopirnicaSonyPSОценок пока нет
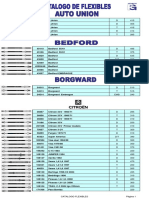
- FlexiblesДокумент13 страницFlexiblesGabriela San PedroОценок пока нет
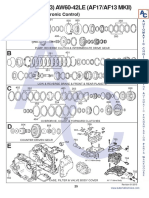
- 0692003mi 12695 Aw 60 40 PDFДокумент3 страницы0692003mi 12695 Aw 60 40 PDFossoskiОценок пока нет
- 6HP26A 61 CatalogДокумент48 страниц6HP26A 61 CatalogMohammed MochrifОценок пока нет
- Mazda & China Parts List (Market) 01-05-2023Документ1 страницаMazda & China Parts List (Market) 01-05-2023m h habib m h kassamОценок пока нет
- Car Diagnosis and Repair TechnologiesДокумент54 страницыCar Diagnosis and Repair TechnologiesEna Pelic56% (16)
- 1997 Toyota Camry Automatic Transmission AssemblyДокумент9 страниц1997 Toyota Camry Automatic Transmission Assemblybrianwcoffey50% (2)
- SANTRO Hatchback BrochureДокумент10 страницSANTRO Hatchback Brochureshree automobilesОценок пока нет
- Aston Martin DB11 Aluminium Chassis 19Документ1 страницаAston Martin DB11 Aluminium Chassis 19Indra FauzanОценок пока нет
- 1 PDFДокумент1 страница1 PDFAbolfazl0% (1)
- Tadano GR - 1000 XL - 2Документ17 страницTadano GR - 1000 XL - 2CAROLINA CORREDORОценок пока нет
- ADAS Solutions: Radar and Camera Calibration For Advanced Driver Assistance SystemsДокумент16 страницADAS Solutions: Radar and Camera Calibration For Advanced Driver Assistance SystemsJerzy OzОценок пока нет
- Diagrama ChiltonДокумент2 страницыDiagrama ChiltonJean Carlos Patiño CorreaОценок пока нет
- Tractor Parts and FunctionsДокумент2 страницыTractor Parts and FunctionsMary GraceОценок пока нет
- PistonДокумент247 страницPistonmeyyiti01Оценок пока нет
- Automotive Acronyms and AbbreviationsДокумент4 страницыAutomotive Acronyms and AbbreviationsHasnain AftabОценок пока нет
- AG 17 B EN Low PDFДокумент25 страницAG 17 B EN Low PDFRavisatya DasamОценок пока нет
- 2003 Nissan Altima 2.5 Serivce Manual RSUДокумент12 страниц2003 Nissan Altima 2.5 Serivce Manual RSUAndy Dellinger100% (1)
- Komatsu Hydraulic Excavator Pc158us 2 Shop ManualДокумент20 страницKomatsu Hydraulic Excavator Pc158us 2 Shop Manualrobt100% (42)
- Basic Training ECU InfoДокумент21 страницаBasic Training ECU InfoManuel Ruiz100% (1)
- DLK PDFДокумент231 страницаDLK PDFTony JenОценок пока нет
- C-Class W204 1107 02Документ136 страницC-Class W204 1107 02Youssef Tarek0% (1)
- Suspension Trasera 97-98Документ6 страницSuspension Trasera 97-98kilofome05Оценок пока нет
- Leland - Brake Shoe - CatalogДокумент37 страницLeland - Brake Shoe - CatalogYunfan ZhangОценок пока нет
- GP Auto Transmission PackageДокумент14 страницGP Auto Transmission PackageRajibОценок пока нет
- Spare Parts Catalog: MT-L 3065 II Material Number: 4474.050.337 Current Date: 10.05.2023Документ31 страницаSpare Parts Catalog: MT-L 3065 II Material Number: 4474.050.337 Current Date: 10.05.2023TomiОценок пока нет
- Gilera Runner 125Документ80 страницGilera Runner 125Marco MoreiraОценок пока нет
- Wabco C Type - p38Документ0 страницWabco C Type - p38Richard Andrianjaka LuckyОценок пока нет
- To Engineer Is Human: The Role of Failure in Successful DesignОт EverandTo Engineer Is Human: The Role of Failure in Successful DesignРейтинг: 4 из 5 звезд4/5 (137)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansОт EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansОценок пока нет
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationОт EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationРейтинг: 4 из 5 звезд4/5 (18)
- Methodology for Estimating Carbon Footprint of Road Projects: Case Study: IndiaОт EverandMethodology for Estimating Carbon Footprint of Road Projects: Case Study: IndiaОценок пока нет
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansОт EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansРейтинг: 4.5 из 5 звезд4.5/5 (21)
- The Great Bridge: The Epic Story of the Building of the Brooklyn BridgeОт EverandThe Great Bridge: The Epic Story of the Building of the Brooklyn BridgeРейтинг: 4.5 из 5 звезд4.5/5 (59)
- Crossings: How Road Ecology Is Shaping the Future of Our PlanetОт EverandCrossings: How Road Ecology Is Shaping the Future of Our PlanetРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Shallow Foundations: Discussions and Problem SolvingОт EverandShallow Foundations: Discussions and Problem SolvingРейтинг: 5 из 5 звезд5/5 (1)
- Composite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsОт EverandComposite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsОценок пока нет
- Climate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingОт EverandClimate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingОценок пока нет
- Field Book for Quality Control in Earthwork Operations: Project Construction Management BookОт EverandField Book for Quality Control in Earthwork Operations: Project Construction Management BookОценок пока нет