Академический Документы
Профессиональный Документы
Культура Документы
Estudo Comparativo de Controladores Sugeno e Mandani
Загружено:
linspauloАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Estudo Comparativo de Controladores Sugeno e Mandani
Загружено:
linspauloАвторское право:
Доступные форматы
Estudo comparativo de controladores de Mamdani e Sugeno
para controle de trfego em intersees isoladas
Michelle Andrade1; Maria Alice Prudncio Jacques2
Resumo: Na definio de um controlador fuzzy que modele o conhecimento do especialista e promova o controle desejado de um
determinado sistema, o projetista precisa selecionar, inicialmente, o tipo bsico de controlador a ser projetado. Isto , precisa definir se
o controlador ser do tipo proposto por Mamdani ou Sugeno. Na literatura so encontrados controladores semafricos fuzzy dos dois
tipos sem que, no entanto, referncia seja feita s razes que levaram adoo de um tipo em detrimento do outro. Visando cobrir essa
lacuna, este trabalho analisa as principais caractersticas dos dois tipos de controladores, e compara as respostas e os efeitos dos mes-
mos no controle de diferentes volumes de trfego em uma interseo isolada. Os resultados mostram que o controlador de Sugeno apre-
senta ntidas vantagens sobre o de Mamdani para a aplicao considerada.
Abstract: In defining the fuzzy controller that models specialist knowledge and promotes the desired control of a specific system, the
planner needs to select firstly the basic type of controller to be projected. In other words, it is necessary to define if the controller will
be the type proposed by Mamdani or Sugeno. In the literature, there are fuzzy traffic controllers from the two types without there being
any explanation as to the choice of one over the other. With a view to filling this loophole, this study analyses the main characteristics
of both controller types, and it compares their answers and results in controlling different traffic volumes at an isolated intersection.
Results indicate that the Sugeno controller presents clear advantages vis a vis Madamis in the application considered.
1. INTRODUO de conjuntos fuzzy (Mamdani e Assilian, 1975). Iden-
Em 1973 Zadeh publicou um artigo que lanou as ba- tificando algumas dificuldades para a utilizao do
ses para a utilizao da lgica fuzzy na anlise de sis- processo de deciso adotado no controlador de Mam-
temas e processos de deciso cuja complexidade, se- dani, Takagi e Sugeno (1983) propuseram um mtodo
gundo o autor, no permitia a utilizao de tcnicas de tomada de deciso simplificado, baseado na lgica
matemticas convencionais. Nesse trabalho foi cunha- fuzzy, onde somente o antecedente das regras forma-
do o termo algoritmo fuzzy, definido como um con- do por variveis fuzzy. O conseqente de cada regra
junto ordenado de instrues fuzzy cuja execuo pro- expresso por uma funo linear dos valores observa-
duz uma soluo aproximada para um determinado dos das variveis que descrevem o estado do sistema
problema (Zadeh, 1973). De acordo com Kikuchi (variveis de entrada). Este tipo de controlador refe-
(1991), o emprego de algoritmos fuzzy para a aborda- rido na literatura como controlador de Sugeno (Lee,
gem e soluo de problemas na rea de transportes se 1990a; Zimmermann, 1996; MathWorks, 2008).
justifica em funo do grau de incerteza associado a Os controladores de Mamdani e Sugeno sofreram
vrios desses problemas, como o caso do controle do aprimoramentos ao longo do tempo e tm sido utiliza-
trfego em intersees semaforizadas. dos para diferentes aplicaes (Lee, 1990a). Atual-
A utilizao de algoritmos fuzzy na soluo de pro- mente esto disponveis em pacotes computacionais,
blemas de controle foi iniciada com o trabalho pionei- com diferentes recursos para implementao dos seus
ro de Mamdani (1973, apud Sugeno, 1985), motivado componentes, o que facilita o desenvolvimento de
pelos trabalhos de Zadeh. No controlador desenvolvi- controladores fuzzy para a soluo de diferentes pro-
do foi adotado um mtodo para o processo de deciso blemas de controle a partir da seleo de um desses
baseado em regras do tipo SE A ENTO B, nas tipos bsicos. A escolha do tipo de controlador a ado-
quais tanto o antecedente quanto o conseqente so tar e, na seqncia, a forma de implementao dos
valores de variveis lingsticas, expressos por meio seus diferentes componentes, exige do projetista um
conhecimento geral dos aspectos tericos envolvidos
em cada soluo possvel e, alm disso, uma prvia
1
Michelle Andrade, Departamento de Engenharia Civil e Ambien- noo do impacto de cada escolha (tipo de controlador
tal, Faculdade de Tecnologia, Universidade de Braslia. Braslia,
DF, Brasil (e-mail: maccivil@gmail.com). e implementao dos componentes) sobre a resposta
2
Maria Alice Prudncio Jacques, Departamento de Engenharia do controlador e sobre a eficcia do controle por ele
Civil e Ambiental, Faculdade de Tecnologia, Universidade de Bras- produzido.
lia. Braslia, DF, Brasil (e-mail: mapj@unb.br).
No caso dos controladores semafricos fuzzy, cujo
Manuscrito recebido em 8/7/2008 e aprovado para publicao em primeiro modelo foi desenvolvido por Pappis e Mam-
9/10/2008. Este artigo parte de TRANSPORTES, volume XVI, dani (1977), a literatura mostra que a maioria dos tra-
nmero 2, de dezembro de 2008. ISSN: 1415-7713.
24 TRANSPORTES, v. XVI, n. 2, p. 24-31, dezembro 2008
balhos adotou o controlador tipo Mamdani, pelo me- que so baseados nas funes de implicao fuzzy e
nos em termos conceituais gerais, especificando as em operadores de composio para a definio da sa-
sadas das regras como conjuntos fuzzy (Jacques et al., da fuzzy do controlador. J os do segundo grupo dis-
2002a). Enquanto anlises sobre o impacto das dife- pensam a definio de funes de implicao e opera-
rentes possibilidades de implementao de alguns e- dores para a inferncia. Os controladores do tipo
lementos do controlador semafrico fuzzy podem ser Mamdani, referidos nesta seo como controlador de
encontradas na literatura (Jacques et al., 2002b, 2002c Mamdani, so baseados no primeiro grupo, e os con-
e 2003), estudos voltados avaliao do impacto da troladores do tipo desenvolvido por Takagi e Sugeno,
escolha do tipo bsico do controlador no desenvolvi- aqui referidos como controlador de Sugeno, fazem
mento de controladores semafricos fuzzy no encon- parte do segundo grupo.
tram-se disponveis. Nos dois tipos de controladores a ao de controle
O objetivo do presente trabalho dar continuidade obtida por meio da definio de um conjunto de ins-
aos estudos realizados no mbito da Universidade de trues (ou regras) de controle fuzzy, isto de um al-
Braslia e da Universidade de Tecnologia de Helsinki goritmo fuzzy. Essas regras so do tipo GMP (Genera-
para o desenvolvimento de controladores semafricos lized Modus Ponens), e uma dada regra (Ri) pode ser
fuzzy para intersees isoladas, por meio da investiga- apresentada como:
o do efeito provocado pela escolha do tipo do con-
trolador (Mamdani ou Sugeno) sobre a resposta do Antecedente: x A e y B
dispositivo s solicitaes do trfego e sobre o desem- Regra (Ri): se x Ai e y Bi ento z Ci
penho do fluxo de trfego. Apresenta, inicialmente, Conseqente: z Ci
uma descrio dos controladores de Mamdani e de
Sugeno, expondo suas diferenas conceituais e indi- onde x and y so variveis lingsticas relacionadas ao
cando como eles podem ser implementados com o estado do processo e z a varivel lingstica de con-
auxilio de um programa computacional que disponha trole; A, Ai, B, Bi, Ci e Ci so conjuntos fuzzy de x, y
de recursos especficos para este fim, como o caso e z nos universos de discurso U, V e W, respectiva-
do programa MATLAB (MathWorks, 2008). Na se- mente. Como ser apresentado a seguir, no caso do
qncia, o estudo de caso realizado para investigar o controlador de Sugeno, o conseqente da regra no
impacto dos dois tipos de controladores descrito. Foi um conjunto fuzzy.
analisada a operao de uma interseo isolada for-
2.1. Controlador de Mamdani
mada por duas vias de sentido nico de circulao,
uma via principal e outra secundria, sob trs nveis Este controlador tem como base o trabalho pioneiro de
diferentes de volume de trfego. A anlise efetuada Mamdani, publicado em 1973 (Mamdani, 1973). No
a partir dos resultados da simulao da operao do algoritmo fuzzy do controlador, cada regra uma pro-
trfego, realizada com o uso do programa HUTSIM posio condicional fuzzy, e diferentes relaes fuzzy
(Kosonem, 1999). em U x V x W podem ser dela derivadas.
Os estudos relacionados ao emprego de controlado- A implementao de cada regra feita mediante a
res semafricos fuzzy para o controle de intersees definio de operadores para o processamento do an-
isoladas, tanto com base em simulaes da operao tecedente da regra e da funo de implicao que ir
do trfego quanto em alguns testes de campo, tm a- definir o seu conseqente. A ao do controlador fuzzy
presentado resultados promissores (Niittymki e Ne- definida pela agregao das n regras Ri que com-
vala, 2001). Assim, contribuies ao aperfeioamento pem o algoritmo, mediante o uso do conectivo tam-
do processo de desenvolvimento desses controladores, bm, o qual pode ser implementado por diferentes
como a descrita no presente trabalho, se revestem de operadores. Esta agregao resulta no conjunto fuzzy
importncia no contexto atual da demanda dos gesto- C, que define a sada do controlador C. A sada efetiva
res de trfego por dispositivos de controle cada vez do controlador ento obtida por meio de um proces-
mais eficazes. so de defuzificao aplicado ao conjunto C.
As diferentes possibilidades para a implementao
dos conectores das regras, das funes de implicao e
2. TIPOS DE CONTROLADORES FUZZY do processo de defuzificao so amplamente discuti-
Os controladores fuzzy descritos na literatura so clas- das na literatura (ver, por exemplo, Lee 1990a e
sificados em funo das caractersticas gerais do seu 1990b) e no sero tratadas no presente trabalho. O
mtodo de tomada de deciso. Embora diferentes m- impacto da adoo de algumas dessas possibilidades,
todos sejam apresentados na literatura (ver Lee, e da definio dos conjuntos fuzzy associados s vari-
1990b), de acordo com Sugeno (1985) eles podem ser veis de entrada do controlador semafrico fuzzy, fo-
reunidos em dois grandes grupos. O primeiro rene os ram objeto de pesquisas anteriores (Jacques et al.,
TRANSPORTES, v. XVI, n. 2, p. 24-31, dezembro 2008 25
2002b, 2002c, 2003; Vaz, 2006). ficam desabilitados. O programa apresenta diferentes
opes ao usurio para a configurao dos componen-
2.2. Controlador de Sugeno
tes do sistema e, para a maioria dos campos, tambm
O controlador de Sugeno (Takagi e Sugeno, 1983) permite a definio de outras alternativas.
consiste numa simplificao do controlador de Mam-
dani, onde o conseqente de cada regra definido
como uma funo das variveis lingsticas de entra- 3. ESTUDO DE CASO
da. Isto , a regra geral Ri pode ser escrita como: A avaliao do desempenho dos controladores de
Mamdani e Sugeno foi realizada a partir da implemen-
Regra (Ri): se x Ai e y Bi ento z = fi (x, y) tao de dois controladores de cada tipo, definidos
com base em elementos bsicos comuns. O funciona-
O resultado de cada regra , portanto, um valor nu- mento dos controladores foi ento testado para o con-
mrico (no um conjunto fuzzy), que assume como trole de uma interseo isolada formada por duas vias
peso o valor da pertinncia resultante do processamen- de sentido nico, uma principal e outra secundria.
to do antecedente da regra. Essa determinao dispen- Este teste foi realizado atravs da simulao da opera-
sa, portanto, a definio de uma funo de implicao o do trfego no local, com o auxlio do programa
especfica. A resposta final do controlador obtida HUTSIM (Kosonen, 1999).
pela mdia ponderada das respostas das regras indivi- 3.1. Descrio das caractersticas gerais do
duais. Isto , neste tipo de controlador no cabe pro- controlador semafrico fuzzy
cesso de defuzificao.
O controlador bsico, que foi implementado posteri-
O valor de z pode tambm ser definido como um
ormente como controlador de Mamdani e Sugeno,
valor constante, que pode ser interpretado como um
possui as caractersticas bsicas a seguir descritas.
conjunto fuzzy com a caracterstica especial de apre-
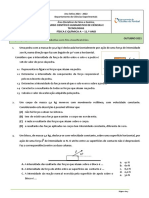
sentar um nico valor com pertinncia igual a um e 3.1.1. Variveis de entrada e sada do
todos os demais com pertinncia zero. Este tipo de controlador
conjunto fuzzy denominado singleton, e o seu em- As variveis que descrevem o estado do sistema a ser
prego permite a definio de regras com valores de controlado (variveis de entrada) so Fila (na apro-
sada que representam uma classificao da resposta ximao que est recendo indicao vermelha) e
do controlador, sem alterar a forma simplificada da Chegada (nmero de veculos presentes nos 100 m
determinao da resposta final do controlador. prximos linha de reteno da aproximao que est
2.3. Implementao dos controladores em recebendo sinal verde). A varivel Fila pode assu-
programa computacional mir os valores pequena, mdia, longa e qual-
quer, que so definidos como conjuntos fuzzy. No
A implementao de um controlador fuzzy, para fins
caso da varivel Chegada, os valores possveis so
de utilizao efetiva, requer o uso de programas com-
zero, pouca, mdia, muita e qualquer. Os
putacionais. Atualmente, alguns programas de uso
conjuntos fuzzy associados a estas variveis, mostra-
geral dispem de mdulos especficos para facilitar a
dos na Figura 1, so os mesmos definidos no estudo
realizao desta tarefa, como o caso do Fuzzy Logic
de Santos (2003), mais especificamente, o Caso 4 de-
Toolbox do MATLAB, usado neste trabalho para
finido naquele trabalho. Dentre os casos estudados por
implementar os dois tipos de controladores em estudo.
Santos (2003) o Caso 4 apresentou os melhores resul-
O programa permite ao usurio definir os quatro
tados nas simulaes realizadas em termos de atrasos
componentes principais do sistema de inferncia fuzzy,
e paradas veiculares. Estes conjuntos so derivados do
que so: fuzificao dos valores das variveis de en-
controlador bsico utilizado no trabalho de Andrade e
trada e aplicao dos operadores que podem estar pre-
Jacques (2005), definidos a partir do estudo de
sentes no antecedente das regras (e e ou); impli-
Niittymki e Pursula (2000). J a varivel que descre-
cao do antecedente sobre o conseqente (funo de
ve a sada do controlador denominada Extenso, e
implicao); agregao dos conseqentes de todas as
pode assumir os valores zero, curta, mdia e
regras definidas; e a defuzificao do conjunto C de
longa. Os conjuntos fuzzy que representam esses
resposta. No MATLAB, antes de iniciar a definio valores so definidos de forma diferente para os dois
dos componentes do sistema, o usurio deve indicar se tipos controladores e sero posteriormente apresenta-
o seu controlador do tipo Mamadani ou Sugeno. De- dos.
pendendo do tipo selecionado, so liberados os cam-
pos pertinentes para a entrada dos dados. Isto , se for
selecionado o controlador de Sugeno, por exemplo, os
campos referentes funo de implicao, ao termo
de agregao tambm e ao mtodo de defuzificao
26 TRANSPORTES, v. XVI, n. 2, p. 24-31, dezembro 2008
(a) Conjuntos fuzzy da varivel Fila (b) Conjuntos fuzzy da varivel Chegada
Figura 1: Conjuntos fuzzy de entrada do controlador bsico
c) se uma extenso for calculada como inferior a 2
3.1.2. Base de regras
(dois) segundos, a extenso concedida mas, ao
O conjunto de regras utilizado para o desenvolvimen- seu final, nenhuma outra extenso possvel.
to dos dois controladores o apresentado na Tabela 1,
formado por 14 regras. Esta base de regras tambm foi 3.2. Descrio do controlador do tipo
empregada no trabalho de Andrade e Jacques (2005). Mamdani
Os controladores de Mamdani testados (Controladores
Tabela 1: Base de regras adotada
1 e 3), alm dos aspectos bsicos j descritos, tiveram
Regra Se a Fila e a Chegada Ento a Extenso os valores de suas variveis de sada definidos pelos
1 Qualquer Zero Zero conjuntos fuzzy mostrados na Figura 2.
2 Pequena Pouca Curta
3 Mdia Pouca Zero A funo de implicao adotada foi a de Mamdani,
4 Longa Pouca Zero implementada com o operador mnimo, e o mtodo
5 Pequena Mdia Mdia
6 Mdia Mdia Curta
de defuzificao adotado foi o mtodo do centro de
7 Longa Mdia Curta gravidade, que assegura uma superfcie de controle
8 Pequena Muita Longa suave e contnua. Na Figura 3 so apresentadas, a ttu-
9 Mdia Muita Mdia
10 Longa Muita Mdia lo de ilustrao, a base de regras implementada no
11 - Pouca Curta MATLAB e a superfcie de resposta correspondentes
12 - Mdia Mdia
13 - Muita Longa ao Controlador 3.
14 Longa Qualquer Zero Os Controladores 1 e 3 apresentam como principal
diferena o comprimento das suas extenses de tempo
Para a implementao do antecedente das regras nos de verde, fruto da partio diferenciada do universo de
dois controladores foi utilizado o operador mnimo discurso da varivel extenso, na definio dos con-
para o conectivo e. juntos fuzzy a ela associados em cada controlador (ver
3.1.3. Condies gerais da operao Figura 2). O Controlador 3 responde com extenses
maiores, especialmente para chegadas veiculares pe-
Na operao do controlador simulada no programa
quenas.
HUTSIM, os seguintes procedimentos so adotados:
a) tempo mnimo de verde igual a 5 segundos para
as duas aproximaes;
b) mximo de 5 (cinco) extenses sucessivas de
verde para cada aproximao;
(a) Controlador 1 (b) Controlador 3
Figura 2: Conjuntos fuzzy da varivel de sada do controlador de Mamdani
TRANSPORTES, v. XVI, n. 2, p. 24-31, dezembro 2008 27
(a) Regras (b) Superfcie de controle
Figura 3: Base de regras e Superfcie de resposta do Controlador 3
tinncia 1 so superiores no Controlador 4, na ordem
3.3. Descrio do controlador do tipo Sugeno
de 66%.
Para efeito da descrio do controlador de Sugeno, A base de regras e a respectiva superfcie de respos-
cabe apenas acrescentar que, em conjunto com as ca- ta do Controlador 4, implantado no MATLAB, so
ractersticas descritas na seo 3.1, a varivel de sada apresentadas na Figura 5 a ttulo de exemplo do fun-
foi definida com base nos conjuntos singleton mostra- cionamento do controlador de Sugeno.
dos na Figura 4.
Os conjuntos singletons da varivel extenso foram 3.4. Caractersticas da situao de controle
definidos a partir dos pontos de mximo da mesma considerada
varivel dos controladores do tipo Mamdani (contro- Conforme j mencionado nos itens anteriores, o con-
ladores 1 e 3), os quais j foram utilizados em estudos trole realizado sobre uma interseo isolada, com
anteriores tais como o de Bingham (1998) e de An- duas vias de aproximao perpendiculares, compostas
drade e Jacques (2005). Assim, os Controladores 2 e 4 de duas faixas de trnsito de sentido nico. A veloci-
tambm diferem entre si somente quanto aos conjun- dade operacional da via de 60 km/h e o trfego
tos fuzzy da varivel extenso, cujos valores com per- composto apenas de carros de passeio.
(a) Controlador 2 (b) Controlador 4
Figura 4: Valores da varivel de sada do controlador de Sugeno
(a) Regras (b) Superfcie de controle
Figura 5: Base de regras e superfcie de resposta do Controlador 4
28 TRANSPORTES, v. XVI, n. 2, p. 24-31, dezembro 2008
Foram realizadas 10 simulaes de 1 hora para cada las 3 e 4 os resultados dos testes realizados so apre-
um dos controladores testados e para cada nvel de sentados em termos de S, para indicar diferenas
volume estudado (Tabela 2), totalizando 120 horas de significativas, e NS, caso contrrio.
simulao.
4.1. Controladores 1 e 2
Tabela 2: Tabela 2: Volumes de trfego simulados (dados em O desempenho do trfego, analisado atravs das vari-
veculos/hora)
veis atraso mdio e percentual de paradas veicula-
Volume Via principal Via secundria TOTAL res, foi melhor sob o controle do tipo Sugeno, espe-
Baixo 600 200 800 cialmente para os volumes alto e mdio. Tal vantagem
Mdio 1.200 400 1.600 foi verificada tanto para a interseo como um todo,
Alto 1.800 600 2.400
quanto para a as aproximaes consideradas individu-
almente (via principal e via secundria). Destes resul-
O controle semafrico estabelecido na simulao tados, apenas em um caso (paradas veiculares para a
bifsico para uma interseo isolada totalmente atuada via secundria sob volume alto) o controlador de
sob o modo de controle fuzzy. Foram testados quatro Mamdani apresentou resultados melhores, sendo que a
controladores fuzzy, sendo dois do tipo Mamdani diferena observada para o controlador de Sugeno,
(Controladores 1 e 3) e dois do tipo Sugeno (Contro- para este caso, foi no significativa sob o teste de hi-
ladores 2 e 4). ptese realizado (Tabela 3). Para o volume baixo os
Atravs da anlise das superfcies de resposta dos resultados mostram que o controlador de Sugeno ten-
Controladores 3 e 4, observa-se que o controlador do de a beneficiar a via secundria, trazendo prejuzo
tipo Sugeno (com varivel de sada singletons) tende a para a via principal, e conseqentemente, para a inter-
dar extenses menores que seu correspondente com seo.
sada do tipo fuzzy (controlador de Mamdani).
Tabela 3: Diferena percentual entre os resultados dos
controladores 1 e 2, e significncia segundo o teste de
4. RESULTADOS OBTIDOS Hiptese
Controladores 1 e 2 Diferena Percentual (DP)
As anlises foram realizadas por pares de controlado- Varivel Aproximao V. Alto V. Mdio V. Baixo
res: Controladores 1 e 2 (Tabela 3), e Controladores 3 -10.7 -4.4 2.3
Interseo
e 4 (Tabela 4). S S NS
As diferenas percentuais dos valores mdios dos ATRASO Via -12.0 -1.7 8.9
MDIO Principal S NS S
resultados de simulao para os pares de controladores (s) Via -8.5 -9.3 -14.2
foram apresentadas no sentido de facilitar as anlises Secundria S S S
comparativas. Para este fim, o controlador de Mamda- Interseo
-8.0 -3.0 3.7
S NS S
ni foi adotado como o elemento de referncia para o
PARADAS Via -12.9 -2.5 10.9
estudo proposto (ver Equao 1). VEICULARES Principal S NS S
VS i VM i ( %) Via 0.4 -4.0 -12.1
DP = 100 (1) Secundria NS NS S
VM i Via -18.5 -21.3 -19.2
VERDE Principal S S S
onde, DP: diferena percentual; MDIO Via -25.9 -16.3 -3.6
VSi: valor mdio da varivel i fornecido pelo (s) Secundria S S S
controlador Sugeno; COMPRIMENTO
Interseo
-17.0 -14.4 -8.1
VMi: valor mdio da varivel i fornecido pelo DE CICLO (s) S S S
controlador de Mamdani. S: diferena significativa; NS: diferena no-significativa
Foram realizados, tambm, testes de hiptese de i-
gualdade entre mdias para a avaliao da diferena Na anlise da resposta do controlador, os resultados
dos controladores testados em termos de medidas de apresentaram diferenas significativas, para um nvel
desempenho do trfego (atraso mdio e nmero de de significncia de 5%. Pode ser observado que tanto
paradas veiculares) e da resposta dos controladores os tempos mdios de verde quando o ciclo mdio fo-
(tempo mdio de verde e comprimento mdio de ci- ram maiores para os controladores do tipo Mamdani.
clo). Para tanto, foi adotado o nvel de significncia Sendo assim, fica evidente que o tipo de controlador
= 5%. Para a realizao dos testes, os resultados de utilizado impacta significativamente na resposta do
simulao (10 horas para cada caso) podem ser consi- controlador (tempo de verde e tempo de ciclo).
derados conjuntos de dados emparelhados para cada 4.2. Controladores 3 e 4
hora de simulao independente, uma vez que o simu- Ao avaliar as medidas de desempenho do trfego, por
lador utilizado permite gravar um padro de chegadas meio das diferenas percentuais de atraso mdio e de
veiculares e reutiliz-lo para vrios testes. Nas Tabe-
TRANSPORTES, v. XVI, n. 2, p. 24-31, dezembro 2008 29
paradas veiculares para esse par de controladores, ob- Mamdani ou Sugeno.
servou-se que o controlador de Sugeno (Controlador
3) apresentou melhores resultados para a maioria das Para as condies de trfego analisadas (volumes e
situaes avaliadas, com apenas dois resultados con- caractersticas gerais da interseo considerada) o
trrios, sendo que um deles foi no significativo (Ta- controlador do tipo Sugeno apresentou melhores re-
bela 4). sultados sob o desempenho do trfego, bem como me-
nores tempo de verde e de ciclo, para os volumes ana-
Tabela 4: Diferena percentual entre os resultados dos lisados. No entanto, como existe a interao entre tipo
controladores 3 e 4, e significncia segundo o teste
de Hiptese
de controlador e volume, a deciso pela escolha do
Controladores 3 e 4 Diferena Percentual (DP)
controlador tipo Sugeno deve ser precedida de uma
Varivel Aproximao V. Alto V. Mdio V. Baixo avaliao preliminar para verificar se, para o caso
Interseo
-23.2 -20.2 -9.1 considerado esse tipo de controlador , efetivamente,
S S S o mais apropriado. Para tanto, um estudo nos moldes
ATRASO Via -28.7 -22.7 -1.1
MDIO Principal S S NS
do realizado no presente artigo recomendado.
(s) Via -11.8 -15.1 -24.4 Vale ressaltar que as vantagens dos controladores
Secundria S S S do tipo Sugeno sobre os do tipo Mamdani observadas
-15.6 -13.9 -2.1 nesse estudo devem ser somadas s vantagens de con-
Interseo
S S NS
cepo destes controladores, uma vez que possuem
PARADAS Via -24.6 -20.3 3.8
VEICULARES Principal S S NS menos elementos a serem definidos. A funo de im-
( %) Via 2.9 -2.1 -12.8 plicao e os mtodos de defuzificao so elementos
Secundria S* NS S dispensveis na concepo dos controladores do tipo
Via -20.9 -33.7 -41.9 Sugeno e, como pode ser observado na literatura (Jac-
VERDE Principal S S S
ques et al, 2002b e 2002c), impactam significativa-
MDIO Via -39.2 -42.9 -27.9
(s) Secundria S S S mente no processo do controle realizado.
COMPRIMENTO -23.8 -30.5 -27.1 importante dar continuidade aos estudos relacio-
Interseo
DE CICLO (s) S S S nados comparao dos controladores de Mamdani e
S: diferena significativa; NS: diferena no-significativa Sugeno avaliando condies geomtricas e operacio-
*: caso significativo desfavorvel ao controlador Sugeno nais diferentes das consideradas nesse estudo. Varia-
es dos volumes mdios de trfego, movimentos de
As diferenas relativas resposta dos controladores
converso e a operao em rede devem ser considera-
(verde mdio e comprimento de ciclo) foram todas
dos em estudos futuros.
significativas, e em todos os resultados as medidas do
controlador de Sugeno foi menor. Novamente, com-
prova-se a influncia do tipo de controlador utilizado REFERNCIAS BIBLIOGRFICAS
na resposta de controle, bem como no desempenho do Andrade, M.; Jacques, M. A. P. (2005) Estudo para aprimoramento da
operao de controladores semafricos fuzzy. In: XIX ANPET-
trfego. Congresso de Pesquisa e Ensino em Transportes, 2005, Recife.
Os resultados obtidos (Tabelas 3 e 4) permitem ain- Rio de Janeiro: ANPET, 2005. v. 1. p. 817-828.
Bingham, E. (1998) Neurofuzzy Traffic Signal Control. Department of
da concluir que o desempenho do trfego , tambm, Engineering Physics and Mathematics. Helsinki Univerity of Tec-
afetado pela interao entre o tipo de controlador uti- nology.
Jacques, M.A.P., J. Niittymki, and M. Pursula (2002a) Analysing Diffe-
lizado e os volumes a serem controlados. Atravs da rent Fuzzy Traffic Signal Controllers for Isolated Intersections.
realizao de uma Anlise de Varincia, considerando Paper accepted for presentation at TRB 81st Annual Meeting. Ja-
os fatores Controlador e Volume, ficou efetiva- nuary 13-17, 2002, Washington, DC.
Jacques, M. A. P.; J. Nittymki; M. Pursula, e I. Kosonen (2002b) The
mente comprovada a interao entre os fatores ao n- impact of different approximate reasoning methods on fuzzy sig-
vel de significncia de 5%, exceto para o atraso mdio nal controllers. Anais do 13th Mini-Euroconference, 10 a 13 de
Junho de 2002, Bari Itlia, p.184 192.
na via secundria. Jacques, M. A. P.; J. Nittymki; M. Pursula, e I. Kosonen (2002c) Analysis
of Different Defuzzyfication Methods Applied to Fuzzy Signal
Controller. In: XII Congresso Panamericano de Ingeniera de
5. CONCLUSES Trnsito y Transport. Quito Equador.
Jacques, M. A. P.; D. B. L. M. Santos, M. Pursula e I. Kosonen (2003)
Diante dos resultados obtidos neste estudo possvel Studying the Importance of Fuzzy Sets Definitions for Fuzzy Sig-
observar que diferentes tipos de controladores impac- nal Controllers. In: Fourth International Symposium on Uncerta-
inty Modeling and Analysis INSUMA 2003, Maryland, USA, p.
tam de modo significativo tanto na resposta do contro- 64 69.
lador, como tambm no desempenho do trfego. Sen- Kikuchi, S. (1991) Aplication of fuzzy set theory to the analysis of trans-
do assim, de suma relevncia a ateno do projetista portation problems. In: Second International Conference on Ap-
plications of Advanced Technologies in Transportation Enginne-
na construo do controlador fuzzy, dentre os diversos ring. Minneapolis, Minnesota, August 18-21, 1991.
aspectos j apresentados na literatura, para a definio Kosonen, I. (1999) HUTSIM Urban Traffic Simulation and Control
Model: Principles and Applications. Publication 100, Helsinki
do tipo de controlador a ser utilizado se do tipo
30 TRANSPORTES, v. XVI, n. 2, p. 24-31, dezembro 2008
University of Technology, Transportation Engineering, Espoo,
Finland, 1999, 248 p.
Lee, C. C. (1990a) Fuzzy Logic in Control Systems: Fuzzy Logic Control-
ler, Part I. IEEE Transactions on Systems, Man, and Cybernetics,
Vol. 20, No. 2, March/April 1990, pp. 404 418.
Lee, C. C. (1990b) Fuzzy Logic in Control Systems: Fuzzy Logic Control-
ler, Part II. IEEE Transactions on Systems, Man, and Cybernetics,
Vol. 20, No. 2, March/April 1990, pp. 419 435.
Mamdani, E. H. (1973) Aplications of fuzzy algorithms for control of
simple dynamic plant. Proc. IEEE 121, vol. 12, p. 1585-1588.
Mamdani, E. H. e Assilian S. (1975) An experiment in linguistic synthesis
with a fuzzy logic controller. Int. J. Man-Machine Studies, vol. 7,
p. 1-13.
MathWorks (2008) Getting Started Guide. Matlab7.
Niittymki, J. and M. Pursula (2000) Signal Control Using Fuzzy Logic.
Fuzzy Sets and Systems, Vol. 116, pp.11-22.
Niittymki, J. and R. Nevala (2001) Fuzzy Adaptive Traffic Signal Control
Principles and Results. In: Joint 9th IFSA World Congress and
20th NAFIPS International Conference, Vancouver, Canada, July
2001, 6 p.
Pappis, C. P.; H. Mamdani (1977) A Fuzzy Logic Controller for Traffic
Junctions. IEEE Transactions on Systems, Man and Cybernetics.
Vol. SMC-7, N 10.
Santos, D, B, (2003) Procedimento para a Construo dos Conjuntos
Fuzzy Utilizados em Controladores Semafricos, Dissertao de
Mestrado,Universidade de Braslia, Braslia, DF.
Sugeno, M. (1985). An introductory survey of fuzzy control. Information
Sciences 36, p. 59-83.
Takagi, T. e Sugeno M. (1983) Derivation of fuzzy control rules from
human operators control action. IFAC Symposium on Fuzzy In-
formation, Knowledge Representation and Decision Analysis,
Marseille, p. 55-60.
Vaz, A M (2006) Estudos das Funes de pertinncia para conjuntos fuzzy
utilizados em Controladores Semafricos Fuzzy. Dissertao de
Mestrado, Departamento de Engenharia Civil e Ambiental, Facul-
dade de Tecnologia Universidade de Braslia, DF, 158 p.
Zadeh, L. A. (1973) Outline of a new approach to the analysis of complex
systems and decision processes. IEEE Transactions on Systems,
Man, and Cybernetics, Vol. SMC-3, No. 1, p. 28-44.
Zimmermann, H.-J. (1996) Fuzzy Set Theory and Its Applications. 3rd
Edition. Kluwer Academic Publishers.
TRANSPORTES, v. XVI, n. 2, p. 24-31, dezembro 2008 31
Вам также может понравиться
- NBR 5410 2004 Corrigida 2008Документ217 страницNBR 5410 2004 Corrigida 2008sgrinev100% (8)
- Eso 6106 PTДокумент109 страницEso 6106 PTKleber100% (9)
- ASME B16.5-1996 - Norma para Flanges de TubulaçãoДокумент147 страницASME B16.5-1996 - Norma para Flanges de Tubulaçãodssscarface100% (2)
- Anexo 01 - Bomba Centrifuga KSB Meganorm 80-200 PDFДокумент20 страницAnexo 01 - Bomba Centrifuga KSB Meganorm 80-200 PDFAndre LagoОценок пока нет
- Ampliação do Presídio Rorenildo Rocha Leão em Palmares - PEДокумент5 страницAmpliação do Presídio Rorenildo Rocha Leão em Palmares - PElinspauloОценок пока нет
- Dimensionamento de Vigas para FlexãoДокумент9 страницDimensionamento de Vigas para Flexãorenatos79100% (1)
- 1994 Matematica AFAДокумент2 страницы1994 Matematica AFAReforço Multidisciplinar Aulas ParticularesОценок пока нет
- ELETROMECAN WGR Reatores e IgnitoresДокумент6 страницELETROMECAN WGR Reatores e IgnitoresDione SantosОценок пока нет
- IMBIL - Bombas Linha ITAP PDFДокумент13 страницIMBIL - Bombas Linha ITAP PDFlinspauloОценок пока нет
- Mdulo f4 CircuitoselectricoДокумент11 страницMdulo f4 CircuitoselectricoMaria Papoila CrisОценок пока нет
- Regras de segurança contra incêndio do governo de PernambucoДокумент109 страницRegras de segurança contra incêndio do governo de PernambucoBreno NotaroОценок пока нет
- Os seis critérios técnicos para dimensionamento de condutores elétricosДокумент27 страницOs seis critérios técnicos para dimensionamento de condutores elétricosWender MartinsОценок пока нет
- Ndee - 3 - BT - Edificacao Coletiva - Dezembro - 2013 PDFДокумент123 страницыNdee - 3 - BT - Edificacao Coletiva - Dezembro - 2013 PDFlinspauloОценок пока нет
- Ndee 1 MT Versao Dezembro 2013Документ100 страницNdee 1 MT Versao Dezembro 2013linspauloОценок пока нет
- Projeto Rede Distribuição Aérea CompactaДокумент102 страницыProjeto Rede Distribuição Aérea CompactalinspauloОценок пока нет
- SikaGrout 214 (15 12 2014)Документ5 страницSikaGrout 214 (15 12 2014)linspauloОценок пока нет
- Ndee 1 MT Versao Dezembro 2013Документ100 страницNdee 1 MT Versao Dezembro 2013linspauloОценок пока нет
- Projeto de rede elétrica compacta 15 kVДокумент97 страницProjeto de rede elétrica compacta 15 kVlinspauloОценок пока нет
- Ndee - 2 - BT - Edificacao Individual - Versao - Dezembro - 2013 PDFДокумент151 страницаNdee - 2 - BT - Edificacao Individual - Versao - Dezembro - 2013 PDFlinspauloОценок пока нет
- Curvas 60Hz 2748 460 01 PB-KSBДокумент142 страницыCurvas 60Hz 2748 460 01 PB-KSBeltroboltzОценок пока нет
- NOR - DISTRIBU-ENGE-0023 - Fornecimento de Energia Elétrica em Media Tensão de Distribuição A Edificação Individual - REV 01 PDFДокумент82 страницыNOR - DISTRIBU-ENGE-0023 - Fornecimento de Energia Elétrica em Media Tensão de Distribuição A Edificação Individual - REV 01 PDFlinspauloОценок пока нет
- Disjuntores 3RVДокумент63 страницыDisjuntores 3RVemtmediaОценок пока нет
- Conectores AterramentoДокумент84 страницыConectores AterramentotonhofabioОценок пока нет
- FossaДокумент2 страницыFossalinspauloОценок пока нет
- 2017.02.27 Ewerton - DissertaçãoДокумент85 страниц2017.02.27 Ewerton - DissertaçãolinspauloОценок пока нет
- Cap 02. História e Evolução Das RedesДокумент26 страницCap 02. História e Evolução Das RedeslinspauloОценок пока нет
- VDI SOHO soluçõesДокумент12 страницVDI SOHO soluçõeslorentz franklinОценок пока нет
- Calculo Do Condutor de Aterramento 3pgДокумент3 страницыCalculo Do Condutor de Aterramento 3pgaesbОценок пока нет
- NBR 5419 NB 165 - Protecao de Estruturas Contra Descargas Atmosfericas PDFДокумент32 страницыNBR 5419 NB 165 - Protecao de Estruturas Contra Descargas Atmosfericas PDFjamesantosОценок пока нет
- Apostila Revit 2015 Maio 2016Документ78 страницApostila Revit 2015 Maio 2016Nayara PaulaОценок пока нет
- Sistemas Fuzzy: Uma Introdução à Teoria dos Conjuntos Fuzzy e Lógica FuzzyДокумент35 страницSistemas Fuzzy: Uma Introdução à Teoria dos Conjuntos Fuzzy e Lógica Fuzzyfranciscojunior45Оценок пока нет
- 02 Faltas BalanceadasДокумент22 страницы02 Faltas BalanceadaslinspauloОценок пока нет
- Abordagem Econômica Da Qualidade FinalДокумент24 страницыAbordagem Econômica Da Qualidade FinallinspauloОценок пока нет
- Tabela de Barramentos IIДокумент1 страницаTabela de Barramentos IIAlexandre VieiraОценок пока нет
- Matemática - Produtos Notáveis e RacionalizaçãoДокумент8 страницMatemática - Produtos Notáveis e RacionalizaçãoAcibnetОценок пока нет
- Introd A Programação Exerc ResolvidosДокумент227 страницIntrod A Programação Exerc ResolvidosErivaldo Filho Pereira Do NascimentoОценок пока нет
- Manual Da Bimby T31Документ52 страницыManual Da Bimby T31batchcomОценок пока нет
- Manual Do Inversor de FreqüênciaДокумент27 страницManual Do Inversor de FreqüênciaWilson Francisco HeckОценок пока нет
- Receitas Clara Sousa FacebookДокумент107 страницReceitas Clara Sousa Facebookdaniela558Оценок пока нет
- Cálculo matemáticoДокумент1 страницаCálculo matemáticoJosé Alair Da Silva JúniorОценок пока нет
- Riscos elétricos e mecânicos em instalações, máquinas e equipamentosДокумент55 страницRiscos elétricos e mecânicos em instalações, máquinas e equipamentosJosélia Fátima Carnielo Dias100% (1)
- CRL1509Документ2 страницыCRL1509Luis Miguel Vergara Gonzalez100% (1)
- Extrusora de Plástico e Inversor de FrequênciaДокумент12 страницExtrusora de Plástico e Inversor de FrequênciaWagner LemesОценок пока нет
- Escavadeira Hidráulica Com Certificação Tier Iii: Cilindros Hidráulicos Motor Parte RodanteДокумент6 страницEscavadeira Hidráulica Com Certificação Tier Iii: Cilindros Hidráulicos Motor Parte RodantetfkrochaОценок пока нет
- Física e Química A - Força e MovimentoДокумент4 страницыFísica e Química A - Força e MovimentoMaria SilvaОценок пока нет
- 3serie - NOVOДокумент5 страниц3serie - NOVOMarcelia Lopes Azevedo de SiqueiraОценок пока нет
- Mistérios Desvelados - Ensinamentos Do Mestre Saint Germain (Processo Criativo)Документ5 страницMistérios Desvelados - Ensinamentos Do Mestre Saint Germain (Processo Criativo)Jônatas Duarte de CamposОценок пока нет
- Resolução de problema de calor e 1a lei da termodinâmicaДокумент2 страницыResolução de problema de calor e 1a lei da termodinâmicaSaturno FilhoОценок пока нет
- 6º MAT 1 SemanaДокумент2 страницы6º MAT 1 SemanaDiulyano L. FeitosaОценок пока нет
- Planejamento Anual - Matemática - 1 Série EMДокумент6 страницPlanejamento Anual - Matemática - 1 Série EMGabriel GuerraОценок пока нет
- Instrumentação Médico Hospitalar 2Документ6 страницInstrumentação Médico Hospitalar 2Jonathan ScottОценок пока нет
- Banco de dados questões consulta SQL seleçãoДокумент4 страницыBanco de dados questões consulta SQL seleçãoGuilherme SchuindtОценок пока нет
- dissertaCAO PDFДокумент260 страницdissertaCAO PDFAntonio Vieira MScОценок пока нет
- ARA 0018 Apresenta o SextaДокумент16 страницARA 0018 Apresenta o SextaPedro RodenbuschОценок пока нет
- Estudo dos gases: leis de Boyle, Charles e transformações isotérmica, isobárica e isovolumétricaДокумент10 страницEstudo dos gases: leis de Boyle, Charles e transformações isotérmica, isobárica e isovolumétricafranquimicoОценок пока нет
- FT 11 Sinter30Документ2 страницыFT 11 Sinter30metalografiaОценок пока нет
- Circuitos CA e Fasores: conceitos básicosДокумент30 страницCircuitos CA e Fasores: conceitos básicosWilsonSimonalОценок пока нет
- Matemática Financeira - Lista Exercícios Sistemas AmortizaçãoДокумент2 страницыMatemática Financeira - Lista Exercícios Sistemas AmortizaçãoJoana De Farias SouzaОценок пока нет
- Bolas carnes enchidosДокумент3 страницыBolas carnes enchidosJosé Torcato AlmeidaОценок пока нет