Вам также может понравиться
- Complete Removal and Rebuild of DPA 5 InstallationДокумент5 страницComplete Removal and Rebuild of DPA 5 InstallationAlex Robledo Olarte100% (2)
- e2gRuleWriter Decision Table Software - e2gRuleEngine Knowledge Base GeneratorДокумент20 страницe2gRuleWriter Decision Table Software - e2gRuleEngine Knowledge Base GeneratorFethiya AbdellaОценок пока нет
- Building Mobile Applications With TensorFlowДокумент64 страницыBuilding Mobile Applications With TensorFlowcidsantОценок пока нет
- Lenovo Yoga 700-14isk Byg43 Nm-A601 Rev 1.0 PDFДокумент46 страницLenovo Yoga 700-14isk Byg43 Nm-A601 Rev 1.0 PDFA Meza BautiztaОценок пока нет
- 1 8 TFT DisplayДокумент69 страниц1 8 TFT DisplayBen sayari Mohamed AmineОценок пока нет
- 945GCMX-S2-R66 - Schematic 070614Документ32 страницы945GCMX-S2-R66 - Schematic 070614resistranceОценок пока нет
- Deploying PeopleSoft Image and Using PUM To Apply UpdatesДокумент52 страницыDeploying PeopleSoft Image and Using PUM To Apply UpdatesPavan polum100% (1)
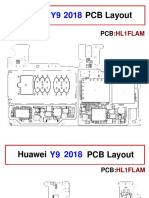
- Y9 2018 (Hl1flam) PCB LayoutДокумент2 страницыY9 2018 (Hl1flam) PCB LayoutFernando Cabrera100% (1)
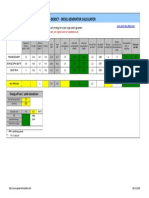
- Calculator Energy Genset Diesel Electric GeneratorДокумент1 страницаCalculator Energy Genset Diesel Electric GeneratorarunОценок пока нет
- Filter Kalman Vs ComplementaryДокумент20 страницFilter Kalman Vs ComplementaryDante Fajardo Olmos100% (1)
- Micro III Direct Communications SetupДокумент1 страницаMicro III Direct Communications SetupIre Erick100% (1)
- Sim7230 Hardware Design v1.02 PDFДокумент46 страницSim7230 Hardware Design v1.02 PDFCristian BandilaОценок пока нет
- Arduino Mega 2560Документ6 страницArduino Mega 2560GustavoMartinezОценок пока нет
- Foxconn H61MXE-K Schematic DiagramДокумент46 страницFoxconn H61MXE-K Schematic DiagramAcomputer NathonОценок пока нет
- 50 Most Frequently Used UNIX - Linux Commands (With Examples)Документ12 страниц50 Most Frequently Used UNIX - Linux Commands (With Examples)Toan Dang NhuОценок пока нет
- Complementary FilterДокумент6 страницComplementary Filterguerrez50% (6)
- How To Control A Stepper Motor With Arduino Motor Shield Rev3Документ33 страницыHow To Control A Stepper Motor With Arduino Motor Shield Rev3hakimОценок пока нет
- Advanced View Arduino Projects List - Use Arduino For Projects (2)Документ50 страницAdvanced View Arduino Projects List - Use Arduino For Projects (2)Bilal AfzalОценок пока нет
- Sonoff Dual Schematic 1Документ3 страницыSonoff Dual Schematic 1neluОценок пока нет
- Quartus InstallДокумент47 страницQuartus InstallRishabhBatraОценок пока нет
- PLC Con Atmega328p PDFДокумент1 страницаPLC Con Atmega328p PDFBrianWalterCastilloAlayoОценок пока нет
- Simple power supply circuit diagramДокумент3 страницыSimple power supply circuit diagramIanmochaОценок пока нет
- Solar Charger Made Simple Attiny85Документ1 страницаSolar Charger Made Simple Attiny85myEbooksОценок пока нет
- MOSHELL Commands v14Документ76 страницMOSHELL Commands v14Shyupomen Uz100% (1)
- ESP32 development board schematic diagramДокумент13 страницESP32 development board schematic diagramMarek DužíОценок пока нет
- PCB Design Tutorial With Eagle: Schematic". This Will Bring Up The Schematic EditorДокумент11 страницPCB Design Tutorial With Eagle: Schematic". This Will Bring Up The Schematic EditorEdward Robert Garcia LlontopОценок пока нет
- Lenovo X1 Corbon 12298-2Документ80 страницLenovo X1 Corbon 12298-2Ion PetruscaОценок пока нет
- Single Synchronous Buck Controller: RT8202/A/BДокумент18 страницSingle Synchronous Buck Controller: RT8202/A/BMax ReparОценок пока нет
- BP080WX7-100 20130805 201702209800Документ22 страницыBP080WX7-100 20130805 201702209800godzalli44Оценок пока нет
- Arduino 2wd Smart Robot Car Kit enДокумент8 страницArduino 2wd Smart Robot Car Kit enJeyson GuanoluisaОценок пока нет
- Howto Code - Blocks and AVR1 - 3Документ12 страницHowto Code - Blocks and AVR1 - 3Victor CamposОценок пока нет
- VDDC Vcc3V3-St: PWM - 100Hz/100Khz Hi: Max Lum Lo: Min LumДокумент13 страницVDDC Vcc3V3-St: PWM - 100Hz/100Khz Hi: Max Lum Lo: Min LumTavi DumitrescuОценок пока нет
- ARDUINO UNO DocumentДокумент25 страницARDUINO UNO DocumentAilapaka ManojОценок пока нет
- Setting-Up ArduCopter Electronics V 002Документ19 страницSetting-Up ArduCopter Electronics V 002Marco ReisОценок пока нет
- PT2272 PDFДокумент18 страницPT2272 PDFalperdaОценок пока нет
- Acer Aspire E5-575 735T DAZAAMB16E0 Quanta ZAA-x16 - Ironman - SK (ZAA) & Captain - SK (ZAAA) - 2016-0203-C-GerberДокумент48 страницAcer Aspire E5-575 735T DAZAAMB16E0 Quanta ZAA-x16 - Ironman - SK (ZAA) & Captain - SK (ZAAA) - 2016-0203-C-GerberThaigo Santos Vs Rosilânia100% (1)
- Wireless For The Warrior Pamphlet No. 7, Charging Set Lightweight 80 WattДокумент27 страницWireless For The Warrior Pamphlet No. 7, Charging Set Lightweight 80 WattLouis MeulsteeОценок пока нет
- Surfybear Jfet Reverb r3Документ5 страницSurfybear Jfet Reverb r3Alberto Desechable100% (1)
- Eagle TutorialДокумент7 страницEagle Tutorialsfrancois21Оценок пока нет
- Advanced View Pic Microcontroller Projects List - PIC MicrocontrollerДокумент206 страницAdvanced View Pic Microcontroller Projects List - PIC MicrocontrollerBilal AfzalОценок пока нет
- Arduino Timer InterruptsДокумент1 страницаArduino Timer InterruptseduardohcmendesОценок пока нет
- 04 Lenovo Air 15ITL 202 - LCFC NM-D211 SchematicДокумент59 страниц04 Lenovo Air 15ITL 202 - LCFC NM-D211 SchematicarminОценок пока нет
- DVOR Principle 코이카 양식Документ71 страницаDVOR Principle 코이카 양식Undral Batbayar100% (1)
- Industrial Quad Relay v2 Schematic CPC1020Документ1 страницаIndustrial Quad Relay v2 Schematic CPC1020Luis SandovalОценок пока нет
- Sony Bg3r Chassis Kvar29m60 ETДокумент294 страницыSony Bg3r Chassis Kvar29m60 ETsupertiger15Оценок пока нет
- ARDUINO ေရးသားနည္းДокумент81 страницаARDUINO ေရးသားနည္းAung Khine Htet0% (1)
- Description: 600-12010-BASE-QS1Документ24 страницыDescription: 600-12010-BASE-QS1jayixi4827100% (1)
- Ch341a Mini Flash ProgrammerДокумент5 страницCh341a Mini Flash ProgrammerLeoned Cova Orozco0% (1)
- ST Visual Develop (STVD)Документ363 страницыST Visual Develop (STVD)api-3697475Оценок пока нет
- SLDC008 LCD Diagnostic POST Card User ManualДокумент3 страницыSLDC008 LCD Diagnostic POST Card User ManualTonpitonpi Ton Pi0% (1)
- Cafeviva 20160212Документ498 страницCafeviva 20160212SamОценок пока нет
- Dell Inspiron E1505 - 6400 Service ManualДокумент57 страницDell Inspiron E1505 - 6400 Service Manualankurb.iimbОценок пока нет
- Arduino Voodoo AdapterДокумент4 страницыArduino Voodoo AdapterVasilis RiderОценок пока нет
- Nordic Semiconductor ASA nRF52840 Bluetooth Low Energy/ANT/802.15.4/2.4GHz RF Development Board (PCA10056Документ13 страницNordic Semiconductor ASA nRF52840 Bluetooth Low Energy/ANT/802.15.4/2.4GHz RF Development Board (PCA10056Thanga rajОценок пока нет
- IC 74XX SeriesДокумент34 страницыIC 74XX SeriesSandeep MishraОценок пока нет
- Redmi Note 8 (LLDM516) Schematic DiagramДокумент29 страницRedmi Note 8 (LLDM516) Schematic Diagramakash0% (1)
- Final Draft Specification - 15 Days LED Head LightДокумент13 страницFinal Draft Specification - 15 Days LED Head LightRahul Virat KumarОценок пока нет
- War Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsДокумент32 страницыWar Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsharshithaОценок пока нет
- Begining Tutorial To Eagle PCB Schematic Editor by Azhar JaffarДокумент21 страницаBegining Tutorial To Eagle PCB Schematic Editor by Azhar JaffarNazrul Ahmad KhalidОценок пока нет
- Gyro Camera For Motorcycle Using ArduinoДокумент8 страницGyro Camera For Motorcycle Using ArduinoCUIDAITOОценок пока нет
- Ampli - Hobby - Power 400 Watts Hi Fi High End Audio Power AmplifierДокумент7 страницAmpli - Hobby - Power 400 Watts Hi Fi High End Audio Power AmplifiersportredОценок пока нет
- Samsung R518 - BONN-E - BONN-C BA41-01060 - REV 1.0 PDFДокумент67 страницSamsung R518 - BONN-E - BONN-C BA41-01060 - REV 1.0 PDFnorbertoОценок пока нет
- Nokia 206 Dual SIM RM-872 RM873 Schematics v1.0Документ7 страницNokia 206 Dual SIM RM-872 RM873 Schematics v1.0Noureddine Takoucht33% (3)
- Osd Oscilloscope SchematicДокумент1 страницаOsd Oscilloscope SchematicSebastian Costa100% (1)
- LTC4416-1 Flyback Controller BoardДокумент1 страницаLTC4416-1 Flyback Controller BoardChandrasegar SubramaniОценок пока нет
- Adafruit - Feather m0 Wifi Atwinc1500Документ67 страницAdafruit - Feather m0 Wifi Atwinc1500Bobby100% (1)
- Astrolumina QHY5L User ManualДокумент18 страницAstrolumina QHY5L User ManualRatnesh100% (1)
- I8093w API Reference Manual v1.0.1Документ56 страницI8093w API Reference Manual v1.0.1Pedro BortotОценок пока нет
- Tutorial - GPS To Google EarthДокумент18 страницTutorial - GPS To Google EarthRaid ParisacaОценок пока нет
- Atmega 164pa PDFДокумент468 страницAtmega 164pa PDFPabloDavidTMОценок пока нет
- We Are Hiring Supervisor PDFДокумент2 страницыWe Are Hiring Supervisor PDFwahyu perdanaОценок пока нет
- NDS - Dilution Conversion Chart PDFДокумент1 страницаNDS - Dilution Conversion Chart PDFwahyu perdanaОценок пока нет
- Skripsi Tanpa Bab Pembahasan PDFДокумент110 страницSkripsi Tanpa Bab Pembahasan PDFwahyu perdanaОценок пока нет
- New Doc 2018-06-23 PDFДокумент3 страницыNew Doc 2018-06-23 PDFwahyu perdanaОценок пока нет
- Wiring The E18-D80nk Infrared Distance Ranging SensorДокумент2 страницыWiring The E18-D80nk Infrared Distance Ranging Sensorwahyu perdanaОценок пока нет
- Accurate Tilt Measurement Tool for Miter Saw Using Complementary FilterДокумент1 страницаAccurate Tilt Measurement Tool for Miter Saw Using Complementary Filterwahyu perdanaОценок пока нет
- VLOOKUP OdsДокумент1 страницаVLOOKUP Odswahyu perdanaОценок пока нет
- Dilution Conversions: PercentageДокумент1 страницаDilution Conversions: Percentagewahyu perdanaОценок пока нет
- Skripsi Tanpa Bab Pembahasan PDFДокумент110 страницSkripsi Tanpa Bab Pembahasan PDFwahyu perdanaОценок пока нет
- How To Install Arduino LibrariesДокумент1 страницаHow To Install Arduino Librarieswahyu perdanaОценок пока нет
- Lion Air Eticket Itinerary / Receipt: Wirata/Gusiketut MRДокумент1 страницаLion Air Eticket Itinerary / Receipt: Wirata/Gusiketut MRwahyu perdanaОценок пока нет
- A Complementary Filter For Attitude Estimation of A Fixed-Wing UAVДокумент6 страницA Complementary Filter For Attitude Estimation of A Fixed-Wing UAVzochОценок пока нет
- SensorsДокумент31 страницаSensorswahyu perdanaОценок пока нет
- 2nd Order Comp Filter SimulationДокумент3 страницы2nd Order Comp Filter Simulationthap_dinhОценок пока нет
- PH Probe For The PIC Temperature ControllerДокумент6 страницPH Probe For The PIC Temperature ControllerMohamad ZikriОценок пока нет
- PIC Temperature Controller PH Probe AmplifierДокумент6 страницPIC Temperature Controller PH Probe Amplifierwahyu perdanaОценок пока нет
- IMU Wk8Документ30 страницIMU Wk8Anh Là BiОценок пока нет
- Adafruit Ina219 Current Sensor BreakoutДокумент16 страницAdafruit Ina219 Current Sensor BreakoutMohamedHassanОценок пока нет
- Kuliah 11 Project Procurement ManagementДокумент17 страницKuliah 11 Project Procurement Managementwahyu perdanaОценок пока нет
- GB Circular Saw ID Gergaji Lingkaran VI Maùy Cöa Ñóa TH: Instruction ManualДокумент24 страницыGB Circular Saw ID Gergaji Lingkaran VI Maùy Cöa Ñóa TH: Instruction Manualwahyu perdanaОценок пока нет
- 12 VVV GoodДокумент12 страниц12 VVV GoodDrparul KhannaОценок пока нет
- Project Case ManagementДокумент7 страницProject Case Managementwahyu perdanaОценок пока нет
- IPSF Submission Process Online 2018-19 PDFДокумент69 страницIPSF Submission Process Online 2018-19 PDFChanakya GorlaОценок пока нет
- USB Driver Installation Manual ENG 2205-EДокумент8 страницUSB Driver Installation Manual ENG 2205-Ejuan pelotasОценок пока нет
- Assignment3 PalindromeStacksAndQueuesДокумент7 страницAssignment3 PalindromeStacksAndQueuesgab gabОценок пока нет
- Tutorial Letter 104/2/2021: Interactive ProgrammingДокумент11 страницTutorial Letter 104/2/2021: Interactive ProgrammingHendrick T HlungwaniОценок пока нет
- DidiSoft OpenPGP Library For Java Version 2.5Документ28 страницDidiSoft OpenPGP Library For Java Version 2.5hazapataОценок пока нет
- Create A Random Text Files - OnlinДокумент14 страницCreate A Random Text Files - OnlinUUОценок пока нет
- 900-0179 Rev TДокумент68 страниц900-0179 Rev TrijuvanaeroОценок пока нет
- Red Hat AMQ 7.2: Getting Started With AMQ BrokerДокумент34 страницыRed Hat AMQ 7.2: Getting Started With AMQ Brokersomanath padhyОценок пока нет
- Huawei Software Upgrade GuideДокумент6 страницHuawei Software Upgrade GuideEstudio JurídicoОценок пока нет
- XML Publisher - Multi-Level Report Template - ExampleДокумент12 страницXML Publisher - Multi-Level Report Template - Exampleluk1995Оценок пока нет
- SMAN460/440 - SMAN360 - JL2 Firmware Update Instructions For Website and Update DocsДокумент7 страницSMAN460/440 - SMAN360 - JL2 Firmware Update Instructions For Website and Update DocsbladeMatiasОценок пока нет
- FileList and GameGuard FilesДокумент24 страницыFileList and GameGuard FilesfelipinhufbОценок пока нет
- Amazon Marketplace Web Service: Getting Started Guide (API Version 2009-01-01)Документ24 страницыAmazon Marketplace Web Service: Getting Started Guide (API Version 2009-01-01)Rizwan AhmedОценок пока нет
- Qgisred: User'S ManualДокумент43 страницыQgisred: User'S ManualKasuni Liyanage100% (1)
- Installing Procreate BrushesДокумент2 страницыInstalling Procreate BrushesnokolОценок пока нет
- Backup & Restore of The Versiondog Server Archive: © Auvesy GMBHДокумент20 страницBackup & Restore of The Versiondog Server Archive: © Auvesy GMBHTrần Nhật VươngОценок пока нет
- Namd-Qm/Mm Tutorial: Unix/Macosx VersionДокумент17 страницNamd-Qm/Mm Tutorial: Unix/Macosx VersionCamila FigueredoОценок пока нет
- QEMU Manager - Computer On A StickДокумент39 страницQEMU Manager - Computer On A StickSean BellОценок пока нет
- Power System Load Flow Analysis Using Microsoft Excel Version 2 PDFДокумент20 страницPower System Load Flow Analysis Using Microsoft Excel Version 2 PDFDerrick RamosОценок пока нет
- XPI Inspector Troubleshooting GuideДокумент17 страницXPI Inspector Troubleshooting GuideLuis SousaОценок пока нет
- Getting Started Guide: Ultra Mapper Device Software Setup & DocumentationДокумент5 страницGetting Started Guide: Ultra Mapper Device Software Setup & Documentationfirebolt_7Оценок пока нет
- PSFT Extraction Toolkit For HDL White PaperДокумент45 страницPSFT Extraction Toolkit For HDL White PaperRajОценок пока нет
- Talend Subramanyam B Feb 2022Документ283 страницыTalend Subramanyam B Feb 2022Anonymous xMYE0TiNBcОценок пока нет