Вам также может понравиться
- Notice NT 06062018-1528285574Документ14 страницNotice NT 06062018-1528285574Braj Mohan MathurОценок пока нет
- Recruitment 20122017195923Документ208 страницRecruitment 20122017195923Braj Mohan MathurОценок пока нет
- JE Mechanical P2 2014 Watermark - PDF 87Документ6 страницJE Mechanical P2 2014 Watermark - PDF 87Braj Mohan MathurОценок пока нет
- Engl IFS 2017 PDFДокумент38 страницEngl IFS 2017 PDFNeelakanta YОценок пока нет
- DMRC ME P2 2016 Watermark - PDF 98Документ6 страницDMRC ME P2 2016 Watermark - PDF 98Braj Mohan MathurОценок пока нет
- Finance ProjectДокумент83 страницыFinance ProjectSandeep71% (42)
- DMRC ME P1 2016 Watermark - PDF 47Документ10 страницDMRC ME P1 2016 Watermark - PDF 47Braj Mohan MathurОценок пока нет
- JE Mechanical P2 2014 Watermark - PDF 87Документ6 страницJE Mechanical P2 2014 Watermark - PDF 87Braj Mohan MathurОценок пока нет
- SSC Cpo Mock Test - 3: (Solution)Документ12 страницSSC Cpo Mock Test - 3: (Solution)Braj Mohan MathurОценок пока нет
- Concrete from Grey to Green: Gammon's Sustainable SolutionsДокумент12 страницConcrete from Grey to Green: Gammon's Sustainable SolutionsOmar Marghani SalmaОценок пока нет
- HoneyДокумент28 страницHoneyBraj Mohan MathurОценок пока нет
- Notification CRPF Manager Staff PostsДокумент1 страницаNotification CRPF Manager Staff PostsBraj Mohan MathurОценок пока нет
- 13 Eskme 403Документ13 страниц13 Eskme 403Braj Mohan MathurОценок пока нет
- 13 Eskme 403Документ13 страниц13 Eskme 403Braj Mohan MathurОценок пока нет
- Him EnderДокумент2 страницыHim EnderBraj Mohan MathurОценок пока нет
- Himanshu Kumar: 163/44, Plot No-35A, Dhola Bhata, Ajmer (Raj.)Документ1 страницаHimanshu Kumar: 163/44, Plot No-35A, Dhola Bhata, Ajmer (Raj.)Braj Mohan MathurОценок пока нет
- Him EnderДокумент2 страницыHim EnderBraj Mohan MathurОценок пока нет
- Turbo charger: A brief history and overviewДокумент22 страницыTurbo charger: A brief history and overviewPragyan Kumar0% (1)
- Rajasthan Pre Engineering Test - 2013: Board of Technical Education, Rajasthan, JodhpurДокумент13 страницRajasthan Pre Engineering Test - 2013: Board of Technical Education, Rajasthan, JodhpurBraj Mohan MathurОценок пока нет
- General Ability-1Документ48 страницGeneral Ability-1s_bhargavОценок пока нет
- Examtgt - Rajasthan.gov - in Documents Vigyapti TGT 2013Документ13 страницExamtgt - Rajasthan.gov - in Documents Vigyapti TGT 2013Braj Mohan MathurОценок пока нет
- General Ability PDFДокумент48 страницGeneral Ability PDFBraj Mohan MathurОценок пока нет
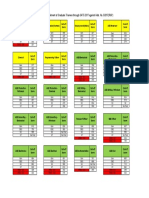
- Cut off Scores GATE 2017 Recruitment Graduate Trainees Advt 3/2017 R&PДокумент1 страницаCut off Scores GATE 2017 Recruitment Graduate Trainees Advt 3/2017 R&PBraj Mohan MathurОценок пока нет
- Manish SainiДокумент47 страницManish SainiBraj Mohan MathurОценок пока нет
- Form Cast PDFДокумент2 страницыForm Cast PDFBraj Mohan MathurОценок пока нет
- CAPF Assistant Commandants Exam 2017Документ14 страницCAPF Assistant Commandants Exam 2017Braj Mohan MathurОценок пока нет
- Resums of GateДокумент2 страницыResums of GateBraj Mohan MathurОценок пока нет
- Advertisement PDFДокумент1 страницаAdvertisement PDFBraj Mohan MathurОценок пока нет
- Marketing ProjectДокумент34 страницыMarketing ProjectBraj Mohan MathurОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Extrajudicial Settlement of Estate Rule 74, Section 1 ChecklistДокумент8 страницExtrajudicial Settlement of Estate Rule 74, Section 1 ChecklistMsyang Ann Corbo DiazОценок пока нет
- MA1201 Calculus and Basic Linear Algebra II Solution of Problem Set 4Документ10 страницMA1201 Calculus and Basic Linear Algebra II Solution of Problem Set 4Sit LucasОценок пока нет
- Joining Instruction 4 Years 22 23Документ11 страницJoining Instruction 4 Years 22 23Salmini ShamteОценок пока нет
- Real Estate Broker ReviewerREBLEXДокумент124 страницыReal Estate Broker ReviewerREBLEXMar100% (4)
- HSSC English Model PaperДокумент32 страницыHSSC English Model PaperMaryam Abdus SalamОценок пока нет
- LEARNING ACTIVITY Sheet Math 7 q3 M 1Документ4 страницыLEARNING ACTIVITY Sheet Math 7 q3 M 1Mariel PastoleroОценок пока нет
- Technical Specification of Heat Pumps ElectroluxДокумент9 страницTechnical Specification of Heat Pumps ElectroluxAnonymous LDJnXeОценок пока нет
- Emergency Management of AnaphylaxisДокумент1 страницаEmergency Management of AnaphylaxisEugene SandhuОценок пока нет
- NABARD road inspection report formatДокумент24 страницыNABARD road inspection report formatSrinivas PОценок пока нет
- Basic Features of The Microcredit Regulatory Authority Act, 2006Документ10 страницBasic Features of The Microcredit Regulatory Authority Act, 2006Asif Hasan DhimanОценок пока нет
- Technical specifications for JR3 multi-axis force-torque sensor modelsДокумент1 страницаTechnical specifications for JR3 multi-axis force-torque sensor modelsSAN JUAN BAUTISTAОценок пока нет
- Methods to estimate stakeholder views of sustainabilityДокумент7 страницMethods to estimate stakeholder views of sustainabilityAlireza FatemiОценок пока нет
- Ailunce HD1 Software ManualДокумент33 страницыAilunce HD1 Software ManualMarc LaBarberaОценок пока нет
- Iphoneos 31Документ159 страницIphoneos 31Ivan VeBoОценок пока нет
- EA Linear RegressionДокумент3 страницыEA Linear RegressionJosh RamosОценок пока нет
- Developing the cycle of maslahah based performance management system implementationДокумент27 страницDeveloping the cycle of maslahah based performance management system implementationM Audito AlfansyahОценок пока нет
- ISO 13485-2016 - DR - Pack - Control of Non Conforming ProductsДокумент4 страницыISO 13485-2016 - DR - Pack - Control of Non Conforming ProductskmasanОценок пока нет
- Problem Set SolutionsДокумент16 страницProblem Set SolutionsKunal SharmaОценок пока нет
- Managerial EconomicsДокумент3 страницыManagerial EconomicsGuruKPOОценок пока нет
- Ofper 1 Application For Seagoing AppointmentДокумент4 страницыOfper 1 Application For Seagoing AppointmentNarayana ReddyОценок пока нет
- SDS OU1060 IPeptideДокумент6 страницSDS OU1060 IPeptideSaowalak PhonseeОценок пока нет
- Ultra Slimpak G448-0002: Bridge Input Field Configurable IsolatorДокумент4 страницыUltra Slimpak G448-0002: Bridge Input Field Configurable IsolatorVladimirОценок пока нет
- UD150L-40E Ope M501-E053GДокумент164 страницыUD150L-40E Ope M501-E053GMahmoud Mady100% (3)
- Individual Performance Commitment and Review Form (Ipcrf) : Mfos Kras Objectives Timeline Weight Per KRAДокумент4 страницыIndividual Performance Commitment and Review Form (Ipcrf) : Mfos Kras Objectives Timeline Weight Per KRAChris21JinkyОценок пока нет
- Damcos Mas2600 Installation UsermanualДокумент26 страницDamcos Mas2600 Installation Usermanualair1111Оценок пока нет
- LSMW With Rfbibl00Документ14 страницLSMW With Rfbibl00abbasx0% (1)
- Typical T Intersection On Rural Local Road With Left Turn LanesДокумент1 страницаTypical T Intersection On Rural Local Road With Left Turn Lanesahmed.almakawyОценок пока нет
- Trillium Seismometer: User GuideДокумент34 страницыTrillium Seismometer: User GuideDjibril Idé AlphaОценок пока нет
- Tutorial 1 Discussion Document - Batch 03Документ4 страницыTutorial 1 Discussion Document - Batch 03Anindya CostaОценок пока нет
- Correlation Degree Serpentinization of Source Rock To Laterite Nickel Value The Saprolite Zone in PB 5, Konawe Regency, Southeast SulawesiДокумент8 страницCorrelation Degree Serpentinization of Source Rock To Laterite Nickel Value The Saprolite Zone in PB 5, Konawe Regency, Southeast SulawesimuqfiОценок пока нет