Академический Документы
Профессиональный Документы
Культура Документы
Laboratorio 2 de Mecánica Newtoniana
Загружено:
KevinGuerreroАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Laboratorio 2 de Mecánica Newtoniana
Загружено:
KevinGuerreroАвторское право:
Доступные форматы
Laboratorio 2 de Mecnica Newtoniana Formatted: Font: Bodoni MT Black, 12 pt
Informe Formatted: Centered
Suma de Fuerzas
Kevin Guerrero Formatted: Font: (Default) Aharoni, 10 pt
06 de noviembre30 de octubre del 2015 Formatted: Justified
Formatted: Font: (Default) Aharoni, 10 pt
Resumen Formatted: Font: (Default) Aharoni, 10 pt
Se realiza un experimento que tiene como base las fuerzas que actan sobre un sistema en
equilibrio las cuales son medidas mediante dinammetros. Se prepara un sistema que en
cuestin mantenga un peso en el aire mediante tenciones, cambiando el ngulo de las tenciones
primero con igual ngulo entre ellas y variando estos simultneamente partiendo desde 20 y
subiendo cada vez 10 hasta llegar a 50 se va tomando las medidas de las fuerzas que se sienten
en el sedal con los dinammetros; despus se empieza variar solo uno de los dos ngulos de
aqu se toma as mismo las fuerzas y el ngulo restante.
1. Objetivos generales Formatted: Heading 1, Justified, Numbered + Level: 1
+ Numbering Style: 1, 2, 3, + Start at: 1 + Alignment:
Determinar experimentalmente la resultante de la suma de varios vectores de fuerza. Left + Aligned at: 0.25" + Indent at: 0.5"
1. Relacionar los vectores de fuerza experimentales con su respectiva grfica, y determinar
Formatted: Justified, Bulleted + Level: 1 + Aligned at:
su resultante por el mtodo grfico.
0.25" + Indent at: 0.5"
2. Introduccin Formatted: Heading 1, Justified, Numbered + Level: 1
+ Numbering Style: 1, 2, 3, + Start at: 1 + Alignment:
La fuerza es una magnitud vectorial; el trmino vectorial quiere decir que la fuerza tiene una Left + Aligned at: 0.25" + Indent at: 0.5"
magnitud y una direccin; la unidad que la representa es el newton el cual segn su anlisis
Formatted: Justified, No bullets or numbering
dimensional hace referencia a la masa por un factor de aceleracin siendo la masa una magnitud
escalar y la aceleracin una magnitud vectorial, a su vez la aceleracin es el cambio de velocidad
en una unidad de tiempo y por ltimo la velocidad relaciona el cambio de posicin en unida de
tiempo quedando los nwtones de finidos por [masa * metros * segundos-2]; en nuestra vida
cotidiana nos encontramos en presencia de un sin nmero de fuerzas que quizs por ya estar
acostumbrados a estas no las podamos ver as un ejemplo muy claro de estas es la fuerza de la
gravedad la cual atrae a los cuerpos al centro del planeta. Todas y cada una de esas fuerzas se
pueden expresar mediante vectores, cuya interpretacin grfica se la da en flechas que se
adaptan segn los datos presentes en los vectores, as como su magnitud la cual representa su
longitud.
En el presente trabajo como objetivo secundario se pretende conseguir una comprensin
optima de un sistema en equilibrio, referenciando a la primera ley de Newton la cual establece
que un sistema en equilibrio permanecer en ese estado siempre y cuando las fuerzas
resultantes externas que se aplican sobre el sistema den una resultante de cero, as mismo si un
cuerpo est en movimiento contante permanecer en este estado si se cumple la condicin
antes propuesta; se puede desprender dos tipos de equilibrios los cuales son uno de traslacin
y otro de rotacin para el primero la sumatoria de fuerzas debe ser cero y para el segundo la
sumatoria de torque debe ser igual a cero; para el presente trabajo se considerara
especialmente la primera condicin de la sumatoria de fuerzas.[1] Formatted: Superscript
2. Formatted: Heading 1, Justified, Numbered + Level: 1
+ Numbering Style: 1, 2, 3, + Start at: 1 + Alignment:
Left + Aligned at: 0.25" + Indent at: 0.5"
3. Materiales y experimentacin
Pie estativo 2 Formatted: Justified, No bullets or numbering
Varilla soporte, 600[mm] 3
Nuez doble 2
Platillo para pesas de ranura, 10[g] 1
Pesa de ranura, 10[g] 4
Pesa de ranura, 50[g] 1
Dinammetro 1[N] 1
Dinammetro 2[N] 1
Soporte para dinammetros 2
Disco Graduado 1
Tijeras 1
Sedal 1
Cinta mtrica, 2[m] 1
Cinta adhesiva 1
Para la experimentacin se procedi de la siguiente manera:
1. Se colocaron en los pies estativos una varilla en cada uno verticalmente.
2. Horizontalmente se coloc otra varilla entre los pies estativos.
3. En las varillas verticales se puso una nuez doble respectivamente.
4. Luego se procedi a poner los dinammetros en las nueces dobles, previamente se
enceraron los dinammetros.
5. Con el sedal se juntaron los extremos inferiores de los dinammetros dejando un
espacio entre ellos.
6. En el sedal se coloc el porta pesas y posteriormente el peso.
7. Se calibro los ngulos iguales moviendo los pies estativos y los ngulos diferentes se los
calibro moviendo una delas nueces.
8. Se tom respectivamente las fuerzas despus de cada movimiento.
3.
4. Resultados y anlisis Formatted: Heading 1, Justified, Numbered + Level: 1
+ Numbering Style: 1, 2, 3, + Start at: 1 + Alignment:
4.1 Datos brutos Left + Aligned at: 0.25" + Indent at: 0.5"
1 [] 2 [] F1 [N] F2 [N] Formatted: Justified
20 20 0,5 0,52 Formatted: Justified
30 30 0,53 0,58
Formatted: Justified
40 40 0,6 0,62
Formatted: Justified
50 50 0,68 0,7
Tabla 1 Datos brutos de los ngulos iguales Formatted: Justified
Formatted: Justified, Keep with next
1 [] 2 [] F1 [N] F2 [N]
Formatted: Caption, Justified, No bullets or
40 34 0,58 0,63
Formatted: Justified
30 43 0,63 0,71
Formatted: Justified
70 31 0,49 0,77
90 23 0,43 1,16 Formatted: Justified
105 21 0,46 1,32 Formatted: Justified
Tabla 2 Datos con la variacin de un solo ngulo Formatted: Justified
Formatted: Justified
Formatted: Justified, Keep with next
Formatted: Caption, Justified, No bullets or
4.2 Suma grfica ngulos iguales
Ilustracin 1 Suma de fuerzas grafica en Geo Gebra ngulos de 20, 30, 40 y 50 iguales.
4.2.1 Suma analtica de vectores
Sea |V|= X y tiene un ngulo con el eje x positivo el vector se define V= |V|cos (x) +|V|sen
(y).
Para el ngulo de 20:
F1= 0.50 cos (70) (x) + 0.50 sin (70) (y) [N]
+ F2= -0.52 cos (110) (x) + 0.52 sin (110) (y) [N]
R -0.00684 (x) + 0.96 (y) [N]; |R|= 0.96 [N], = 90.41
Se repite el proceso para cada uno de los angulos opteniendo:
Con 30: R -0.025 (x) + 0.96 (y) [N]; |R|= 0.96 [N], = 91.49
Con 40: R -0.013 (x) + 0.94 (y) [N]; |R|= 0.94 [N], = 90.79
Con 50: R 0.015 (x) + 0.89 (y) [N]; |R|= 0.88 [N], = 89.03
4.2.2 Tabla de resultante de ngulos iguales
Formatted Table
1 [] 2 [] |R| Grfico [N] |R| Analtico [N]
Formatted: Justified
20 20 0,96 0,96
Formatted: Justified
30 30 0,96 0,96
40 40 0,93 0,94 Formatted: Justified
50 50 0,89 0,88 Formatted: Justified
Formatted: Normal, Justified
4.3 Suma grfica de fuerzas con la variacin de un solo ngulo
Ilustracin 2 Suma de fuerzas grafica en Geo Gebra variando un solo ngulo en razones de 40, 50, 70, 90 y 105.
4.3.1 Suma analtica de vectores
Con el mismo procedimiento de la seccion 4.2.1 se obtiene:
Con 40 , y el otro se midio 34: R 0.020 (x) + 0.97 (y) [N]; |R|= 0.97 [N], = 88.81
Con 50 , y el otro se midio 43: R -0.0016 (x) + 0.92 (y) [N]; |R|= 0.92 [N], = 90.102
Con 70 , y el otro se midio 31: R -0.039 (x) + 0.999 (y) [N]; |R|= 0.999 [N], = 92.24
Con 90 , y el otro se midio 23: R -0.0232 (x) + 1.07 (y) [N]; |R|= 1.07 [N], = 91.25
Con 105 , y el otro se midio 21: R -0.0287 (x) + 1.11 (y) [N]; |R|= 1.11 [N], = 91.48
4.3.2 Tabla de resultante de ngulos distintos
1 [] 2 [] |R| Grfico [N] |R| Analtico [N] Formatted Table
40 34 0,97 0,97 Formatted: Justified
30 43 0,92 0,92
Formatted: Justified
70 31 1,00 0.99
Formatted: Justified
90 23 1,07 1,07
Formatted: Justified
105 21 1,11 1,11
Formatted: Justified
4.4 Tabla comparacion de datos
Por equivalencia 100 [g] = 0.1 [kg] = 0.98 [N] peso del porta pesas.
Error relativo Error relativo
1 [] 2 [] |Rg| Grfico [N] |Ra| Analtico [N] W portapesas [N] W-Ra W-Rg
20 20 0,96 0,96 0,98 -0,02 -0,02 0,02 0,020
30 30 0,96 0,96 -0,02 -0,02 0,02 0,020
40 40 0,93 0,94 -0,04 -0,05 0,04 0,051
50 50 0,89 0,88 -0,1 -0,09 0,10 0,092
40 34 0,97 0,97 -0,01 -0,01 0,01 0,010
30 43 0,92 0,92 -0,06 -0,06 0,06 0,061
70 31 1,00 1,00 0,02 0,02 0,02 0,020
90 23 1,07 1,07 0,09 0,09 0,09 0,092
105 21 1,11 1,11 0,13 0,13 0,13 0,133
Tabla 3 Calculo del error absoluto en tanto a las resultantes en comparacin con el peso del porta pesas.
Error relativo Error relativo
1 [] 2 [] g Grfico [] a Analtico [] r portapesas [] r-a r-g
20 20 90,41 90,41 90 0,41 0,41 0,00 0,00
30 30 91,49 91,49 1,49 1,49 0,02 0,02
40 40 90,79 90,79 0,79 0,79 0,01 0,01
50 50 89,01 89,03 -0,97 -0,99 0,01 0,01
40 34 88,78 88,81 -1,19 -1,22 0,01 0,01
30 43 90,10 90,10 0,1 0,1 0,00 0,00
70 31 92,24 92,24 2,24 2,24 0,02 0,02
90 23 91,25 91,25 1,25 1,25 0,01 0,01
105 21 91,48 91,48 1,48 1,48 0,02 0,02
Tabla 4 Calculo del error absoluto en tanto a los ngulos en comparacin con el ngulo del porta pesas.
4.4.1 Justificacin
La medicin se pudo ver afectada de varias formas pero la que ms creo que ocasion el
aumento de los errores relativos detallados en las tablas 3 y 4 fue en la lectura de los datos por
los observadores, as mismo al momento de colocar los ngulos, todo esto pudo incurrir en los
errores absolutos anteriores.
4.5 Clculo de las fuerzas tericas
Para esto se proceder vectorialmente tomando el punto donde todas las fuerzas actan como
nuestro centro para un diagrama de cuerpo libre, despus se establecen las condiciones de
equilibrio y se obtienen las fuerzas.
Sea W y V las fuerzas respectivamente, alpha y beta sus
angulos, u (0.98) el portapesas.
1.- Establecemos las condiciones de equlibrio de
fuerzas
= 0 , = 0
2.Establecemos las ecuaciones
Fx= Vcos()-Wcos(); entonces Vcos() = Wcos()
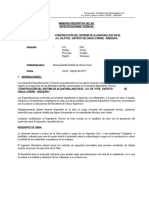
Ilustracin 3 DCL General para el sistema que Fy= -u+ Vsen()+Wsen(); entonces Vsen()+Wsen()=u Formatted: Caption
estamos tratando
A partir de las ecuaciones anteriores se puede obtener
todos los resultados teoricos de equivalencia para las fuerzas actuentes en el sistema de
experimentacion; se obtiene la siguiente tabla.
Angulos Fuerzas experimentales (F,E)Fuerzas teoricas (F.T) Fuerzas 1 Fuerzas 2 Error relativo F1 Error relativo F2
1 [] 2 [] F1 [N] F2 [N] F1 [N] F2 [N] (FE1-FT1) (FE2-FT2)
20 20 0,50 0,52 0,52 0,52 -0,02 0 0,04 0,00
30 30 0,53 0,58 0,57 0,57 -0,04 0,01 0,07 0,02
40 40 0,60 0,62 0,64 0,64 -0,04 -0,02 0,06 0,03
50 50 0,68 0,7 0,76 0,76 -0,08 -0,06 0,11 0,08
40 34 0,58 0,63 0,66 0,57 -0,08 0,06 0,12 0,11
50 43 0,63 0,71 0,67 0,75 -0,04 -0,04 0,06 0,05
70 31 0,49 0,77 0,51 0,94 -0,02 -0,17 0,04 0,18
90 23 0,43 1,16 0,41 1,06 0,02 0,1 0,05 0,09
105 21 0,46 1,32 0,43 1,17 0,03 0,15 0,07 0,13
Angulos Fuerzas exerimentales (F,E) Fuerzas teoricas (F.T) Fuerzas 1 Fuerzas 2 Error relativo F1 Error relativo F2
1 [] 2 [] F1 [N] F2 [N] F1 [N] F2 [N] (FE1-FT1) (FE2-FT2)
20 20 0,50 0,52 0,52 0,52 -0,02 0 0,04 0,00
30 30 0,53 0,58 0,57 0,57 -0,05 0,01 0,09 0,02
40 40 0,60 0,62 0,64 0,64 -0,02 -0,02 0,03 0,03
50 50 0,68 0,7 0,76 0,76 -0,02 -0,06 0,03 0,08
40 34 0,58 0,63 0,66 0,57 -0,05 0,06 0,08 0,11
50 43 0,63 0,71 0,67 0,75 -0,08 -0,04 0,12 0,05
70 31 0,49 0,77 0,51 0,94 -0,28 -0,17 0,55 0,18
90 23 0,43 1,16 0,41 1,06 -0,73 0,1 1,78 0,09
105 21 0,46 1,32 0,43 1,17 -0,86 0,15 2,00 0,13
4. Tabla 5 Error relativo fuerzas tericas vs experimentales
5. ConclusioConclusin nes Formatted: Heading 1, Justified, Numbered + Level: 1
+ Numbering Style: 1, 2, 3, + Start at: 1 + Alignment:
Al existir la presencia de decimales en los datos tomados en la prctica se puede inferir que va Left + Aligned at: 0.25" + Indent at: 0.5"
a existir cierta incertidumbre en el resultado, esta y cualquier falla del observador en tanto al
momento de tomar los resultados visuales se pudo incrementar un tanto no muy significativo
el error en el anlisis de datos donde se sum los vectores fuerza obtenidos en la prctica de la
manera grfica y de la manera analtica, despus se procedi a obtener unas fuerzas tericas
las cuales son las que deberan tener las fuerzas experimentales y se realiz una comparacin
entre estas lo que se puede apreciar en la tabla cinco; entonces se obtuvo un error relativo
mximo de 0.12 lo cual no representa mucho; al hacer una comparacin con el principio de la
primera ley de newton la aproximacin que obtuvimos si cumple con lo descrito para que un
sistema est en equilibrio.
5.
6. Referencias Formatted: Heading 1, Justified, Numbered + Level: 1
+ Numbering Style: 1, 2, 3, + Start at: 1 + Alignment:
1.Escuela Politcnica Nacional . (2015). Laboratorio de Mecanica Newtoniana (Guia del Left + Aligned at: 0.25" + Indent at: 0.5"
estudiante). Quito: Unidad de Publicaciones de la Facultad de Ciencias .
6.
Вам также может понравиться
- Espectrofotómetro InfrarrojoДокумент21 страницаEspectrofotómetro InfrarrojoGiselle SanchezОценок пока нет
- Practica 2 - Cortante en Remaches - VER - 9Документ4 страницыPractica 2 - Cortante en Remaches - VER - 9VALENTINA JARAMILLO HERNANDEZОценок пока нет
- Análisis de Fourier Y Ecuaciones en Derivadas ParcialesДокумент6 страницAnálisis de Fourier Y Ecuaciones en Derivadas ParcialesRicardo LopezОценок пока нет
- Manual Senalizacion Vial Gobierno de JaliscoДокумент52 страницыManual Senalizacion Vial Gobierno de JaliscoJoan CortésОценок пока нет
- La Celula VegetalДокумент7 страницLa Celula VegetalJULIO CESAR SOSA CHOQUEОценок пока нет
- Practica 1 YodoformoДокумент6 страницPractica 1 Yodoformomelvin moralesОценок пока нет
- GUIA DE PROBLEMAS - Termodinamica 1era Parte PDFДокумент4 страницыGUIA DE PROBLEMAS - Termodinamica 1era Parte PDFpedrojrs100% (1)
- Tipos de Procesos Termodinámicos en La AgroindustriaДокумент20 страницTipos de Procesos Termodinámicos en La AgroindustriaVictor Hugo SepulvedaОценок пока нет
- Triptico Algebbra LinealДокумент2 страницыTriptico Algebbra LinealjackОценок пока нет
- Physics Paper 3 SL SpanishДокумент28 страницPhysics Paper 3 SL SpanishNico RamaОценок пока нет
- Ecuaciones DiferencialesДокумент14 страницEcuaciones DiferencialesKimberly Sanchez Sanchez .Оценок пока нет
- Icad601 - s1 - Definicion - Matriz EconometriaДокумент4 страницыIcad601 - s1 - Definicion - Matriz EconometriaAlejandra JarpaОценок пока нет
- Mapa Conceptual La InvestigacionДокумент2 страницыMapa Conceptual La InvestigacionKenia AtenciaОценок пока нет
- CEAP 48 Aprendizaje y Estilos AtribucionalesДокумент34 страницыCEAP 48 Aprendizaje y Estilos Atribucionalesamaliakb100% (1)
- Tablero ElectricoДокумент10 страницTablero ElectricoMIGUEL ANGEL MARTINEZ ROJANOОценок пока нет
- FT BarrasДокумент8 страницFT BarrasEd GonzalesОценок пока нет
- TP2 - EnunciadoДокумент3 страницыTP2 - EnunciadoSistemasutnОценок пока нет
- Ciclos RankineДокумент6 страницCiclos RankineJaazania DiazОценок пока нет
- Equipo 4Документ25 страницEquipo 4Isel CastroОценок пока нет
- Barrantes ObjetivosДокумент7 страницBarrantes ObjetivosCarla EscobarОценок пока нет
- Especificaciones Tecnicas Alcantarillado PitisДокумент32 страницыEspecificaciones Tecnicas Alcantarillado Pitisgeotecnista2003Оценок пока нет
- Refuerzo CCNN 5º PrimariaДокумент4 страницыRefuerzo CCNN 5º PrimariaElAlkazar Birra50% (2)
- Avante Compact II SpanishДокумент1 страницаAvante Compact II SpanishNellyoneTVОценок пока нет
- Suma de Matrices en DevДокумент6 страницSuma de Matrices en DevjockevandeathОценок пока нет
- Establecimiento Del Alcance Del SistemaДокумент28 страницEstablecimiento Del Alcance Del SistemaElsy Z VargasОценок пока нет
- PrograДокумент36 страницPrograVibmec123Оценок пока нет
- Tarea - Juan Carlos Muñoz LealДокумент4 страницыTarea - Juan Carlos Muñoz LealYsla VargasОценок пока нет
- Qué Es La Tinción de Gram y Cómo HacerlaДокумент14 страницQué Es La Tinción de Gram y Cómo HacerlaYahsé Rojas ChallaОценок пока нет
- Instalar en 64bitsДокумент21 страницаInstalar en 64bitsjnyck17Оценок пока нет
- Paper 5Документ3 страницыPaper 5christian rodasОценок пока нет