Вам также может понравиться
- Defining Control Strategies For MicroGrids Islanded OperationДокумент9 страницDefining Control Strategies For MicroGrids Islanded OperationNaveen AmarasingheОценок пока нет
- Indranil Saaki Paper On Improved Control Strategy For Fuel Cell and Photo Voltaic InvertersДокумент5 страницIndranil Saaki Paper On Improved Control Strategy For Fuel Cell and Photo Voltaic InvertersIndra SakiОценок пока нет
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977От EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Оценок пока нет
- 1final Iete - Forth Revision1Документ10 страниц1final Iete - Forth Revision1Dr. Monika JainОценок пока нет
- 05 Smartgreens 2013 17 CRДокумент10 страниц05 Smartgreens 2013 17 CRIsmael MinchalaОценок пока нет
- Control of Power Converters For Microgrids: I. Vechiu, A. Llaria, O. Curea and H. CamblongДокумент6 страницControl of Power Converters For Microgrids: I. Vechiu, A. Llaria, O. Curea and H. Camblongmohd786azharОценок пока нет
- Microgrid Dynamic Performance Improvement Using A Doubly Fed Induction Wind GeneratorДокумент9 страницMicrogrid Dynamic Performance Improvement Using A Doubly Fed Induction Wind GeneratorDhinesh BaluОценок пока нет
- Ijeet 09 04 002 PDFДокумент15 страницIjeet 09 04 002 PDFveljal6317Оценок пока нет
- Microturbine FuzzyДокумент7 страницMicroturbine FuzzyTariq KhanОценок пока нет
- 021micro Turbine Coupled PV Cells Hybrid SystemДокумент10 страниц021micro Turbine Coupled PV Cells Hybrid SystemSurya Chandra MuppanasОценок пока нет
- Dynamic Modeling and Operation Strategy For A Microgrid With Wind and Photovoltaic ResourcesДокумент10 страницDynamic Modeling and Operation Strategy For A Microgrid With Wind and Photovoltaic ResourcesVishnuTej VinjamuriОценок пока нет
- Ijmer 46061528 PDFДокумент14 страницIjmer 46061528 PDFIJMERОценок пока нет
- Microgrids Black StartДокумент7 страницMicrogrids Black StartLalit ChoudharyОценок пока нет
- Fuzzy control of WT with DFIG for microgrid integrationДокумент25 страницFuzzy control of WT with DFIG for microgrid integrationAlberto ImperatoОценок пока нет
- Edas Final-1570034251Документ13 страницEdas Final-1570034251martinv564Оценок пока нет
- 2nd Control of Single-PhaseДокумент37 страниц2nd Control of Single-PhaseCaptain GamerОценок пока нет
- Modeling of Microturbine Based Distributed Generation SystemДокумент4 страницыModeling of Microturbine Based Distributed Generation SystemsaraswatthiОценок пока нет
- Fuz MPPT PumpДокумент10 страницFuz MPPT Pumpvintin4uОценок пока нет
- Solar - Photovoltaic - Generators - With - MPPT - and - BatterДокумент12 страницSolar - Photovoltaic - Generators - With - MPPT - and - BatterCB MildredОценок пока нет
- Dynamic Modeling and Simulation Analysis On Micro-Grid Based On DIgSILENTДокумент6 страницDynamic Modeling and Simulation Analysis On Micro-Grid Based On DIgSILENTjano_rdr100% (1)
- Control and Protection of Power Electronics Interfaced Distri-Buted Generation Systems in A Customer-Driven MicrogridДокумент8 страницControl and Protection of Power Electronics Interfaced Distri-Buted Generation Systems in A Customer-Driven MicrogridHedra GirgisОценок пока нет
- Analysis of The Impacts of Decentralized Production On Distribution GridsДокумент5 страницAnalysis of The Impacts of Decentralized Production On Distribution GridsIJAERS JOURNALОценок пока нет
- Control Strategy For Modular Multilevel Converter Applied To Active Power Injection and Reactive Power Compensation - Integration in PV MicrogridsДокумент11 страницControl Strategy For Modular Multilevel Converter Applied To Active Power Injection and Reactive Power Compensation - Integration in PV MicrogridsGerardo OsmeОценок пока нет
- Energies: An MPC Approach For Grid-Forming Inverters: Theory and ExperimentДокумент17 страницEnergies: An MPC Approach For Grid-Forming Inverters: Theory and Experimentsalemg82Оценок пока нет
- 20-02-2020-1582202064-6-Ijeee-1. Ijeee-Simulating The Impact of Microgrid Generator Set Failures On Microgrid PerformancesДокумент8 страниц20-02-2020-1582202064-6-Ijeee-1. Ijeee-Simulating The Impact of Microgrid Generator Set Failures On Microgrid Performancesiaset123Оценок пока нет
- GalleyProof 1 (21M 12 699) GalleyProof Original ASTESJ 070204Документ21 страницаGalleyProof 1 (21M 12 699) GalleyProof Original ASTESJ 070204MoulayMoulyОценок пока нет
- Solid State Transformer (SST) : Daniel Garrido, Federico RodríguezДокумент6 страницSolid State Transformer (SST) : Daniel Garrido, Federico RodríguezFede RodríguezОценок пока нет
- Stat Com SimДокумент8 страницStat Com SimmakroumОценок пока нет
- Dynamic Model Microturbine: of Generation System For Grid Connected/Islanding OperationДокумент6 страницDynamic Model Microturbine: of Generation System For Grid Connected/Islanding OperationMahinder ChoudharyОценок пока нет
- Dynamic CompensationДокумент6 страницDynamic Compensationhiabhijit29Оценок пока нет
- 05IPST080Документ6 страниц05IPST080Niveditha NamasivaayamОценок пока нет
- Modeling and Analysis Microturbine and Battery Storage System Microgrid System Based On Green EnergyДокумент6 страницModeling and Analysis Microturbine and Battery Storage System Microgrid System Based On Green EnergyTrần TúОценок пока нет
- A System of Systems Framework For MicrogridsДокумент40 страницA System of Systems Framework For MicrogridsSureshОценок пока нет
- Real-Time Analysis of The Control Structure and Management Functions of A Hybrid Microgrid SystemДокумент6 страницReal-Time Analysis of The Control Structure and Management Functions of A Hybrid Microgrid SystemJitender KaushalОценок пока нет
- International Journal of Advanced Research in Computer Science and Software EngineeringДокумент5 страницInternational Journal of Advanced Research in Computer Science and Software Engineeringdoud98Оценок пока нет
- Venkata Yaramasu, Student Member, IEEE, Bin Wu, Fellow, IEEE, Marco Rivera, Member, IEEE, and Jose Rodriguez, Fellow, IEEEДокумент11 страницVenkata Yaramasu, Student Member, IEEE, Bin Wu, Fellow, IEEE, Marco Rivera, Member, IEEE, and Jose Rodriguez, Fellow, IEEEchikha saidОценок пока нет
- Incremental Conductance MPPT Method For PV Systems-LibreДокумент3 страницыIncremental Conductance MPPT Method For PV Systems-LibreRushikeshKatkarОценок пока нет
- Shi Gong 2011Документ6 страницShi Gong 2011salmanassriОценок пока нет
- Optimal FACTS Placement Toolbox Maximizes LoadabilityДокумент3 страницыOptimal FACTS Placement Toolbox Maximizes LoadabilityksbnОценок пока нет
- Small-Signal_Stability_of_Hybrid_Inverters_with_GrДокумент20 страницSmall-Signal_Stability_of_Hybrid_Inverters_with_GrAllal BOUZIDОценок пока нет
- Loss of Distributed Generation in Case of Fault in Distributing NetДокумент6 страницLoss of Distributed Generation in Case of Fault in Distributing NetmakroumОценок пока нет
- Energies 16 06188Документ33 страницыEnergies 16 06188LeonelAlejandroОценок пока нет
- Analysis, Design, and Implementation of The AFZ Converter Applied To Photovoltaic SystemsДокумент18 страницAnalysis, Design, and Implementation of The AFZ Converter Applied To Photovoltaic Systemsvijaya karthegha.RОценок пока нет
- Modelling and Design of PID Controller For Voltage Control of AC Hybrid Micro-GridДокумент9 страницModelling and Design of PID Controller For Voltage Control of AC Hybrid Micro-GridRevit Mep Khoa Đ-đtspktОценок пока нет
- STATCOM Based Power Quality Improvement in Hybrid Power SystemДокумент5 страницSTATCOM Based Power Quality Improvement in Hybrid Power System20bee084Оценок пока нет
- Voltage Regulation in Hybrid Solar and Wind Energy System Using Sepic ConverterДокумент8 страницVoltage Regulation in Hybrid Solar and Wind Energy System Using Sepic ConverterdineshkumarОценок пока нет
- Research PaperДокумент8 страницResearch PaperkingОценок пока нет
- A Control Strategy For Implementation of Enhanced Voltage Quality in Micro GridДокумент7 страницA Control Strategy For Implementation of Enhanced Voltage Quality in Micro GriderpublicationОценок пока нет
- 2021 Chilecon Pinv15-584Документ5 страниц2021 Chilecon Pinv15-584EdgarОценок пока нет
- Review of Three-Phase Inverters Control For Unbalanced Load CompensationДокумент14 страницReview of Three-Phase Inverters Control For Unbalanced Load CompensationIAES IJPEDSОценок пока нет
- Analysis and Implementation of An Improved FlybackДокумент17 страницAnalysis and Implementation of An Improved FlybackReddyKvmОценок пока нет
- Energies: Implementation of IEC 61400-27-1 Type 3 Model: Performance Analysis Under Different Modeling ApproachesДокумент23 страницыEnergies: Implementation of IEC 61400-27-1 Type 3 Model: Performance Analysis Under Different Modeling ApproachesLuis FebresОценок пока нет
- Micro GridДокумент5 страницMicro GridArif IbrahimОценок пока нет
- Optimal Power Quality Control of Micro-Grid InvertersДокумент11 страницOptimal Power Quality Control of Micro-Grid Inverterssk.karimeeeОценок пока нет
- Design and Simulation by Photovoltaic System With Tapped TopologyДокумент7 страницDesign and Simulation by Photovoltaic System With Tapped TopologySamir Fassi FassiОценок пока нет
- Dynamic Models of Wind Farms For Power System Studies - Status by IEA Wind R&D Annex 21Документ8 страницDynamic Models of Wind Farms For Power System Studies - Status by IEA Wind R&D Annex 21ajitborseОценок пока нет
- Economic Power Dispatch of Distributed Generators in a Grid-Connected MicrogridДокумент8 страницEconomic Power Dispatch of Distributed Generators in a Grid-Connected MicrogridAlamson SitanggangОценок пока нет
- Maulana Abul Kalam Azad University of Technology, West Bengal Syllabus For B. Tech in Electrical EngineeringДокумент29 страницMaulana Abul Kalam Azad University of Technology, West Bengal Syllabus For B. Tech in Electrical Engineeringking kjОценок пока нет
- EE Syllabus-18.6.19Документ19 страницEE Syllabus-18.6.19Saptarsi BanerjeeОценок пока нет
- Geothermal Energy: Types, Locations, UsesДокумент10 страницGeothermal Energy: Types, Locations, UsesDulal MannaОценок пока нет
- Sem 4 Electrical UEMassignmentДокумент30 страницSem 4 Electrical UEMassignmentDulal MannaОценок пока нет
- Furnace Modeling and Refrigerator SimulationДокумент8 страницFurnace Modeling and Refrigerator SimulationRazvan SasuОценок пока нет
- Advt Rectt Lecturer in Various Sub in Gov PolytechnicsДокумент5 страницAdvt Rectt Lecturer in Various Sub in Gov PolytechnicsPinaki MukherjeeОценок пока нет
- Guidelines PSCДокумент1 страницаGuidelines PSCDulal MannaОценок пока нет
- Srls (Smart Residential Load Simulator)Документ8 страницSrls (Smart Residential Load Simulator)Dulal MannaОценок пока нет
- Electrical Power and Energy Systems: Tine L. Vandoorn, Jeroen D.M. de Kooning, Bart Meersman, Brecht ZwaenepoelДокумент11 страницElectrical Power and Energy Systems: Tine L. Vandoorn, Jeroen D.M. de Kooning, Bart Meersman, Brecht ZwaenepoelDulal MannaОценок пока нет
- Arra Thesis 2015Документ86 страницArra Thesis 2015Dulal MannaОценок пока нет
- Guidelines PSCДокумент16 страницGuidelines PSCRajdeep BhadraОценок пока нет
- Guidelines PSCДокумент16 страницGuidelines PSCRajdeep BhadraОценок пока нет
- 1 PDFДокумент11 страниц1 PDFDulal MannaОценок пока нет
- The Dynamic Stability Analysis of Induction GeneratorsДокумент6 страницThe Dynamic Stability Analysis of Induction GeneratorsDulal MannaОценок пока нет
- A Complete Modeling and Simulation of Induction Generator Wind Power SystemsДокумент8 страницA Complete Modeling and Simulation of Induction Generator Wind Power SystemsSoumya MishraОценок пока нет
- IEEE Transactions On Energy Conversion, Vol.: Stale OFДокумент7 страницIEEE Transactions On Energy Conversion, Vol.: Stale OFDulal MannaОценок пока нет
- Sustainability 08 01143Документ19 страницSustainability 08 01143Dulal MannaОценок пока нет
- Water IndustriesДокумент13 страницWater IndustriesDulal MannaОценок пока нет
- Chen 2012Документ11 страницChen 2012Dulal MannaОценок пока нет
- Modeling and Control of A Wind Turbine Driven Doubly Fed Induction GeneratorДокумент11 страницModeling and Control of A Wind Turbine Driven Doubly Fed Induction GeneratorArief Noor RahmanОценок пока нет
- P3 (Mathworks - Ir Papernet)Документ9 страницP3 (Mathworks - Ir Papernet)mkashkooli_scribdОценок пока нет
- San Kar 2012Документ6 страницSan Kar 2012Dulal MannaОценок пока нет
- 07279122Документ4 страницы07279122Dulal MannaОценок пока нет
- Ridethrough of Wind Turbines With Doubly-Fed Induction Generator During A Voltage DipДокумент7 страницRidethrough of Wind Turbines With Doubly-Fed Induction Generator During A Voltage DipDulal MannaОценок пока нет
- Active and Reactive Power Control of A Doubly Fed Induction GeneratorДокумент8 страницActive and Reactive Power Control of A Doubly Fed Induction GeneratorDulal MannaОценок пока нет
- Hansen2006 PDFДокумент17 страницHansen2006 PDFDulal MannaОценок пока нет
- Ridethrough of Wind Turbines With Doubly-Fed Induction Generator During A Voltage DipДокумент7 страницRidethrough of Wind Turbines With Doubly-Fed Induction Generator During A Voltage DipDulal MannaОценок пока нет
- A Robust Control Scheme For Grid-Connected Voltage-Source InvertersДокумент11 страницA Robust Control Scheme For Grid-Connected Voltage-Source InvertersDulal MannaОценок пока нет
- P-f & Q-V dot droop controller improves microgrid frequency responseДокумент6 страницP-f & Q-V dot droop controller improves microgrid frequency responseDulal MannaОценок пока нет
- Actual Stage of The Research Regarding The AC Interferences On Common CorridorsДокумент6 страницActual Stage of The Research Regarding The AC Interferences On Common CorridorsDadi AzizОценок пока нет
- SUN2000-12-20KTL-M2 Datasheet - 17.05.2023Документ2 страницыSUN2000-12-20KTL-M2 Datasheet - 17.05.2023Nelson PalenciaОценок пока нет
- User Manual of ZHDCST Series Thyristor Rectifier Power Supply SystemДокумент35 страницUser Manual of ZHDCST Series Thyristor Rectifier Power Supply SystemColors Little ParkОценок пока нет
- Small Drives Geared Motors 12-600W v2010-07 enДокумент206 страницSmall Drives Geared Motors 12-600W v2010-07 enJair OjedaОценок пока нет
- Lamp LoadДокумент5 страницLamp LoadGirish Sahare100% (2)
- STPS3045CT/CG/CR/CP/CPI/CW/CFP: Power Schottky RectifierДокумент9 страницSTPS3045CT/CG/CR/CP/CPI/CW/CFP: Power Schottky Rectifierигорь федотовОценок пока нет
- Adaptive Lighting System For AutomobilesДокумент30 страницAdaptive Lighting System For AutomobilesDeepthi DsouzaОценок пока нет
- C5706 Nte2668Документ2 страницыC5706 Nte2668teack09Оценок пока нет
- IRS S 36-87 - Relay Interlocking SystemДокумент34 страницыIRS S 36-87 - Relay Interlocking SystemVikas Srivastav100% (9)
- 7UM62 - Rotor Earth Fault ProtectionДокумент26 страниц7UM62 - Rotor Earth Fault ProtectionfourwheelerОценок пока нет
- Solyndra200Series Datasheet - en.20110401.V3.U.uslДокумент2 страницыSolyndra200Series Datasheet - en.20110401.V3.U.uslSebastian DuarteОценок пока нет
- AN41001 2nd Generation PFC - High EfficiencyДокумент4 страницыAN41001 2nd Generation PFC - High EfficiencybmmostefaОценок пока нет
- 130+ D.C. Motor MCQs and Answers PDF DownloadДокумент5 страниц130+ D.C. Motor MCQs and Answers PDF DownloadEarl Jenn Abella100% (1)
- Ucc 28750Документ52 страницыUcc 28750eneas.baroneОценок пока нет
- 22MVA Transformer Relay Setting CalculationДокумент5 страниц22MVA Transformer Relay Setting Calculationrudra abhi100% (1)
- Proposed Residential Building Circuit DiagramДокумент1 страницаProposed Residential Building Circuit DiagrampersistentengineerОценок пока нет
- ASAD Malik Lab 02Документ1 страницаASAD Malik Lab 02Asad MalikОценок пока нет
- Store PV Energy: With Green Rhino Energy Storage SystemsДокумент2 страницыStore PV Energy: With Green Rhino Energy Storage SystemsRené López Victoria EscobarОценок пока нет
- Midterm 1Документ3 страницыMidterm 1Arjun SrinivasОценок пока нет
- SP-60-27 (LV Bus Ducts)Документ6 страницSP-60-27 (LV Bus Ducts)Hadi MoosaviОценок пока нет
- Rectifier SystemДокумент20 страницRectifier SystemDjebali MouradОценок пока нет
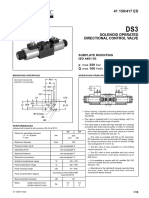
- Subplate Mounting ISO 4401-03 P Max: Bar Max L/minДокумент18 страницSubplate Mounting ISO 4401-03 P Max: Bar Max L/minmartinuskaОценок пока нет
- Cylindrical Fuse ProtectionДокумент3 страницыCylindrical Fuse ProtectionHendra AwanОценок пока нет
- Delhi Electricals - Repairing & Winding, All Kind of A.C., D.C. Motors, Tig. & Mig. Transfer, Ph.-09785850020 Electrical Quatitation ProfileДокумент5 страницDelhi Electricals - Repairing & Winding, All Kind of A.C., D.C. Motors, Tig. & Mig. Transfer, Ph.-09785850020 Electrical Quatitation ProfilemazlishkhanОценок пока нет
- Iris Power Epoxy Mica Capacitors (80 PF) : Partial Discharge Sensors For Testing High Voltage Electrical EquipmentДокумент2 страницыIris Power Epoxy Mica Capacitors (80 PF) : Partial Discharge Sensors For Testing High Voltage Electrical Equipmentmani_208eeОценок пока нет
- Free Energy GeneratorsДокумент4 страницыFree Energy GeneratorsDedi IrawanОценок пока нет
- Data SheetДокумент2 страницыData SheetSyedshabab HaiderОценок пока нет
- Te208 enДокумент4 страницыTe208 enMarian Ariciuc100% (3)
- Generator protection setting value list REV2Документ9 страницGenerator protection setting value list REV2Reza MuhammadОценок пока нет
- PM5110 powermeter specificationsДокумент2 страницыPM5110 powermeter specificationsZoran NesicОценок пока нет
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesОт EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- Build Your Own Electric Vehicle, Third EditionОт EverandBuild Your Own Electric Vehicle, Third EditionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureОт EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureРейтинг: 3.5 из 5 звезд3.5/5 (48)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentОт EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОт EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОценок пока нет
- Asset Integrity Management for Offshore and Onshore StructuresОт EverandAsset Integrity Management for Offshore and Onshore StructuresОценок пока нет
- Nuclear Energy in the 21st Century: World Nuclear University PressОт EverandNuclear Energy in the 21st Century: World Nuclear University PressРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Shorting the Grid: The Hidden Fragility of Our Electric GridОт EverandShorting the Grid: The Hidden Fragility of Our Electric GridРейтинг: 4.5 из 5 звезд4.5/5 (2)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyОт EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyОценок пока нет
- The Rare Metals War: the dark side of clean energy and digital technologiesОт EverandThe Rare Metals War: the dark side of clean energy and digital technologiesРейтинг: 5 из 5 звезд5/5 (2)
- Industrial Piping and Equipment Estimating ManualОт EverandIndustrial Piping and Equipment Estimating ManualРейтинг: 5 из 5 звезд5/5 (7)
- Implementing an Integrated Management System (IMS): The strategic approachОт EverandImplementing an Integrated Management System (IMS): The strategic approachРейтинг: 5 из 5 звезд5/5 (2)
- Handbook on Battery Energy Storage SystemОт EverandHandbook on Battery Energy Storage SystemРейтинг: 4.5 из 5 звезд4.5/5 (2)
- ISO 50001: A strategic guide to establishing an energy management systemОт EverandISO 50001: A strategic guide to establishing an energy management systemОценок пока нет
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОт EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОценок пока нет
- Natural Gas Processing: Technology and Engineering DesignОт EverandNatural Gas Processing: Technology and Engineering DesignРейтинг: 5 из 5 звезд5/5 (8)
- Operational Amplifier Circuits: Analysis and DesignОт EverandOperational Amplifier Circuits: Analysis and DesignРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Well Control for Completions and InterventionsОт EverandWell Control for Completions and InterventionsРейтинг: 4 из 5 звезд4/5 (10)
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AОт EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AРейтинг: 5 из 5 звезд5/5 (1)
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksОт EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksОценок пока нет