Вам также может понравиться
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesОт EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesРейтинг: 1.5 из 5 звезд1.5/5 (2)
- Solutions AIATS JEE (Adv) 2020 Test-1A (Paper-2) (Code-E & F) 13-10-2019Документ16 страницSolutions AIATS JEE (Adv) 2020 Test-1A (Paper-2) (Code-E & F) 13-10-2019IlaОценок пока нет
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27От EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Оценок пока нет
- Electronics Test Solution Made EasyДокумент20 страницElectronics Test Solution Made EasyAyush DixitОценок пока нет
- All India Aakash Test Series For JEE (Advanced) - 2022: TEST - 2A (Paper-1) - Code-EДокумент10 страницAll India Aakash Test Series For JEE (Advanced) - 2022: TEST - 2A (Paper-1) - Code-EManjit PandaОценок пока нет
- Basic Matrix Analysis and Synthesis: With Applications to Electronic EngineeringОт EverandBasic Matrix Analysis and Synthesis: With Applications to Electronic EngineeringОценок пока нет
- HT TP: //qpa Pe R.W But .Ac .In: 2012 Control System-IДокумент7 страницHT TP: //qpa Pe R.W But .Ac .In: 2012 Control System-Ipaku deyОценок пока нет
- Cim 101 PDFДокумент7 страницCim 101 PDFpaku deyОценок пока нет
- Ee 2005Документ20 страницEe 2005phoenix226Оценок пока нет
- All India Aakash Test Series For JEE (Advanced) - 2020: TEST - 3A (Paper-2) - Code-CДокумент26 страницAll India Aakash Test Series For JEE (Advanced) - 2020: TEST - 3A (Paper-2) - Code-CanujОценок пока нет
- 990uf Eeec-ControlДокумент25 страниц990uf Eeec-ControlMarshaОценок пока нет
- Lakshya JEE (2024)Документ10 страницLakshya JEE (2024)sunilbadgoti488Оценок пока нет
- Indian Institute of Technology MadrasДокумент3 страницыIndian Institute of Technology MadrasRam Lakhan MeenaОценок пока нет
- Physics SyllabusДокумент8 страницPhysics Syllabussinghayush.cktОценок пока нет
- Solution of AIATS Test 8 For JEE Adv.-2015 (P-1 & P-2)Документ17 страницSolution of AIATS Test 8 For JEE Adv.-2015 (P-1 & P-2)Chirag KaushikОценок пока нет
- Test 1 1 PDFДокумент19 страницTest 1 1 PDFNageswara Rao RatipalliОценок пока нет
- Practice Test 10 - (Hints & Solution) - Prayas JEE 2024Документ13 страницPractice Test 10 - (Hints & Solution) - Prayas JEE 2024pwlive810Оценок пока нет
- Laplace COEP Updated PDFДокумент9 страницLaplace COEP Updated PDFJayashree MisalОценок пока нет
- 1st Year Previous Year PapersДокумент30 страниц1st Year Previous Year PapersJay DubalОценок пока нет
- EE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoДокумент3 страницыEE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoAmal AhmedОценок пока нет
- Process Dynamics and Control 4th Class HW PDFДокумент13 страницProcess Dynamics and Control 4th Class HW PDFZaidoon MohsinОценок пока нет
- ASSIGNMENT Teacherapptemproot280 20230821123852Документ7 страницASSIGNMENT Teacherapptemproot280 20230821123852syaОценок пока нет
- JEE Mains Kinematics in 2D - Sol-1 - EzyexamsolutionДокумент5 страницJEE Mains Kinematics in 2D - Sol-1 - EzyexamsolutionThe TechnocaveОценок пока нет
- Maths Class 12 BoardДокумент10 страницMaths Class 12 Boardallivyakaur13Оценок пока нет
- One Option Correct QuestionsДокумент5 страницOne Option Correct QuestionsJoseОценок пока нет
- Root Locus: Practice Sheet 01 (By Diptanshu Sir)Документ10 страницRoot Locus: Practice Sheet 01 (By Diptanshu Sir)Aryan TejanОценок пока нет
- Key Sheet: Iit-Xi-Reg CPT-03 Date:23-08-2021 JEE Mains Model Max - Marks:300Документ11 страницKey Sheet: Iit-Xi-Reg CPT-03 Date:23-08-2021 JEE Mains Model Max - Marks:300Newcentury GamerОценок пока нет
- TEST - 13: (Paper - II)Документ17 страницTEST - 13: (Paper - II)SasankОценок пока нет
- Electrical Engg 2005Документ20 страницElectrical Engg 2005chandrakanthОценок пока нет
- EEET2109 MST 2014 Answers PDFДокумент4 страницыEEET2109 MST 2014 Answers PDFCollin lcwОценок пока нет
- St-Ii De&t inДокумент2 страницыSt-Ii De&t inSarthakОценок пока нет
- Mathematics: Answer & SolutionДокумент5 страницMathematics: Answer & SolutionBhupatrai FalduОценок пока нет
- Electronics & Comm 2005Документ24 страницыElectronics & Comm 2005dixson1965Оценок пока нет
- JEST Question Paper 2016Документ12 страницJEST Question Paper 2016Jay BhambureОценок пока нет
- Mathematics DPP NO. 69 (Advanced) JEE (Main-Advanced) 2021Документ2 страницыMathematics DPP NO. 69 (Advanced) JEE (Main-Advanced) 2021MeenaОценок пока нет
- Solutions - AIATS - JEE (A) 2020 - Test-2A - (Paper-1) - (Code-A & B) - 18-08-2019 PDFДокумент20 страницSolutions - AIATS - JEE (A) 2020 - Test-2A - (Paper-1) - (Code-A & B) - 18-08-2019 PDFPriyankaОценок пока нет
- Me Math 3Документ4 страницыMe Math 3Kushal RocksОценок пока нет
- DPP-13 Without AnswerДокумент4 страницыDPP-13 Without AnswerAbhijeet DixitОценок пока нет
- Hysicsaholics: Video Solution On Website:-Video Solution On Youtube: - Written Solution On YoutubeДокумент2 страницыHysicsaholics: Video Solution On Website:-Video Solution On Youtube: - Written Solution On Youtubeamber kaushikОценок пока нет
- Test-2 - Vtrol Systems PDFДокумент19 страницTest-2 - Vtrol Systems PDFSumit KumarОценок пока нет
- Past Year Final Question (20092010 (2) ) SOLUTIONДокумент10 страницPast Year Final Question (20092010 (2) ) SOLUTIONTon ElyОценок пока нет
- 01 GR Kinematics NLM Friction Work Power Energy Circular Motion PDFДокумент9 страниц01 GR Kinematics NLM Friction Work Power Energy Circular Motion PDFHappy SinghОценок пока нет
- One and A Half HoursДокумент6 страницOne and A Half HoursMHUM84Оценок пока нет
- Ce 2009 PDFДокумент12 страницCe 2009 PDFAnnu MorОценок пока нет
- Week 2 Assignment PDFДокумент4 страницыWeek 2 Assignment PDFGanesh RadharamОценок пока нет
- Homework 1Документ2 страницыHomework 1Vu LeОценок пока нет
- AIATS JEE (A) 2022 Test-4A P-2 (Code-B) Sol FINALДокумент12 страницAIATS JEE (A) 2022 Test-4A P-2 (Code-B) Sol FINALAkshanda AludiyaОценок пока нет
- Amity International School, Pushp Vihar SAMPLE PAPER, CLASS-11, Term-1 (2023-24)Документ7 страницAmity International School, Pushp Vihar SAMPLE PAPER, CLASS-11, Term-1 (2023-24)Laksh KhetrapalОценок пока нет
- N N N N: The Images Are Appearing Blurred As We Have Tried To Keep Small Size of The PDFДокумент11 страницN N N N: The Images Are Appearing Blurred As We Have Tried To Keep Small Size of The PDFTATHAGATA MACHERLAОценок пока нет
- Solutions: Mock Test 1Документ11 страницSolutions: Mock Test 1Lokesh KumarОценок пока нет
- Sample Paper Term I XiiДокумент7 страницSample Paper Term I XiiAshutosh SinghОценок пока нет
- Black Board Problems For JEE Advanced Set-6Документ6 страницBlack Board Problems For JEE Advanced Set-6DikshantОценок пока нет
- Isi Msqe 10 Years Solutions PDFДокумент161 страницаIsi Msqe 10 Years Solutions PDFritik goelОценок пока нет
- HW9 SolutionsДокумент5 страницHW9 SolutionsAndreas mОценок пока нет
- All India Aakash Test Series For JEE (Advanced) - 2022: TEST - 1A (Paper-1) - Code-EДокумент9 страницAll India Aakash Test Series For JEE (Advanced) - 2022: TEST - 1A (Paper-1) - Code-ENITIN NBNBОценок пока нет
- SR Elite, Aiims S60, Neet MPL & Medicon Aiims Grand Test - 8 Paper Key - 04-02-19Документ4 страницыSR Elite, Aiims S60, Neet MPL & Medicon Aiims Grand Test - 8 Paper Key - 04-02-19Ayan GhoshОценок пока нет
- Ce - M401 - Mathematics Iii - R16Документ5 страницCe - M401 - Mathematics Iii - R16samayan bhattacharyaОценок пока нет
- Part 04 SET (31-34)Документ4 страницыPart 04 SET (31-34)zeesОценок пока нет
- Test 1 Review 0314-1314 Summer2020Документ6 страницTest 1 Review 0314-1314 Summer2020Natalia RincónОценок пока нет
- 48-New Product Success Stories - Rubik's CubeДокумент4 страницы48-New Product Success Stories - Rubik's CubeamithbaluОценок пока нет
- 48-New Product Success Stories - Rubik's CubeДокумент4 страницы48-New Product Success Stories - Rubik's CubeamithbaluОценок пока нет
- Marketing Management Group AssignmentДокумент3 страницыMarketing Management Group AssignmentamithbaluОценок пока нет
- BSC Nursing BrouchureДокумент22 страницыBSC Nursing BrouchureamithbaluОценок пока нет
- Bata India Limited Service Deficiency CaseДокумент2 страницыBata India Limited Service Deficiency CaseamithbaluОценок пока нет
- K-Test 2019 Ece Schedule: Network AnalysisДокумент5 страницK-Test 2019 Ece Schedule: Network AnalysisamithbaluОценок пока нет
- FM Bugger: Chandra Reddy SirДокумент13 страницFM Bugger: Chandra Reddy SiramithbaluОценок пока нет
- Email Writing SkillsДокумент12 страницEmail Writing SkillsamithbaluОценок пока нет
- 5.2.1 Bicmos Process Flow: NextДокумент5 страниц5.2.1 Bicmos Process Flow: NextamithbaluОценок пока нет
- ESE-2017: Prelims Exam: E & T EngineeringДокумент9 страницESE-2017: Prelims Exam: E & T EngineeringamithbaluОценок пока нет
- Quantitative Ability (SEC-A: 34%) : Area Chapter/Concept Syllabus CompletedДокумент1 страницаQuantitative Ability (SEC-A: 34%) : Area Chapter/Concept Syllabus CompletedamithbaluОценок пока нет
- r11 - E1 - Students Class Wise ListДокумент46 страницr11 - E1 - Students Class Wise ListamithbaluОценок пока нет
- r09 - E3 - Students Class Wise ListДокумент139 страницr09 - E3 - Students Class Wise Listamithbalu0% (1)
- r10 - E2 - Students Class Wise ListДокумент93 страницыr10 - E2 - Students Class Wise ListamithbaluОценок пока нет
- Permutaions and CombinationsДокумент25 страницPermutaions and CombinationsamithbaluОценок пока нет
- Transaction Acknowledgment: Dear CandidateДокумент1 страницаTransaction Acknowledgment: Dear CandidateamithbaluОценок пока нет
- Quotation For CCTV Camera 2017 2019Документ3 страницыQuotation For CCTV Camera 2017 2019amithbalu100% (1)
- Artificial Neural Networks - MiniProjectДокумент16 страницArtificial Neural Networks - MiniProjectamithbalu100% (1)
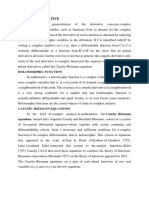
- Complex DerivativeДокумент2 страницыComplex DerivativeDhamu DharanОценок пока нет
- Lec3 Gradient Based Method Part IДокумент30 страницLec3 Gradient Based Method Part IAbhay JindalОценок пока нет
- Pima Indians Diabetes Database Analysis - KaggleДокумент37 страницPima Indians Diabetes Database Analysis - KaggleAbhinav DegaОценок пока нет
- Jasco HPLC ManualДокумент40 страницJasco HPLC ManualanangОценок пока нет
- Heat Conduction in Cylindrical and Spherical Coordinates IДокумент14 страницHeat Conduction in Cylindrical and Spherical Coordinates IMohammed Siddique25% (4)
- System+Dynamics+3+Edition+WillPALM (043 083)Документ41 страницаSystem+Dynamics+3+Edition+WillPALM (043 083)Rosy Chávez Hernández100% (1)
- Summary of Convergence - TestsДокумент3 страницыSummary of Convergence - TestsmelatОценок пока нет
- Co1 - Measure of Central TendenciesДокумент61 страницаCo1 - Measure of Central TendenciesRFSОценок пока нет
- Eye Level Math Olympiad Grade 2 PracticeДокумент13 страницEye Level Math Olympiad Grade 2 Practicetoga lubis100% (3)
- Solucionario Econometría Jeffrey M. WooldridgeДокумент4 страницыSolucionario Econometría Jeffrey M. WooldridgeHéctor F Bonilla3% (30)
- Laplace TableДокумент2 страницыLaplace TableNellyn Joy Castillon ValenzuelaОценок пока нет
- Unit 1 (Relations and Functions)Документ17 страницUnit 1 (Relations and Functions)Manjeet Singh RATHOREОценок пока нет
- HPLC Method For Determination of Paracetamol in Pharmaceutical Formulations and Environmental Water SamplesДокумент11 страницHPLC Method For Determination of Paracetamol in Pharmaceutical Formulations and Environmental Water SamplesvgguygfОценок пока нет
- Mean Value TheoremДокумент4 страницыMean Value Theorembella_duaneОценок пока нет
- QM10 Tif Ch09Документ24 страницыQM10 Tif Ch09Lour RaganitОценок пока нет
- Control Theory PDFДокумент86 страницControl Theory PDFapi-3755845100% (1)
- 1 Doe TerminologiesДокумент3 страницы1 Doe TerminologiesSethu Malaravan K EОценок пока нет
- Statistics Project - Final DraftДокумент10 страницStatistics Project - Final DraftShaurya ParnamiОценок пока нет
- Content AnalysisДокумент19 страницContent AnalysisChandan Das100% (1)
- 1Документ2 страницы1KaeОценок пока нет
- Practice - Test - 2 - Systems - of - Inequalities 4Документ4 страницыPractice - Test - 2 - Systems - of - Inequalities 4Destiny OnealОценок пока нет
- Reviewer Eapp Lesson 1-8Документ8 страницReviewer Eapp Lesson 1-8Angel GarciaОценок пока нет
- Reverse DCFДокумент6 страницReverse DCFErvin Khouw0% (1)
- Continuous Ran VarДокумент12 страницContinuous Ran VarJoshОценок пока нет
- Valuation-Dividend Discount ModelДокумент23 страницыValuation-Dividend Discount Modelswaroop shettyОценок пока нет
- Unit 1 Laplace TransformsДокумент7 страницUnit 1 Laplace TransformsCharan V ChanОценок пока нет
- Chapter3 PDFДокумент56 страницChapter3 PDFkeith mushiningaОценок пока нет
- Maths Section CДокумент6 страницMaths Section CManish KumarОценок пока нет
- Introduction To Numerical Methods For Variational Problems PDFДокумент216 страницIntroduction To Numerical Methods For Variational Problems PDFmottenerОценок пока нет
- Summary and Interpretation of Reality TransurfingОт EverandSummary and Interpretation of Reality TransurfingРейтинг: 5 из 5 звезд5/5 (5)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldОт EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldРейтинг: 3.5 из 5 звезд3.5/5 (64)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseОт EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseРейтинг: 3.5 из 5 звезд3.5/5 (69)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceОт EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceРейтинг: 4 из 5 звезд4/5 (51)
- Bedeviled: A Shadow History of Demons in ScienceОт EverandBedeviled: A Shadow History of Demons in ScienceРейтинг: 5 из 5 звезд5/5 (5)
- Quantum Physics: What Everyone Needs to KnowОт EverandQuantum Physics: What Everyone Needs to KnowРейтинг: 4.5 из 5 звезд4.5/5 (49)
- The End of Everything: (Astrophysically Speaking)От EverandThe End of Everything: (Astrophysically Speaking)Рейтинг: 4.5 из 5 звезд4.5/5 (157)
- A Natural History of Color: The Science Behind What We See and How We See itОт EverandA Natural History of Color: The Science Behind What We See and How We See itРейтинг: 4 из 5 звезд4/5 (13)
- A Brief History of Time: From the Big Bang to Black HolesОт EverandA Brief History of Time: From the Big Bang to Black HolesРейтинг: 4 из 5 звезд4/5 (2193)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterОт EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterРейтинг: 4.5 из 5 звезд4.5/5 (410)
- Infinite Powers: How Calculus Reveals the Secrets of the UniverseОт EverandInfinite Powers: How Calculus Reveals the Secrets of the UniverseРейтинг: 4.5 из 5 звезд4.5/5 (126)
- The Beginning of Infinity: Explanations That Transform the WorldОт EverandThe Beginning of Infinity: Explanations That Transform the WorldРейтинг: 5 из 5 звезд5/5 (60)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessОт EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessРейтинг: 4 из 5 звезд4/5 (6)
- Lost in Math: How Beauty Leads Physics AstrayОт EverandLost in Math: How Beauty Leads Physics AstrayРейтинг: 4.5 из 5 звезд4.5/5 (125)
- Packing for Mars: The Curious Science of Life in the VoidОт EverandPacking for Mars: The Curious Science of Life in the VoidРейтинг: 4 из 5 звезд4/5 (1396)
- Mastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicОт EverandMastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicРейтинг: 4 из 5 звезд4/5 (91)
- The 60 Minute Quantum Physics Book: Science Made Easy For Beginners Without Math And In Plain Simple EnglishОт EverandThe 60 Minute Quantum Physics Book: Science Made Easy For Beginners Without Math And In Plain Simple EnglishРейтинг: 4.5 из 5 звезд4.5/5 (4)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОт EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОценок пока нет
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldОт EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldРейтинг: 4.5 из 5 звезд4.5/5 (54)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionОт EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismОт EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismРейтинг: 4 из 5 звезд4/5 (500)