Вам также может понравиться
- Diagramas de Bode - 20Документ6 страницDiagramas de Bode - 20Rodrigo FilhoОценок пока нет
- Projeto de Filtro Passa-Faixa Com Auxili PDFДокумент21 страницаProjeto de Filtro Passa-Faixa Com Auxili PDFArceu CamposОценок пока нет
- Modelagem de ConversoresДокумент220 страницModelagem de ConversoresAndré Luiz Marcelino100% (1)
- Boost CCM Completo PDFДокумент150 страницBoost CCM Completo PDFArceu CamposОценок пока нет
- Controle e Observabilidade de Sistemas DinâmicosДокумент10 страницControle e Observabilidade de Sistemas DinâmicosDeborah S. FructuosoОценок пока нет
- Projetos de Inversores PDFДокумент215 страницProjetos de Inversores PDFArceu CamposОценок пока нет
- Filtro Passa-Faixa Digital Resposta Finita Ao Impulso DSPДокумент7 страницFiltro Passa-Faixa Digital Resposta Finita Ao Impulso DSPArceu CamposОценок пока нет
- Polos - Zeros e Estabilidade - 2011 - 2 PDFДокумент29 страницPolos - Zeros e Estabilidade - 2011 - 2 PDFBruno AlvimОценок пока нет
- Apostila PFC DCMДокумент155 страницApostila PFC DCMAldenir GonçalvesОценок пока нет
- Push Pull Alimentado em Corrente 2015Документ73 страницыPush Pull Alimentado em Corrente 2015Arceu CamposОценок пока нет
- Bidirecionais CompletoДокумент99 страницBidirecionais CompletoArceu CamposОценок пока нет
- Retificadores MultipulsosДокумент154 страницыRetificadores MultipulsosArceu CamposОценок пока нет
- Eletr Pot1 25Документ24 страницыEletr Pot1 25Daniel Gonçalves AraujoОценок пока нет
- Boost CCM Completo PDFДокумент150 страницBoost CCM Completo PDFArceu CamposОценок пока нет
- Field BusДокумент3 страницыField BusArceu CamposОценок пока нет
- Desenvolvimento de conversor Flyback para atuador piezoelétricoДокумент0 страницDesenvolvimento de conversor Flyback para atuador piezoelétricoMarcelo MarcosОценок пока нет
- Serie de Fourier de Tempo DiscretoДокумент22 страницыSerie de Fourier de Tempo DiscretoArceu CamposОценок пока нет
- Avaliação Recuperação C.E.P - 1 - 2015 PDFДокумент17 страницAvaliação Recuperação C.E.P - 1 - 2015 PDFArceu Campos100% (3)
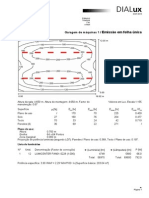
- Garagem de Máquinas 1 - AmpliaçãoДокумент1 страницаGaragem de Máquinas 1 - AmpliaçãoArceu CamposОценок пока нет
- Continuação 05062014Документ2 страницыContinuação 05062014Arceu CamposОценок пока нет
- Montagem e dimensionamento de motor CCДокумент13 страницMontagem e dimensionamento de motor CCArceu CamposОценок пока нет
- Ementa DEELДокумент4 страницыEmenta DEELArceu CamposОценок пока нет
- Relatório MITДокумент8 страницRelatório MITArceu CamposОценок пока нет
- Catálogo de Cabos CondutoresДокумент54 страницыCatálogo de Cabos CondutoresDeryckAzeredoОценок пока нет
- Cópia não autorizadaДокумент58 страницCópia não autorizadaArceu Campos83% (12)
- Apostila Laboratorio CE1Документ28 страницApostila Laboratorio CE1Nestor JuniorОценок пока нет
- 20131-Prova 1 - CDP-Parte 2Документ1 страница20131-Prova 1 - CDP-Parte 2Arceu CamposОценок пока нет
- Calculadora de Impedâ NciaДокумент10 страницCalculadora de Impedâ NciaJuan MiguelОценок пока нет
- Aquisição de Dados e Condicionamento de SinaisДокумент6 страницAquisição de Dados e Condicionamento de SinaisEric DilgerОценок пока нет
- Exercí Cios de Revisã O: E A V RДокумент4 страницыExercí Cios de Revisã O: E A V RPandora RostyОценок пока нет
- Heterodinagem e analisador espectral analógicoДокумент77 страницHeterodinagem e analisador espectral analógicoIngryd MailaОценок пока нет
- Transmissão Digital de Dados em Engenharia de TelecomunicaçõesДокумент6 страницTransmissão Digital de Dados em Engenharia de TelecomunicaçõesMariana MendonçaОценок пока нет
- AUDIO POWER AMPLIFIER SPECIFICATIONSДокумент183 страницыAUDIO POWER AMPLIFIER SPECIFICATIONSTécnica AVОценок пока нет
- Métodos de Compressão de DadosДокумент6 страницMétodos de Compressão de Dadosnarciso_ornelasОценок пока нет
- Análise de estabilidade de sistema de controle de nível de líquido com e sem atraso de transporteДокумент15 страницAnálise de estabilidade de sistema de controle de nível de líquido com e sem atraso de transporteAna Luiza MoraisОценок пока нет
- Recuperação 6 Ano Algarismos RomanosДокумент2 страницыRecuperação 6 Ano Algarismos RomanosJULIANA MENDESОценок пока нет
- Em 01463Документ14 страницEm 01463Oscar NieblaОценок пока нет
- ECG Análisis GuíaДокумент106 страницECG Análisis GuíaLuis F Concha ManriquezОценок пока нет
- Power AnalyserДокумент5 страницPower AnalysertreaxОценок пока нет
- Matemática - Leitura e escrita de números até centenasДокумент5 страницMatemática - Leitura e escrita de números até centenasCarolina100% (1)