Вам также может понравиться
- Ketuntasan PsikomotrДокумент1 страницаKetuntasan PsikomotrPhilipus MakingОценок пока нет
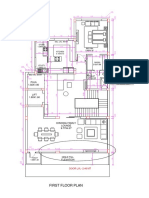
- First Floor Plan: Puja 1.92X1.80Документ1 страницаFirst Floor Plan: Puja 1.92X1.80Zulkarnain RezaОценок пока нет
- Pages From Manual Design of Concrete Building Structures To Eurocode 2Документ1 страницаPages From Manual Design of Concrete Building Structures To Eurocode 2SelvasathaОценок пока нет
- Captura de Pantalla 2022-10-17 A La(s) 11.31.03Документ10 страницCaptura de Pantalla 2022-10-17 A La(s) 11.31.03Jorge AVОценок пока нет
- Apartment PlansДокумент1 страницаApartment PlansRALPH ANDREW ESPERONОценок пока нет
- Grd. Fl. Reflected Clg. Plan: A B' C C' D BДокумент1 страницаGrd. Fl. Reflected Clg. Plan: A B' C C' D BAngelico EkleoОценок пока нет
- Dashboard Modal 3Документ18 страницDashboard Modal 3Tinu AgrawalОценок пока нет
- 2 Arch First PDFДокумент1 страница2 Arch First PDF114 Gopal jagtapОценок пока нет
- Modulo Del Paseo Del Lago-ModelДокумент1 страницаModulo Del Paseo Del Lago-ModelMaria Magdalena Torres RodriguezОценок пока нет
- Data Responden 100: Regression of Ability On Mean Score. Group: 1Документ2 страницыData Responden 100: Regression of Ability On Mean Score. Group: 1Adk AlkipОценок пока нет
- Planta Acotada-Apto 202Документ1 страницаPlanta Acotada-Apto 202Arq. Saraí RodríguezОценок пока нет
- Planta Primer Piso Dibujo BasicoДокумент1 страницаPlanta Primer Piso Dibujo BasicoYair CbОценок пока нет
- VN049 - ID Junction Long Thanh - Sale Gallery - HO SO KIEN TRUC TONG MAT BANG 1-500Документ1 страницаVN049 - ID Junction Long Thanh - Sale Gallery - HO SO KIEN TRUC TONG MAT BANG 1-500nguyenleyenoanh95Оценок пока нет
- Francisco 01Документ1 страницаFrancisco 01Juliana MantovaniОценок пока нет
- Lamina 6 de 6 Perfiles LongitudinalesДокумент1 страницаLamina 6 de 6 Perfiles LongitudinalesCristobal MenaresОценок пока нет
- Stanovi VlaeДокумент4 страницыStanovi VlaePavle KrstevskiОценок пока нет
- Gambar-5.5 Bendung Dari Sistem Pengadaan Air Bagian Tengah Di Sungai AyungДокумент16 страницGambar-5.5 Bendung Dari Sistem Pengadaan Air Bagian Tengah Di Sungai AyungYusuf HermantoОценок пока нет
- Gráficas Del Sistema Pentano HeptanoДокумент2 страницыGráficas Del Sistema Pentano HeptanoDiego InfanteОценок пока нет
- FdlyrhmanДокумент1 страницаFdlyrhmanMeyke AfsariОценок пока нет
- San Gabriel 198 - REPLANTEO PLANTA BAJA RAMPAДокумент1 страницаSan Gabriel 198 - REPLANTEO PLANTA BAJA RAMPAAylen GimenezОценок пока нет
- Electric eДокумент1 страницаElectric eahmed lionОценок пока нет
- Alan Copa Unidad Habitacional 2Документ1 страницаAlan Copa Unidad Habitacional 2Mamani Copa Alan AlejandroОценок пока нет
- Chapter 04Документ15 страницChapter 04dedhi yustendi ternakОценок пока нет
- Plano Casa Planta6x6 Terreno7x15 2p 3d 1.5b Verplanos - Com 0029Документ1 страницаPlano Casa Planta6x6 Terreno7x15 2p 3d 1.5b Verplanos - Com 0029ARENAS VERGARA GUSTAVO ANGEL ARQUITECTURAОценок пока нет
- Planta Por CorregirДокумент1 страницаPlanta Por CorregirCristhian Camizan CordovaОценок пока нет
- Lavandería: Primer NivelДокумент1 страницаLavandería: Primer NivelYn IngaОценок пока нет
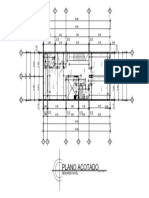
- PLANO ACOTADO SEGUNDO-Layout1Документ1 страницаPLANO ACOTADO SEGUNDO-Layout1GHOST FREEОценок пока нет
- Potrerito Noviembre 2023-EstrДокумент1 страницаPotrerito Noviembre 2023-Estrcamilo medinaОценок пока нет
- Bangunan Air-21Документ1 страницаBangunan Air-21CawapresОценок пока нет
- Cerco PropuestoДокумент1 страницаCerco PropuestoMarcos Ramirez CruzОценок пока нет
- Tercer Piso Casa A1Документ1 страницаTercer Piso Casa A1santiago paris beltranОценок пока нет
- App E.1.4 - UC Plot (Cellar Deck) 1yr NDLLДокумент1 страницаApp E.1.4 - UC Plot (Cellar Deck) 1yr NDLLadlanamran2Оценок пока нет
- 2 49 PDFДокумент2 страницы2 49 PDFBeny SimpsonОценок пока нет
- Application Analysis of Equalizing Load Lifting Bars To PDFДокумент35 страницApplication Analysis of Equalizing Load Lifting Bars To PDFHaluk KayaОценок пока нет
- Ss-Hh-Model AДокумент1 страницаSs-Hh-Model ARobert Mendoza QuispeОценок пока нет
- App E.1.2 - UC Plot (Mezzanine Deck) 1yr NDLLДокумент1 страницаApp E.1.2 - UC Plot (Mezzanine Deck) 1yr NDLLadlanamran2Оценок пока нет
- ArchitecturalДокумент7 страницArchitecturaluapsaua.rubiteОценок пока нет
- Elementos Dentro Del Plano para SeguridadДокумент1 страницаElementos Dentro Del Plano para SeguridadAntony William Núñez RomanОценок пока нет
- PLanosДокумент4 страницыPLanosRICKY JOSUE COPEОценок пока нет
- Final Test 40 (2) (-ModelДокумент1 страницаFinal Test 40 (2) (-ModelhedayatullahОценок пока нет
- Compt. 1Документ1 страницаCompt. 1tesis - 2019 UCVОценок пока нет
- Practica Cacsire 2Документ1 страницаPractica Cacsire 2tesis - 2019 UCVОценок пока нет
- Ejemplo 8.15 Seader: Edward Alejandro TorresДокумент5 страницEjemplo 8.15 Seader: Edward Alejandro TorresPaulina Velandia LopezОценок пока нет
- 6.976 - High Speed Circuits and Systems Smith Chart: Normalized Impedance and Admittance CoordinatesДокумент1 страница6.976 - High Speed Circuits and Systems Smith Chart: Normalized Impedance and Admittance CoordinatesRohishkumarReddy MittaОценок пока нет
- 7 PDFДокумент1 страница7 PDFArif RasheedОценок пока нет
- Alan Copa Unidad Habitacional 3Документ1 страницаAlan Copa Unidad Habitacional 3Mamani Copa Alan AlejandroОценок пока нет
- Alan Copa Unidad Habitacional 3Документ1 страницаAlan Copa Unidad Habitacional 3Mamani Copa Alan AlejandroОценок пока нет
- Working Drawing and Presentation Drawing in AutocadДокумент1 страницаWorking Drawing and Presentation Drawing in AutocadGurbaksh SinghОценок пока нет
- Rating Curve.K. LututДокумент28 страницRating Curve.K. LututdizuОценок пока нет
- ARQUITECTONICOДокумент1 страницаARQUITECTONICOJuliana BaccaОценок пока нет
- MA4X159AДокумент2 страницыMA4X159Atahir0732Оценок пока нет
- Planta CORTE 1-1: Cocina LavanderíaДокумент1 страницаPlanta CORTE 1-1: Cocina Lavanderíamaria fernanda aransaenzОценок пока нет
- EX PRESION 1 RRRДокумент1 страницаEX PRESION 1 RRRDen JuaniquinaОценок пока нет
- Sra Juana PDFДокумент1 страницаSra Juana PDFYanet BarretoОценок пока нет
- Mc-Cabe Thiele CurveДокумент1 страницаMc-Cabe Thiele CurveDian Citra Sukma DewiОценок пока нет
- Floor Layout: It Inn R Ur I NIN It Urnitur UTДокумент1 страницаFloor Layout: It Inn R Ur I NIN It Urnitur UTJohari YanevaОценок пока нет
- A.Ll Canopy 1 S2 A.N-Local 1 2 S2 5Документ1 страницаA.Ll Canopy 1 S2 A.N-Local 1 2 S2 5daliОценок пока нет
- Smith Chart YДокумент1 страницаSmith Chart YJosé ZambranoОценок пока нет
- AdobeДокумент1 страницаAdobedara quillahuamanОценок пока нет
- Objective-Oriented Power Quality Compensation of Multi-Functional Grid-Tied Inverters and Its Application in Micro-GridsДокумент3 страницыObjective-Oriented Power Quality Compensation of Multi-Functional Grid-Tied Inverters and Its Application in Micro-GridsKarimullaSkОценок пока нет
- Signals A. General ProvisionsДокумент77 страницSignals A. General ProvisionsKarimullaSkОценок пока нет
- NWR SR CH3 EngДокумент39 страницNWR SR CH3 EngKarimullaSkОценок пока нет
- Defined Why An M-File?Документ4 страницыDefined Why An M-File?KarimullaSkОценок пока нет
- MAAB Style Guideline Version2p2 PDFДокумент113 страницMAAB Style Guideline Version2p2 PDFKarimullaSkОценок пока нет
- Call LetterДокумент2 страницыCall LetterKarimullaSkОценок пока нет
- Fig: Simulink Model of Proposed Hybrid Generation SystemДокумент3 страницыFig: Simulink Model of Proposed Hybrid Generation SystemKarimullaSkОценок пока нет
- Screen ShotsДокумент3 страницыScreen ShotsKarimullaSkОценок пока нет
- M1 - Djonrae N. GalvezДокумент5 страницM1 - Djonrae N. GalvezDjonraeNarioGalvezОценок пока нет
- DBMS - Part 1 - IntroductionДокумент45 страницDBMS - Part 1 - IntroductionINN ChannelОценок пока нет
- Week 7 - Adaptable Kanban System Maintains JIT ProductionДокумент36 страницWeek 7 - Adaptable Kanban System Maintains JIT ProductionQuynh Chau TranОценок пока нет
- Lecture - 8 - Statistics - Standard Deviation - Dr. (MRS) - Neelam YadavДокумент31 страницаLecture - 8 - Statistics - Standard Deviation - Dr. (MRS) - Neelam YadavayushiОценок пока нет
- Ex:6 Develop An Application That Makes Use of RSS Feed. (To Provide Internet Options in Android)Документ6 страницEx:6 Develop An Application That Makes Use of RSS Feed. (To Provide Internet Options in Android)Sarath SarathkumarОценок пока нет
- 320D2 Excavator XBA00001-UP (MACHINE) POWERED BY C7.1 Engine (M0065912 - 10) - Front GlassДокумент2 страницы320D2 Excavator XBA00001-UP (MACHINE) POWERED BY C7.1 Engine (M0065912 - 10) - Front GlassAbi ManyuОценок пока нет
- Design PortfolioДокумент20 страницDesign PortfolioArda ÖzdemirОценок пока нет
- Multiple Choice Questions:: Self-Check TestДокумент2 страницыMultiple Choice Questions:: Self-Check TestCatherine OrdoОценок пока нет
- Joseph Carreon: 3Mt0Ssuof Pomaansoernch Rehf2U0A2God0FДокумент2 страницыJoseph Carreon: 3Mt0Ssuof Pomaansoernch Rehf2U0A2God0FBergonsolutions Aingel100% (1)
- Cwap-402 (2016) PDFДокумент620 страницCwap-402 (2016) PDFFunnyjohn007100% (3)
- Sessi 2 RTU TNBДокумент62 страницыSessi 2 RTU TNBAzree Mohd NoorОценок пока нет
- D64254GC11 Les01Документ15 страницD64254GC11 Les01Eric AlbertoОценок пока нет
- Waybill No. Shipping Date Pickup Courier Pickup Time Origin BranchДокумент22 страницыWaybill No. Shipping Date Pickup Courier Pickup Time Origin BranchTH 13 NganjukОценок пока нет
- Restart Class 4 Term 2Документ2 страницыRestart Class 4 Term 2sebastinОценок пока нет
- VRV AHU System: Standard Series Ahur-Cavj/Davj/Dabvj Outdoor Air Series Ahur-Calj/Dalj/DabljДокумент20 страницVRV AHU System: Standard Series Ahur-Cavj/Davj/Dabvj Outdoor Air Series Ahur-Calj/Dalj/DabljPatrick SyОценок пока нет
- NETA - 21 Remote Monitoring Tool - UM - E - A4Документ196 страницNETA - 21 Remote Monitoring Tool - UM - E - A4Sanu YoОценок пока нет
- Young InventorsДокумент6 страницYoung Inventorsaa proОценок пока нет
- Hydroblaster HPC30Документ2 страницыHydroblaster HPC30sasha marinovОценок пока нет
- GDELT Event - Codebook V2.0 PDFДокумент11 страницGDELT Event - Codebook V2.0 PDFMuhamad MustainОценок пока нет
- Question Bank: Microprocessor and Interfacing (BECE1-517)Документ4 страницыQuestion Bank: Microprocessor and Interfacing (BECE1-517)Dr. Shafiulla Basha ShaikОценок пока нет
- Price List: Small Pump Business Industry SectorДокумент23 страницыPrice List: Small Pump Business Industry Sectorasdjhfkadhf100% (1)
- SLX 9540 Switch Data SheetДокумент8 страницSLX 9540 Switch Data SheetKharisma MuhammadОценок пока нет
- Pamantasan NG Lungsod NG Pasig: - MULTIPLE CHOICE (20 Points)Документ4 страницыPamantasan NG Lungsod NG Pasig: - MULTIPLE CHOICE (20 Points)RogelynCodillaОценок пока нет
- OD04H DatasheetДокумент5 страницOD04H DatasheetThan Htun OoОценок пока нет
- Penerapan Teknik Layanan Konseling Perorangan Oleh Guru BK DangДокумент9 страницPenerapan Teknik Layanan Konseling Perorangan Oleh Guru BK DangSiti nur ArisahОценок пока нет
- Strand Century Lighting Saf-T-Patch Patch Panel Free-Standing Desk Spec Sheet 6-77Документ2 страницыStrand Century Lighting Saf-T-Patch Patch Panel Free-Standing Desk Spec Sheet 6-77Alan MastersОценок пока нет
- Road SafteyДокумент39 страницRoad Safteysai ramanaОценок пока нет
- Openpyxl PDFДокумент125 страницOpenpyxl PDFKumar RahulОценок пока нет
- Surveying Fundamentals and Practices: Seventh EditionДокумент40 страницSurveying Fundamentals and Practices: Seventh EditionFawzia HassanОценок пока нет
- Final Mba HR Payroll ProjectДокумент74 страницыFinal Mba HR Payroll Projectdeepti singhalОценок пока нет