Вам также может понравиться
- SAP Group Reporting 1909Документ28 страницSAP Group Reporting 1909SUDIPTADATTARAY86% (7)
- WebpdfДокумент276 страницWebpdfprateekvОценок пока нет
- Chapter 5 Image Restoration - 01Документ37 страницChapter 5 Image Restoration - 01Aman Ahmad SiddiqueeОценок пока нет
- Ultimate Electronics - Book - CircuitLabДокумент3 страницыUltimate Electronics - Book - CircuitLabEldon50% (2)
- 50+ MATLAB Projects For Engineering StudentsДокумент5 страниц50+ MATLAB Projects For Engineering StudentsaamyaОценок пока нет
- Digital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image ProcessingДокумент35 страницDigital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image Processingsrinivas CVОценок пока нет
- ECE 468: Digital Image Processing: Prof. Sinisa Todorovic Sinisa@eecs - Oregonstate.eduДокумент36 страницECE 468: Digital Image Processing: Prof. Sinisa Todorovic Sinisa@eecs - Oregonstate.eduWikiОценок пока нет
- DIP Chap 4 (Filtering in The Frequency Domain) Lect 11Документ45 страницDIP Chap 4 (Filtering in The Frequency Domain) Lect 11kandeelllОценок пока нет
- Unit - 2 - Part IIIДокумент63 страницыUnit - 2 - Part IIIkrishna chaitanyaОценок пока нет
- 12 RRY025 07 Jan 2020material - II - 07 Jan 2020 - Probf08.solДокумент6 страниц12 RRY025 07 Jan 2020material - II - 07 Jan 2020 - Probf08.solSrirakesh TulabandulaОценок пока нет
- Frequency Domain FiltersДокумент43 страницыFrequency Domain FiltersRakesh InaniОценок пока нет
- Frequeny Domain FilteringДокумент48 страницFrequeny Domain FilteringabcОценок пока нет
- Image Restoration: B14 Image Analysis Michaelmas 2014 A. Zisserman - Image DegradationsДокумент48 страницImage Restoration: B14 Image Analysis Michaelmas 2014 A. Zisserman - Image DegradationsybОценок пока нет
- Digital Image Processing (Chapter 4)Документ62 страницыDigital Image Processing (Chapter 4)Md.Nazmul Abdal Shourov100% (1)
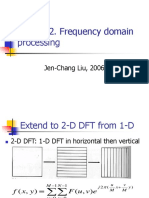
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Документ51 страницаChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirОценок пока нет
- Image Filtering - 2Документ59 страницImage Filtering - 2Jani Saida ShaikОценок пока нет
- Image Enhancement in The Frequency Domain: GZ Chapter 4Документ66 страницImage Enhancement in The Frequency Domain: GZ Chapter 4Shabrin AhammedОценок пока нет
- Filtering in The Frequency DomainДокумент35 страницFiltering in The Frequency DomainKarthikeyaОценок пока нет
- Image RestorationДокумент70 страницImage RestorationJoelОценок пока нет
- Image Enhancement in The Frequency DomainДокумент43 страницыImage Enhancement in The Frequency Domainmusicstand29Оценок пока нет
- Digital Video: Progressive Scanning: One Full Frame Every 1/30th of A SecondДокумент12 страницDigital Video: Progressive Scanning: One Full Frame Every 1/30th of A Secondsandipprmar007Оценок пока нет
- Frequency Domain Filtering Image ProcessingДокумент24 страницыFrequency Domain Filtering Image ProcessingSankalp_Kallakur_402100% (1)
- L19 - Image Restoration IДокумент30 страницL19 - Image Restoration IramadeviОценок пока нет
- Lec-2 Image Enhancement in The Frequency DomainДокумент74 страницыLec-2 Image Enhancement in The Frequency DomainravibabukancharlaОценок пока нет
- Fourier Transforms For DIPДокумент40 страницFourier Transforms For DIPAllanki Sanyasi RaoОценок пока нет
- Smoothing Frequency Domain FiltersДокумент22 страницыSmoothing Frequency Domain FiltersRaymond PraveenОценок пока нет
- Digital Image ProcessingДокумент2 страницыDigital Image ProcessingGeremu TilahunОценок пока нет
- Image Enhancement in The Frequency Domain: GZ Chapter 4Документ66 страницImage Enhancement in The Frequency Domain: GZ Chapter 4ITTAPPA HATTIMANIОценок пока нет
- Image Restoration: Noise Removal Using Frequency Domain FiltersДокумент32 страницыImage Restoration: Noise Removal Using Frequency Domain FiltersDuaa HusseinОценок пока нет
- Unit 2 (B)Документ72 страницыUnit 2 (B)Basavaraj ShellikeriОценок пока нет
- L-11 (Digital ImageProcessing-Image Enhancement in Frequency Domain)Документ69 страницL-11 (Digital ImageProcessing-Image Enhancement in Frequency Domain)career Point BastiОценок пока нет
- The Fourier Transform: Jean Baptiste Joseph FourierДокумент22 страницыThe Fourier Transform: Jean Baptiste Joseph FourierAbhinav_Batish_1810Оценок пока нет
- Module 3 Part CДокумент29 страницModule 3 Part CshivubhavvОценок пока нет
- Image Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallДокумент72 страницыImage Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallBEN AMARОценок пока нет
- WINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-IДокумент35 страницWINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-Ipadm kesavОценок пока нет
- Frequency Domain Filtering (Chapter 4) : CS474/674 - Prof. BebisДокумент59 страницFrequency Domain Filtering (Chapter 4) : CS474/674 - Prof. BebisMohammed AL-MaaitahОценок пока нет
- n-1 n-1 -j2πnk/N n=0: Explain the Properties of 2D discrete Fourier Transform 1. SeparabilityДокумент7 страницn-1 n-1 -j2πnk/N n=0: Explain the Properties of 2D discrete Fourier Transform 1. SeparabilityArun EceОценок пока нет
- Module 3 2 DZRkw8i1IXДокумент72 страницыModule 3 2 DZRkw8i1IXAEC OFFICIALОценок пока нет
- Image Enhancement - Frequency DomainДокумент33 страницыImage Enhancement - Frequency DomainKani MozhiОценок пока нет
- Lec7 FIRdesign 01Документ36 страницLec7 FIRdesign 01Nguyên HopeОценок пока нет
- UNIT - 7: FIR Filter Design: Dr. Manjunatha. P Professor Dept. of ECEДокумент94 страницыUNIT - 7: FIR Filter Design: Dr. Manjunatha. P Professor Dept. of ECEBala MuruganОценок пока нет
- Filtering in Frequency Domain1Документ62 страницыFiltering in Frequency Domain1nandkishor joshiОценок пока нет
- Finite Impulse Response (FIR) Digital FiltersДокумент27 страницFinite Impulse Response (FIR) Digital FiltersSRОценок пока нет
- Experiment - 3Документ13 страницExperiment - 3Veda Vyas PotnuruОценок пока нет
- Frequency DomainДокумент71 страницаFrequency Domainsanju_arora19Оценок пока нет
- Filtering in The Frequency DomainДокумент34 страницыFiltering in The Frequency DomainK.R.Raguram100% (1)
- Asad 1Документ61 страницаAsad 1Abu Bakar SiddiqueОценок пока нет
- EEN 725 Advanced Digital Signal ProcessingДокумент29 страницEEN 725 Advanced Digital Signal ProcessingSaad RashidОценок пока нет
- Image Processing FrequencyДокумент55 страницImage Processing FrequencyAhmed NadyОценок пока нет
- Digital Image ProcessingДокумент94 страницыDigital Image Processinggirithik14Оценок пока нет
- Restoration: 2007 Theo Schouten 1Документ20 страницRestoration: 2007 Theo Schouten 1Fatoma ElamoraОценок пока нет
- PS403 - Digital Signal Processing: 5. DSP - Non-Recursive (FIR) Digital FiltersДокумент51 страницаPS403 - Digital Signal Processing: 5. DSP - Non-Recursive (FIR) Digital FiltersdumbabubuОценок пока нет
- Fourier Transform 2DДокумент58 страницFourier Transform 2DPhi Mac100% (2)
- Lecture 5Документ39 страницLecture 5bedline.salesОценок пока нет
- Almost Equiripple FIR Half-Band Filters: Abstract-Based On Chebyshev Polynomials A Novel Analytical DesignДокумент5 страницAlmost Equiripple FIR Half-Band Filters: Abstract-Based On Chebyshev Polynomials A Novel Analytical DesignShaliniRameshОценок пока нет
- Image Restoration II & Morphological Processing: Comp344 Tutorial Kai ZhangДокумент20 страницImage Restoration II & Morphological Processing: Comp344 Tutorial Kai Zhangtigoldo2008Оценок пока нет
- Chapter 5Документ49 страницChapter 5SunnyОценок пока нет
- Group 2 Members Hcse422 Image Processing and Machine Vision:Image RestorationДокумент38 страницGroup 2 Members Hcse422 Image Processing and Machine Vision:Image RestorationPrayerОценок пока нет
- Chapter 04Документ72 страницыChapter 04shvdoОценок пока нет
- Image ProcessingДокумент17 страницImage ProcessingManjeet MrinalОценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64От EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Оценок пока нет
- Chpater 6Документ3 страницыChpater 6Agatha AstriseleОценок пока нет
- SpatstatДокумент75 страницSpatstatAgatha AstriseleОценок пока нет
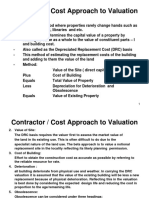
- ValuationДокумент220 страницValuationmojoduomoОценок пока нет
- Peserta LelangДокумент1 страницаPeserta LelangAgatha AstriseleОценок пока нет
- Review of Image Enhancement-839Документ7 страницReview of Image Enhancement-839Agatha AstriseleОценок пока нет
- Resont50 P Product Description v1 0Документ22 страницыResont50 P Product Description v1 0Agatha AstriseleОценок пока нет
- Compound CurvesДокумент8 страницCompound CurvesAgatha AstriseleОценок пока нет
- Sistem KoordinatДокумент38 страницSistem KoordinatAgatha AstriseleОценок пока нет
- SynderДокумент24 страницыSyndergeygey_ro8571Оценок пока нет
- X3DДокумент12 страницX3DSaputra YudaОценок пока нет
- MeritocracyДокумент10 страницMeritocracyAgatha AstriseleОценок пока нет
- Research 9: Activity 4: Background of The StudyДокумент7 страницResearch 9: Activity 4: Background of The StudyPhilip AmelingОценок пока нет
- Engine Torque Settings and Spec's 3.0L V6 SCДокумент4 страницыEngine Torque Settings and Spec's 3.0L V6 SCMario MaravillaОценок пока нет
- Ut 621024Документ14 страницUt 621024DarleiDuarteОценок пока нет
- Nokia 2690 RM-635 Service ManualДокумент18 страницNokia 2690 RM-635 Service ManualEdgar Jose Aranguibel MorilloОценок пока нет
- A Brief Tutorial On Studio MonitorsДокумент18 страницA Brief Tutorial On Studio MonitorsCurtis O'BrienОценок пока нет
- Occupational Therapy Examination Review Guide 4th Edition Ebook PDFДокумент57 страницOccupational Therapy Examination Review Guide 4th Edition Ebook PDFrobert.campbell485Оценок пока нет
- Effect of Liquidity Risk On Performance of Deposit Money Banks in NigeriaДокумент6 страницEffect of Liquidity Risk On Performance of Deposit Money Banks in NigeriaEditor IJTSRDОценок пока нет
- Inglês - Degrees of ComparisonДокумент4 страницыInglês - Degrees of ComparisonVersehgi IIОценок пока нет
- ENGLISH TOEFL Structure (3rd Exercise)Документ5 страницENGLISH TOEFL Structure (3rd Exercise)susannnnnnОценок пока нет
- Olympiad Problem 2Документ3 страницыOlympiad Problem 2Đạt Nguyễn BáОценок пока нет
- Compressor-Less: Historical ApplicationsДокумент70 страницCompressor-Less: Historical Applicationssuryakantshrotriya100% (1)
- Structure and Operation: 3. Electronic Control Unit Connection DiagramДокумент16 страницStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min MyanmarОценок пока нет
- Conceptualizing On Structure Functionalism and Its Applications On Patriotism Study During Covid-19 Pandemic in MalaysiaДокумент7 страницConceptualizing On Structure Functionalism and Its Applications On Patriotism Study During Covid-19 Pandemic in MalaysiaMuhammadSyaqirAimanОценок пока нет
- NEC G266 Quick Reference GuideДокумент3 страницыNEC G266 Quick Reference GuideIonut Gabriel DascaluОценок пока нет
- BM Stake Holders Case Study 1st November 2023Документ2 страницыBM Stake Holders Case Study 1st November 2023Arsath malik ArsathОценок пока нет
- KP For RamДокумент23 страницыKP For RamMonu NarwarОценок пока нет
- Kick-Ass Customer Service-Part 1Документ3 страницыKick-Ass Customer Service-Part 1Mahfuzul Haque SujanОценок пока нет
- PTN Guide Compilation by EmeraldchowДокумент24 страницыPTN Guide Compilation by EmeraldchowMirzaОценок пока нет
- MHSS ItalyДокумент9 страницMHSS Italyromedic36Оценок пока нет
- Chess AI: Competing Paradigms For Machine Intelligence: Shiva Maharaj Nick Polson Alex TurkДокумент15 страницChess AI: Competing Paradigms For Machine Intelligence: Shiva Maharaj Nick Polson Alex TurkDomingo IslasОценок пока нет
- Mech Syllabus R-2017 - 1Документ110 страницMech Syllabus R-2017 - 1goujjОценок пока нет
- Online Preboard Math PDFДокумент4 страницыOnline Preboard Math PDFmarkos0% (1)
- Steam TableДокумент3 страницыSteam TableMUHAMAD SAUKIОценок пока нет
- PienaДокумент1 страницаPienaMika Flores PedroОценок пока нет
- THE INDIAN NAVY - Artificer Apprentice & Senior Secondary Recruit PDFДокумент3 страницыTHE INDIAN NAVY - Artificer Apprentice & Senior Secondary Recruit PDFUjjwalОценок пока нет
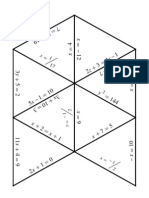
- Algebra1 Review PuzzleДокумент3 страницыAlgebra1 Review PuzzleNicholas Yates100% (1)