Вам также может понравиться
- Lec23 3 PDFДокумент8 страницLec23 3 PDFDharmendra JainОценок пока нет
- Harmonic Oscillator I: Introduction:) On The Particle VanishesДокумент17 страницHarmonic Oscillator I: Introduction:) On The Particle Vanishespusa123Оценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 34Документ15 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 34Dharmendra JainОценок пока нет
- Lec 28Документ34 страницыLec 28sknlndsaОценок пока нет
- Aero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Документ26 страницAero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Sayan PalОценок пока нет
- Dynamics of MachinesДокумент15 страницDynamics of MachinesIshu GoelОценок пока нет
- Walter Lewin Notes 10Документ18 страницWalter Lewin Notes 10Romesor ApolОценок пока нет
- Dynamics of Physical Systems - Lec02Документ19 страницDynamics of Physical Systems - Lec02rdsrajОценок пока нет
- Vibration and WavesДокумент21 страницаVibration and WavessawseeblindОценок пока нет
- Rotational Motion Engineering Mechanics IIT KanpurДокумент67 страницRotational Motion Engineering Mechanics IIT KanpurNitin SharmaОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 24Документ13 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 24Dharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 06Документ10 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 06Dharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 27Документ17 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 27Dharmendra JainОценок пока нет
- Lecture 15 & 16 Work and EnergyДокумент12 страницLecture 15 & 16 Work and Energyrizal123Оценок пока нет
- Rotational Dynamics I: Angular MomentumДокумент14 страницRotational Dynamics I: Angular Momentumrizal123Оценок пока нет
- Lec 13Документ10 страницLec 13Krishan MeenaОценок пока нет
- Dynamics of MachinesДокумент18 страницDynamics of MachinesIshu GoelОценок пока нет
- Forced Harmonic VibrationsДокумент31 страницаForced Harmonic VibrationsVigil J VijayanОценок пока нет
- Lec31 3 PDFДокумент4 страницыLec31 3 PDFDharmendra JainОценок пока нет
- Harmonic Oscillator II: Damped OscillatorДокумент12 страницHarmonic Oscillator II: Damped Oscillatorpusa123Оценок пока нет
- Linear Momentum: in Classical Mechanics, Momentum Is:: DependДокумент9 страницLinear Momentum: in Classical Mechanics, Momentum Is:: DependTarek MahmudОценок пока нет
- Kinetic Molecular Theory of Gases - PhysicsДокумент17 страницKinetic Molecular Theory of Gases - PhysicssrdjanОценок пока нет
- Lec 22Документ28 страницLec 22Shreyas Gupta 4-Yr B.Tech. Chemical Engg., IIT (BHU) VaranasiОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 04Документ9 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 04Dharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 33Документ9 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 33Dharmendra JainОценок пока нет
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 01 Lecture - 01 Review Vector and Laws of MotionДокумент33 страницыEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 01 Lecture - 01 Review Vector and Laws of Motionlechu-92Оценок пока нет
- Lec18 3 PDFДокумент8 страницLec18 3 PDFDharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 25Документ6 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 25Dharmendra JainОценок пока нет
- Harmonic Oscillator III: Forced OscillationsДокумент12 страницHarmonic Oscillator III: Forced Oscillationspusa123Оценок пока нет
- Chapter-9 Periodic MotionДокумент8 страницChapter-9 Periodic Motion2220678Оценок пока нет
- Lec 3Документ7 страницLec 3tonydisojaОценок пока нет
- Lec 15Документ17 страницLec 15mybestfriendgrewalОценок пока нет
- 3 Lec3Документ18 страниц3 Lec3Shahzaib Anwar OffОценок пока нет
- Inverse Power MethodДокумент16 страницInverse Power MethodDarsHan MoHanОценок пока нет
- Welcome To This Course Physics 1Документ31 страницаWelcome To This Course Physics 1andrewsiby63Оценок пока нет
- Lec 4Документ24 страницыLec 4Priyank SrivastavaОценок пока нет
- Simple Harmonic MotionДокумент7 страницSimple Harmonic MotionSusan K33% (3)
- Lec3 3 PDFДокумент7 страницLec3 3 PDFDharmendra JainОценок пока нет
- Rotational Dynamics II: Rotation About A Fixed AxisДокумент11 страницRotational Dynamics II: Rotation About A Fixed Axisrizal123Оценок пока нет
- Oscillations (Physics Factsheet)Документ24 страницыOscillations (Physics Factsheet)Utsav Dhakal100% (2)
- Dynamics of MachinesДокумент14 страницDynamics of MachinesIshu GoelОценок пока нет
- Lesson 1 Oscillations V 2023Документ13 страницLesson 1 Oscillations V 2023ANGELA DE LEONОценок пока нет
- Lec19 PDFДокумент24 страницыLec19 PDFTesh SiОценок пока нет
- Lec35 PDFДокумент15 страницLec35 PDFmanishОценок пока нет
- 3 Newton's LawsДокумент3 страницы3 Newton's LawsOmar Mostafa Hussien ヅОценок пока нет
- Dynamics of Physical Systems - Lec03Документ18 страницDynamics of Physical Systems - Lec03rdsrajОценок пока нет
- Revision: Previous Lecture Was About Applications of Euler-Lagrange Equations Euler-Lagrange Equations (Different Forms)Документ24 страницыRevision: Previous Lecture Was About Applications of Euler-Lagrange Equations Euler-Lagrange Equations (Different Forms)ediealiОценок пока нет
- Lectures 1&2 Review of The Three Laws of Motion and Vector AlgebraДокумент14 страницLectures 1&2 Review of The Three Laws of Motion and Vector AlgebraSathiyaseelan SubramaniОценок пока нет
- The Connection Between Uniform Circular Motion and SHMДокумент4 страницыThe Connection Between Uniform Circular Motion and SHMMauriceОценок пока нет
- Lecture 1Документ9 страницLecture 1fernando benottiОценок пока нет
- Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1Документ19 страницStructural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1vkagarwaОценок пока нет
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 02 Lecture - 03 FrictionДокумент28 страницEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 02 Lecture - 03 Frictionlechu-92Оценок пока нет
- Classical Mechanics: From Newtonian To Lagrangian FormulationДокумент9 страницClassical Mechanics: From Newtonian To Lagrangian Formulationchirag jainОценок пока нет
- Physics ch5Документ78 страницPhysics ch5amanuel amanОценок пока нет
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleДокумент12 страницTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuОценок пока нет
- Lecture 5Документ9 страницLecture 5ediealiОценок пока нет
- Gyroscopic FuntionsДокумент16 страницGyroscopic FuntionsSubash RajeshОценок пока нет
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurДокумент18 страницComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpurk krishna chaitanyaОценок пока нет
- NoessДокумент7 страницNoessarpita9619080670Оценок пока нет
- Gearbox Assembly PDFДокумент6 страницGearbox Assembly PDFDharmendra JainОценок пока нет
- PistonsДокумент59 страницPistonsDharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 33Документ9 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 33Dharmendra JainОценок пока нет
- c1Документ17 страницc1sagar sutarОценок пока нет
- Gearbox Assembly PDFДокумент6 страницGearbox Assembly PDFDharmendra JainОценок пока нет
- Laboratory-Based Innovative Approaches For Competence Development PDFДокумент8 страницLaboratory-Based Innovative Approaches For Competence Development PDFDharmendra JainОценок пока нет
- Lec29 3 PDFДокумент7 страницLec29 3 PDFDharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 27Документ17 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 27Dharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 28Документ10 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 28Dharmendra JainОценок пока нет
- Lec30 3 PDFДокумент8 страницLec30 3 PDFDharmendra JainОценок пока нет
- Lec32 3 PDFДокумент6 страницLec32 3 PDFDharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 24Документ13 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 24Dharmendra JainОценок пока нет
- Lec26 3 PDFДокумент8 страницLec26 3 PDFDharmendra JainОценок пока нет
- Lec19 3 PDFДокумент6 страницLec19 3 PDFDharmendra JainОценок пока нет
- Lec31 3 PDFДокумент4 страницыLec31 3 PDFDharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 25Документ6 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 25Dharmendra JainОценок пока нет
- Lec21 3 PDFДокумент11 страницLec21 3 PDFDharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 20Документ8 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 20Dharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 17Документ12 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 17Dharmendra JainОценок пока нет
- Lec16 3 PDFДокумент11 страницLec16 3 PDFDharmendra JainОценок пока нет
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 22Документ8 страницStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 22Dharmendra JainОценок пока нет
- Lec18 3 PDFДокумент8 страницLec18 3 PDFDharmendra JainОценок пока нет
- Statics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 12 Statics - 2.8Документ18 страницStatics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 12 Statics - 2.8Dharmendra JainОценок пока нет
- Statics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 15 Statics - 5.1Документ10 страницStatics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 15 Statics - 5.1Dharmendra JainОценок пока нет
- Lec14 4 PDFДокумент13 страницLec14 4 PDFDharmendra JainОценок пока нет
- Statics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 13 Statics - 2.9Документ18 страницStatics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 13 Statics - 2.9Dharmendra JainОценок пока нет
- Statics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 10 Statics - 2.4Документ12 страницStatics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 10 Statics - 2.4Dharmendra JainОценок пока нет
- Physics QuestionsДокумент6 страницPhysics QuestionsUswa ChОценок пока нет
- Parul University: Subject: PHYSICS Semester: I - Academic Year 2017-18Документ1 страницаParul University: Subject: PHYSICS Semester: I - Academic Year 2017-18Trilok AkhaniОценок пока нет
- Balance Quality Requirements of Rigid Rotors - The Practical Application of ISO 1940-1Документ11 страницBalance Quality Requirements of Rigid Rotors - The Practical Application of ISO 1940-1FabbroxОценок пока нет
- CH 7 System of ParticlesДокумент25 страницCH 7 System of ParticlesazeenОценок пока нет
- Purchasing and Supply Management 14Th Edition Johnson Solutions Manual Full Chapter PDFДокумент34 страницыPurchasing and Supply Management 14Th Edition Johnson Solutions Manual Full Chapter PDFkennethwolfeycqrzmaobe100% (8)
- Shaking Moment Cancellation of Self Balanced Slider Crank Mechanical Systems by Means of Optimum Mass RedistributionДокумент5 страницShaking Moment Cancellation of Self Balanced Slider Crank Mechanical Systems by Means of Optimum Mass RedistributionFlamez_02Оценок пока нет
- Part 23 Airworthiness Standards - Landing Gear - Amdt 48Документ12 страницPart 23 Airworthiness Standards - Landing Gear - Amdt 48tdfsksОценок пока нет
- Engineering Mechanics: Dynamics: Solutions ManualДокумент191 страницаEngineering Mechanics: Dynamics: Solutions Manualtthgr8 sОценок пока нет
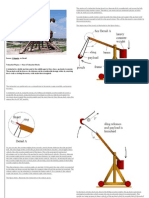
- Trebuchet PhysicsДокумент9 страницTrebuchet PhysicsPedro GuilhermeОценок пока нет
- Finite Element Analysis of Hospital BEDДокумент10 страницFinite Element Analysis of Hospital BEDG SATHVIKОценок пока нет
- Center of Gravity PDFДокумент46 страницCenter of Gravity PDFHumayun MaqboolОценок пока нет
- 100 MMДокумент16 страниц100 MMdesign drawingОценок пока нет
- Circus-Trick Science - How To Balance Anything - Science ProjectДокумент12 страницCircus-Trick Science - How To Balance Anything - Science ProjectjimenaОценок пока нет
- Center of GravityДокумент7 страницCenter of Gravityحنان أحمدОценок пока нет
- Center of Gravity: Hamilton & Luttgens Chapter 14Документ42 страницыCenter of Gravity: Hamilton & Luttgens Chapter 14Md Sharif KhanОценок пока нет
- Crane Report 2Документ19 страницCrane Report 2api-592105594Оценок пока нет
- The Physics of Gymnastics Research PaperДокумент4 страницыThe Physics of Gymnastics Research Paperuziianwgf100% (1)
- The Awesome Life Force 1984Документ8 страницThe Awesome Life Force 1984Roman PetersonОценок пока нет
- Unit 1 Chapter 2 & 3 - Vectors and ProjectileДокумент16 страницUnit 1 Chapter 2 & 3 - Vectors and ProjectileFatimah AfzalОценок пока нет
- Chapter 6 Equilibrium of A Rigid BodyДокумент54 страницыChapter 6 Equilibrium of A Rigid BodyRyan Philip CatapangОценок пока нет
- Biology (BOTANY & ZOOLOGY) : Unit: 1 Diversity in Living WorldДокумент13 страницBiology (BOTANY & ZOOLOGY) : Unit: 1 Diversity in Living WorldnikitagoswamiОценок пока нет
- Solving FSI Solving FSI Applications Using ANSYS Mechanical and CFXДокумент26 страницSolving FSI Solving FSI Applications Using ANSYS Mechanical and CFXRajeuv GovindanОценок пока нет
- Rigid Bodies, Statics, Mechanics Notes From A-Level MathsTutorДокумент9 страницRigid Bodies, Statics, Mechanics Notes From A-Level MathsTutorA-level Maths Tutor100% (3)
- Eduwaves360-Centre of Mass - Momentum - 2018Документ49 страницEduwaves360-Centre of Mass - Momentum - 2018Beyond ur imaginationОценок пока нет
- Tutorial CH9Документ4 страницыTutorial CH9WinxTynix 8000Оценок пока нет
- Tutorial 8 - Newton-Euler EquationsДокумент2 страницыTutorial 8 - Newton-Euler EquationsDuc NguyenОценок пока нет
- Center of GravityДокумент7 страницCenter of GravityAnonymous QiMB2lBCJLОценок пока нет
- 1 2 11a P GliderdesignreportДокумент2 страницы1 2 11a P Gliderdesignreportapi-264092119Оценок пока нет
- Engineering Mechanics Lab ManualДокумент34 страницыEngineering Mechanics Lab ManualMr. Danish SaeedОценок пока нет
- DOM GTU Study Material E-Notes Unit-1 19012021041014AMДокумент12 страницDOM GTU Study Material E-Notes Unit-1 19012021041014AMAman M BanugariyaОценок пока нет