Вам также может понравиться
- Sample Questions: 1 Midterm PracticeДокумент6 страницSample Questions: 1 Midterm PracticeValdimiro BelezaОценок пока нет
- Ultrasonic Distance Sensor HC-SR04Документ3 страницыUltrasonic Distance Sensor HC-SR04Ghigoarta Sergiu Daniel100% (2)
- LCD HandshakingДокумент19 страницLCD HandshakingNvskinId100% (1)
- HBridgeMotorControl With PICДокумент11 страницHBridgeMotorControl With PICcoceicr100% (3)
- Ultrasonic Distance Measurement: Sample Arduino CodeДокумент3 страницыUltrasonic Distance Measurement: Sample Arduino Codegastronomica100% (3)
- RS-232, RS-422, RS-485 Serial Communication General ConceptsДокумент7 страницRS-232, RS-422, RS-485 Serial Communication General ConceptsVidhya Dharan100% (1)
- Agribot Project PresentationДокумент21 страницаAgribot Project Presentationumaiya1990100% (1)
- LED Moving Message Diaply Using PIC16f628 CD4017 and 74LS595Документ5 страницLED Moving Message Diaply Using PIC16f628 CD4017 and 74LS595murugaraj19822100% (1)
- Distance CounterДокумент4 страницыDistance Counterkvamsee112100% (1)
- PIC PPT 13104022 (4th Year)Документ41 страницаPIC PPT 13104022 (4th Year)Daman Deep Singh100% (1)
- Comparison of Communication ProtocolДокумент2 страницыComparison of Communication Protocolvigneshwaran100% (2)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionДокумент5 страницInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
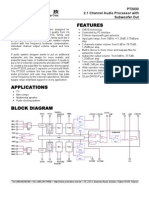
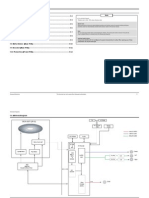
- PT2313L PDFДокумент3 страницыPT2313L PDFMaugrys Castillo100% (1)
- 001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Документ57 страниц001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Arturo Picolin100% (1)
- Lab11 CountersДокумент6 страницLab11 Countersjocansino4496100% (1)
- CCP PWMДокумент19 страницCCP PWMalaa_saq100% (1)
- Capacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb2021Документ2 страницыCapacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb20214NM20EE085 VISHWAKEERTHI BHAT M100% (1)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishДокумент28 страницAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Nec Ir For PicДокумент14 страницNec Ir For Picsudhakar5472100% (1)
- Ultrasonic Based Distance Measurement SystemДокумент18 страницUltrasonic Based Distance Measurement SystemAman100% (2)
- PT2314Документ4 страницыPT2314Yamir Sandoval100% (1)
- Datasheet Sen23292pДокумент15 страницDatasheet Sen23292pjessie100% (1)
- PT2033Документ5 страницPT2033mite100% (1)
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Документ7 страницHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Bascom and AVR, RS-232Документ10 страницBascom and AVR, RS-232akbar100% (1)
- ZadatciДокумент22 страницыZadatciTakticar100% (1)
- L11 NotesДокумент4 страницыL11 NotesRichin Varghese100% (1)
- Easypic v7 Manual v104cДокумент38 страницEasypic v7 Manual v104cjuan0537100% (1)
- LCD Code For AvrДокумент4 страницыLCD Code For AvrAadhya Suman100% (1)
- Brushless DC Electric Motor Control by CPLDДокумент6 страницBrushless DC Electric Motor Control by CPLDIonela100% (3)
- Schematic Diagrams: Special NoteДокумент12 страницSchematic Diagrams: Special NoteAlexandre S. Corrêa100% (1)
- Moving Up To ARMДокумент128 страницMoving Up To ARMlilianfis100% (1)
- HC SR04 PDFДокумент3 страницыHC SR04 PDFVipan Sharma100% (1)
- High Voltage Power Operational Amplifiers: Features DescriptionДокумент6 страницHigh Voltage Power Operational Amplifiers: Features DescriptionWaqas Ayub100% (1)
- Eeeb371 Pic Exp6newДокумент7 страницEeeb371 Pic Exp6newSalemAbaad100% (2)
- Contador Frecuencia 1-50Документ4 страницыContador Frecuencia 1-50jose100% (2)
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFДокумент14 страницIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- An-960 RS 485 Incl Termination DetailsДокумент12 страницAn-960 RS 485 Incl Termination Detailsqafqgibsonq4543100% (1)
- LCD - GDM1602BДокумент10 страницLCD - GDM1602BElanio Julio100% (1)
- Lab LCDДокумент6 страницLab LCDJesus Cotrina100% (1)
- Sound Sensor Module PDFДокумент5 страницSound Sensor Module PDFTrần Thảo Nguyên100% (1)
- Rc2004a Biw EsxДокумент22 страницыRc2004a Biw EsxMarin Baiasu100% (1)
- Embeddded Pic 18f Starter KitДокумент3 страницыEmbeddded Pic 18f Starter KitEmblitz Rajajinagar100% (1)
- Introduction I2c and SPIДокумент14 страницIntroduction I2c and SPIHaris Jeelani100% (1)
- Testing Pic Code For I2C Master - Slave CommunicationДокумент15 страницTesting Pic Code For I2C Master - Slave CommunicationJavier Corimaya33% (3)
- DIY Electronics (HK) LTD PO Box 88458, Sham Shui Po, Hong KongДокумент17 страницDIY Electronics (HK) LTD PO Box 88458, Sham Shui Po, Hong Kongrajudp100% (1)
- Aoc 2436saДокумент45 страницAoc 2436saatomo33100% (1)
- Ladder Logic For PIC and AVRДокумент6 страницLadder Logic For PIC and AVRTomás Totaro100% (1)
- Sg8V1 Programing Schematic: IC Design Research & Education CenterДокумент1 страницаSg8V1 Programing Schematic: IC Design Research & Education CenterKit Vi Điều Khiển100% (1)
- USB Programátor Pro Atmel: +5V Vccint 1k 1k +5V +5V JP2 R2 R3Документ1 страницаUSB Programátor Pro Atmel: +5V Vccint 1k 1k +5V +5V JP2 R2 R3Nacer Mezghiche100% (1)
- LCD 16x2Документ6 страницLCD 16x2teguh iman100% (2)
- Assembly Programming Journal 3Документ55 страницAssembly Programming Journal 3AmineBenali100% (2)
- Ultrasonic Range Finder Using 8051Документ6 страницUltrasonic Range Finder Using 8051Jason Hendricks100% (3)
- Proj 4Документ4 страницыProj 4xyzОценок пока нет
- Proj RДокумент4 страницыProj RxyzОценок пока нет
- BESTSENSORPROGRAMMINGДокумент6 страницBESTSENSORPROGRAMMINGChickinОценок пока нет
- Working With Ultrasonic Sensor Using Arduino BoardДокумент6 страницWorking With Ultrasonic Sensor Using Arduino BoardDaniel Evans100% (2)
- PING) ) ) Ultrasonic Distance Sensor: Onic P Ressu Re Wa Ves Ping) ) ) SP EakerДокумент6 страницPING) ) ) Ultrasonic Distance Sensor: Onic P Ressu Re Wa Ves Ping) ) ) SP EakerWafa'a S. Al-HawajrehОценок пока нет
- Arduino and HC-SR04 Ultrasonic SensorДокумент11 страницArduino and HC-SR04 Ultrasonic SensorVarli ArsolОценок пока нет
- Automation Code-1Документ5 страницAutomation Code-1api-594759083Оценок пока нет
- Sensor PingДокумент17 страницSensor Pingjoseluisbb_87504100% (1)
- Check To Make Sure You Have The Most Recent Set of AWS Simple Icons Creating DiagramsДокумент48 страницCheck To Make Sure You Have The Most Recent Set of AWS Simple Icons Creating DiagramsarunchockanОценок пока нет
- Pre-Colonial Philippine ArtДокумент5 страницPre-Colonial Philippine Artpaulinavera100% (5)
- KC CVДокумент2 страницыKC CVVishal KeshriОценок пока нет
- How To Deliver A Good PresentationДокумент9 страницHow To Deliver A Good PresentationGhozi Fawwaz Imtiyaazi LabiibaОценок пока нет
- Mastering The Art of Self Hypnosis: by Dr. Kenneth GrossmanДокумент46 страницMastering The Art of Self Hypnosis: by Dr. Kenneth GrossmanguilhermeosirisОценок пока нет
- Muscular System NotesДокумент6 страницMuscular System NotesZussette Corbita VingcoОценок пока нет
- Effect of Different Laser Texture Configurations On Improving Surface Wettability and Wear Characteristics of Ti6Al4V Implant MaterialДокумент14 страницEffect of Different Laser Texture Configurations On Improving Surface Wettability and Wear Characteristics of Ti6Al4V Implant Materialnitish kumar100% (1)
- InvoiceДокумент1 страницаInvoiceKidambi SureshОценок пока нет
- IDR PresentationДокумент11 страницIDR Presentationparthesh laheriОценок пока нет
- Linberg V MakatiДокумент2 страницыLinberg V MakatiChimney sweepОценок пока нет
- Monster Energy v. Jing - Counterfeit OpinionДокумент9 страницMonster Energy v. Jing - Counterfeit OpinionMark JaffeОценок пока нет
- Cognitive InfocommunicationsДокумент229 страницCognitive Infocommunicationsradhakodirekka8732Оценок пока нет
- World War 1 NotesДокумент2 страницыWorld War 1 NotesSoarSZNОценок пока нет
- Problem Sheet 3 - External Forced Convection - WatermarkДокумент2 страницыProblem Sheet 3 - External Forced Convection - WatermarkUzair KhanОценок пока нет
- User Manual of CHISON IVis 60 EXPERT PDFДокумент164 страницыUser Manual of CHISON IVis 60 EXPERT PDFJuan Carlos GoyzuetaОценок пока нет
- InflibnetДокумент3 страницыInflibnetSuhotra GuptaОценок пока нет
- Ajol File Journals - 404 - Articles - 66996 - Submission - Proof - 66996 4813 136433 1 10 20110608Документ12 страницAjol File Journals - 404 - Articles - 66996 - Submission - Proof - 66996 4813 136433 1 10 20110608Lovely Joy Hatamosa Verdon-DielОценок пока нет
- Ecological Pyramids WorksheetДокумент3 страницыEcological Pyramids Worksheetapi-26236818833% (3)
- Thesis MaltaДокумент6 страницThesis Maltaaprilwbndsouthbend100% (2)
- Table of SpecificationДокумент2 страницыTable of SpecificationAya AlisasisОценок пока нет
- Service Installation Rules For Connection To Electricity Network (See Chapter 14)Документ83 страницыService Installation Rules For Connection To Electricity Network (See Chapter 14)EduardoMorcilloОценок пока нет
- 3500 Ha027988 7Документ384 страницы3500 Ha027988 7Gigi ZitoОценок пока нет
- SPR, RCS-9627CN, NoДокумент5 страницSPR, RCS-9627CN, NoAmaresh NayakОценок пока нет
- Barclays Personal Savings AccountsДокумент10 страницBarclays Personal Savings AccountsTHОценок пока нет
- Anodizing PDFДокумент12 страницAnodizing PDFsanjay ukalkarОценок пока нет
- Chain Rule 3LNДокумент2 страницыChain Rule 3LNsaad khОценок пока нет
- MOOT 1 (Principal Sir)Документ3 страницыMOOT 1 (Principal Sir)vaibhav jainОценок пока нет
- Entrance 2021: Indira Gandhi Rashtriya Uran AkademiДокумент2 страницыEntrance 2021: Indira Gandhi Rashtriya Uran Akademird meshramОценок пока нет
- OMNI OptixДокумент4 страницыOMNI OptixFelipe MoyaОценок пока нет