Вам также может понравиться
- Diseño de Un Robot Antropomórfico de Propósito GeneralДокумент54 страницыDiseño de Un Robot Antropomórfico de Propósito GeneralFernandoОценок пока нет
- Material Rap 1Документ17 страницMaterial Rap 1Johanna RojasОценок пока нет
- Guía de Actividades y Rubrica de Evaluación - Tarea 4 - Desarrolar Ejercicios Unidad 3Документ26 страницGuía de Actividades y Rubrica de Evaluación - Tarea 4 - Desarrolar Ejercicios Unidad 3Eric AlvarezОценок пока нет
- Estudio de CasoДокумент1 страницаEstudio de CasoYayitaLeonaB.VanegasОценок пока нет
- Expo DiseñoДокумент13 страницExpo DiseñoYayitaLeonaB.VanegasОценок пока нет
- GuiaRAP1 PDFДокумент6 страницGuiaRAP1 PDFAndrés Sierra LombanaОценок пока нет
- AstronautaДокумент1 страницаAstronautaYayitaLeonaB.VanegasОценок пока нет
- PROBLEMA1Документ2 страницыPROBLEMA1YayitaLeonaB.VanegasОценок пока нет
- ANFISДокумент7 страницANFISYayitaLeonaB.VanegasОценок пока нет
- Clasificación de Las Fuentes Del DerechoДокумент7 страницClasificación de Las Fuentes Del DerechoYayitaLeonaB.VanegasОценок пока нет
- La Peña Bolivar Abril 23 de 2018Документ1 страницаLa Peña Bolivar Abril 23 de 2018YayitaLeonaB.VanegasОценок пока нет
- Capacitor EsДокумент93 страницыCapacitor EsKay PlataОценок пока нет
- ACTIVIDAD3Документ3 страницыACTIVIDAD3YayitaLeonaB.VanegasОценок пока нет
- DISEÑO1Документ7 страницDISEÑO1YayitaLeonaB.VanegasОценок пока нет
- Cubeta OndasДокумент8 страницCubeta OndasYayitaLeonaB.VanegasОценок пока нет
- INFORME (Mespeciales)Документ1 страницаINFORME (Mespeciales)YayitaLeonaB.VanegasОценок пока нет
- Acta de Compromiso Del Pacto de ConvivenciaДокумент1 страницаActa de Compromiso Del Pacto de ConvivenciaYayitaLeonaB.Vanegas100% (2)
- DiseñoДокумент10 страницDiseñoYayitaLeonaB.VanegasОценок пока нет
- Expo PRДокумент3 страницыExpo PRYayitaLeonaB.VanegasОценок пока нет
- Pan Tep Roy EctoДокумент19 страницPan Tep Roy EctoYayitaLeonaB.VanegasОценок пока нет
- Ctos Funciones Sinusoidales AdmitenДокумент3 страницыCtos Funciones Sinusoidales AdmitenYayitaLeonaB.VanegasОценок пока нет
- 1 Imprimir FASORES Resumen Funciones Trigonométricas Cto2 PASGДокумент2 страницы1 Imprimir FASORES Resumen Funciones Trigonométricas Cto2 PASGYayitaLeonaB.VanegasОценок пока нет
- Laboratorio Configuración DarlintonДокумент3 страницыLaboratorio Configuración DarlintonYayitaLeonaB.VanegasОценок пока нет
- DISEÑO2CORTE1Документ32 страницыDISEÑO2CORTE1YayitaLeonaB.VanegasОценок пока нет
- Laboratorio de Oscilaciones y OndasДокумент4 страницыLaboratorio de Oscilaciones y OndasYayitaLeonaB.VanegasОценок пока нет
- Clase 20. Arduino SimulinkДокумент9 страницClase 20. Arduino SimulinkYayitaLeonaB.VanegasОценок пока нет
- Tema 4Документ6 страницTema 4YayitaLeonaB.VanegasОценок пока нет
- Tema 07. Interfaz Gráficas de Usuario GuiДокумент11 страницTema 07. Interfaz Gráficas de Usuario GuiYayitaLeonaB.VanegasОценок пока нет
- Clase 16. Introducción ArduinoДокумент13 страницClase 16. Introducción ArduinoYayitaLeonaB.VanegasОценок пока нет
- 1.2 - Estequiometría QuímicaДокумент33 страницы1.2 - Estequiometría QuímicaAlejandro BalladaresОценок пока нет
- El CómputoДокумент5 страницEl CómputoKatelin TurmeroОценок пока нет
- Hager Tarifa 918 Distribución de La Energía y Gestión Del CableadoДокумент400 страницHager Tarifa 918 Distribución de La Energía y Gestión Del CableadoVEMATELОценок пока нет
- Fenomenos de Transporte PresentacionДокумент198 страницFenomenos de Transporte PresentacionDaniela HernándezОценок пока нет
- Sistemas de Instalacion Hilti 2003 PDFДокумент103 страницыSistemas de Instalacion Hilti 2003 PDFdaniel torres100% (1)
- PDF Adjunto Evo Tronic Evo Touch EstandarДокумент30 страницPDF Adjunto Evo Tronic Evo Touch EstandarLuis AguirreОценок пока нет
- Trabajo E060Документ14 страницTrabajo E060CESAR ALEJANDRO RONDON LESCANOОценок пока нет
- Calculo Albañileria ArmadaДокумент68 страницCalculo Albañileria Armadafdiaz12100% (1)
- ICC2104 - Hormigón C3 PDFДокумент37 страницICC2104 - Hormigón C3 PDFjuanОценок пока нет
- Av - Concissa - Flyer de PresentaciónДокумент2 страницыAv - Concissa - Flyer de PresentaciónCésar Fustamante BenavidezОценок пока нет
- LIBRO CimentacionesДокумент9 страницLIBRO CimentacionesrpazbОценок пока нет
- Ejercicios de Representación de S.E.PДокумент4 страницыEjercicios de Representación de S.E.PPablo BmОценок пока нет
- Muro de ContencionДокумент6 страницMuro de ContencionAndres CordobaОценок пока нет
- Lineas de Investicacion UTMACH - CarpioДокумент5 страницLineas de Investicacion UTMACH - CarpioRicardo Carpio JaramilloОценок пока нет
- NTC 1920 PDFДокумент7 страницNTC 1920 PDFKathe Zornosa0% (3)
- CLASE 08 - Diseño Cimientos A TensionДокумент3 страницыCLASE 08 - Diseño Cimientos A Tensionfelipe apolinarОценок пока нет
- Curso Core ToolsДокумент187 страницCurso Core ToolsAleida Campos Luna100% (5)
- Philips Interior OkДокумент12 страницPhilips Interior OkGustavo Stumvoll ZeballosОценок пока нет
- Proyecto FinalДокумент5 страницProyecto FinalMatías CabelloОценок пока нет
- Implantación de Plantas de Procesos Quimicos PDFДокумент8 страницImplantación de Plantas de Procesos Quimicos PDFMaguiОценок пока нет
- Unidad 2 - Tarea 4Документ8 страницUnidad 2 - Tarea 4osmar100% (1)
- Guia 3 ProveedoresДокумент11 страницGuia 3 ProveedoresPablo MacuchapiОценок пока нет
- Trabajo Práctico No 1 - Introducción A La Ingeniería EconómicaДокумент20 страницTrabajo Práctico No 1 - Introducción A La Ingeniería EconómicaErick Xavier SosaОценок пока нет
- 55 Curriculum Vitae IntrepidoДокумент1 страница55 Curriculum Vitae Intrepidojesus chavezОценок пока нет
- Diseño de Puente Viga CajónДокумент44 страницыDiseño de Puente Viga CajónAndreaStefanyaSolanoHernandezОценок пока нет
- Evidencia 2Документ9 страницEvidencia 2Ale LozanoОценок пока нет
- SILABO URP Ic0808-Ingenieria-De-Rios-Y-CostasДокумент6 страницSILABO URP Ic0808-Ingenieria-De-Rios-Y-CostasCARLAОценок пока нет
- Laboratorio de Algebra Lineal - Sist-Ec. - 19-08-2022-2Документ5 страницLaboratorio de Algebra Lineal - Sist-Ec. - 19-08-2022-2Luis HolguinОценок пока нет
- ASTM A792 Galvanizado AluminioДокумент9 страницASTM A792 Galvanizado AluminioALBERTO C100% (1)
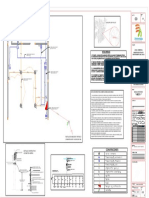
- Plano Eléctrico Local ComercialДокумент1 страницаPlano Eléctrico Local ComercialManuela Antury MОценок пока нет