Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- 5.3.1 Derivation of The Explicit Euler MethodДокумент13 страниц5.3.1 Derivation of The Explicit Euler Methoddeepak pandeyОценок пока нет
- Lecture 14 Absolute AlcoholДокумент5 страницLecture 14 Absolute Alcoholdeepak pandey0% (1)
- Deposit Confirmation/Renewal AdviceДокумент1 страницаDeposit Confirmation/Renewal Advicedeepak pandeyОценок пока нет
- GATE Mathematics Questions All Branch by S K MondalДокумент192 страницыGATE Mathematics Questions All Branch by S K Mondaldeepak pandeyОценок пока нет
- Gama Sir (Iit-Kgp) : Scanned by CamscannerДокумент162 страницыGama Sir (Iit-Kgp) : Scanned by Camscannerdeepak pandeyОценок пока нет
- Information Report: in Respect of Article/Document Lost in Delhi SO No: 430/2014 Delhi PoliceДокумент1 страницаInformation Report: in Respect of Article/Document Lost in Delhi SO No: 430/2014 Delhi Policedeepak pandeyОценок пока нет
- Midsem13 PDFДокумент2 страницыMidsem13 PDFdeepak pandeyОценок пока нет
- Detailed Ad - GATE 2017 - Final 2Документ8 страницDetailed Ad - GATE 2017 - Final 2deepak pandeyОценок пока нет
- Gate 2017 Solutions PDFДокумент17 страницGate 2017 Solutions PDFdeepak pandeyОценок пока нет
- GibbsPhaseRule PDFДокумент2 страницыGibbsPhaseRule PDFdeepak pandeyОценок пока нет
- Gate 2017 Chemical Engineering Complete SolutionsДокумент45 страницGate 2017 Chemical Engineering Complete Solutionsdeepak pandeyОценок пока нет
- BM 1006 Biomedical Sensor Measurement DevicesДокумент4 страницыBM 1006 Biomedical Sensor Measurement Devicesdeepak pandeyОценок пока нет
- BM 1006 Biomedical Sensor Measurement DevicesДокумент4 страницыBM 1006 Biomedical Sensor Measurement Devicesdeepak pandeyОценок пока нет
- Chemical, Biochemical, and Engineering ThermodynamicsДокумент37 страницChemical, Biochemical, and Engineering Thermodynamicsdeepak pandeyОценок пока нет
- Chemical Reaction Engineering (CRE) Is TheДокумент20 страницChemical Reaction Engineering (CRE) Is Thedeepak pandeyОценок пока нет
- Cascade Control: 25.1 Master and Slave LoopsДокумент10 страницCascade Control: 25.1 Master and Slave Loopsdeepak pandeyОценок пока нет
- Profitability Estimates: Dr. M. SubramanianДокумент29 страницProfitability Estimates: Dr. M. Subramaniandeepak pandeyОценок пока нет
- Automatic Shoe PolishДокумент21 страницаAutomatic Shoe PolishDebashishParida100% (2)
- Jameco Part Number 1943385: Distributed byДокумент8 страницJameco Part Number 1943385: Distributed byadrianioantomaОценок пока нет
- 8085 MP ManualДокумент97 страниц8085 MP ManualChintan ShahОценок пока нет
- DP Sound Others 15035 DriversДокумент203 страницыDP Sound Others 15035 DriversJuan Carlos Gonzalez L100% (1)
- DynadockU3.0 RecomendableДокумент86 страницDynadockU3.0 RecomendableArturo Rebolledo RamírezОценок пока нет
- TPC PD-25-XS Power SupplyДокумент4 страницыTPC PD-25-XS Power SupplytoppowerОценок пока нет
- High Conductance Fast Diode: Absolute Maximum Ratings Sym Parameter Value UnitsДокумент2 страницыHigh Conductance Fast Diode: Absolute Maximum Ratings Sym Parameter Value UnitsZoltán ÁgostonОценок пока нет
- EGR260 - Introduction To PSPICEДокумент14 страницEGR260 - Introduction To PSPICEJai BaluniОценок пока нет
- IEEE Access Volume 7 Issue 2019Документ11 страницIEEE Access Volume 7 Issue 2019Bound M DimasОценок пока нет
- Projector EIP-25 Spec 2388Документ1 страницаProjector EIP-25 Spec 2388rama540214Оценок пока нет
- Vor AntennaДокумент82 страницыVor Antennacmge_2005100% (2)
- Remocon LRT 1Документ2 страницыRemocon LRT 1siluma11Оценок пока нет
- Operator Guide: 7133 Models D40 and T40 Serial Disk SystemsДокумент0 страницOperator Guide: 7133 Models D40 and T40 Serial Disk SystemsDao VietОценок пока нет
- Application of S-R Latch - Digital Logic & DesignДокумент13 страницApplication of S-R Latch - Digital Logic & DesignskyviperОценок пока нет
- USB 2.0 Board Design and Layout Guidelines: Application ReportДокумент11 страницUSB 2.0 Board Design and Layout Guidelines: Application Reportkarim salimiОценок пока нет
- LynxДокумент11 страницLynxselfmake1523Оценок пока нет
- LCD TV Repair Guide Handbook - 140211 - v1Документ45 страницLCD TV Repair Guide Handbook - 140211 - v1henry200892% (78)
- Digital Design: Sequential Logic Design - ControllersДокумент58 страницDigital Design: Sequential Logic Design - ControllersAhmad AliОценок пока нет
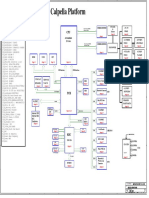
- Msi ms-1681 cr620 SCH PDFДокумент45 страницMsi ms-1681 cr620 SCH PDFkamil_yilmaz_6Оценок пока нет
- IR Senor Obstacle Avoidance Keyes KY 032Документ6 страницIR Senor Obstacle Avoidance Keyes KY 032Andy ZhuОценок пока нет
- YaДокумент134 страницыYaHengkiОценок пока нет
- DevlistДокумент9 страницDevlistHouman JafarniaОценок пока нет
- Introducing The Motorola HC908 MicrocontrollerДокумент26 страницIntroducing The Motorola HC908 Microcontrollervinicius.camattaОценок пока нет
- Basic Arduino WorkshopДокумент34 страницыBasic Arduino WorkshopA Fahrul Aji100% (1)
- FBT Promaxx 14a PDFДокумент2 страницыFBT Promaxx 14a PDFKirt0% (1)
- bq33100 Super Capacitor Pack Manager EVM: User's GuideДокумент4 страницыbq33100 Super Capacitor Pack Manager EVM: User's GuidearturoОценок пока нет
- Design ConventionДокумент35 страницDesign ConventionVivek AgarwalОценок пока нет
- BJT Circuits - Basic Electronics GuideДокумент55 страницBJT Circuits - Basic Electronics GuideNenad Stamenović100% (1)
- Adc 0808Документ10 страницAdc 0808nakranimahender50% (2)
- Solid State Design For The Radio Amateur - 1986Документ256 страницSolid State Design For The Radio Amateur - 1986suzycreamcheeze100% (7)