Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Ingrid Olderock La Mujer de Los Perros by Nancy GuzmnДокумент14 страницIngrid Olderock La Mujer de Los Perros by Nancy GuzmnYuki Hotaru0% (3)
- Optical Fiber Communication 06EC7 2: Citstudents - inДокумент4 страницыOptical Fiber Communication 06EC7 2: Citstudents - inShailaja UdtewarОценок пока нет
- KN3906Документ3 страницыKN3906ingucvОценок пока нет
- Co-Ordinate Measuring Machines & It's Applications: Introduction ToДокумент65 страницCo-Ordinate Measuring Machines & It's Applications: Introduction Toshiva dОценок пока нет
- Priorities For Access To HealthДокумент25 страницPriorities For Access To HealthsvpadillaОценок пока нет
- Felkoder Jeep Grand Cherokee 1993Документ41 страницаFelkoder Jeep Grand Cherokee 19931LEFFEОценок пока нет
- LTS 3000 SpecificationДокумент4 страницыLTS 3000 SpecificationMuhammad Nabil RoslanОценок пока нет
- Et154 PDFДокумент6 страницEt154 PDFbytecОценок пока нет
- Harden's Spices Model For Biochemistry in Medical CurriculumДокумент10 страницHarden's Spices Model For Biochemistry in Medical CurriculumGlobal Research and Development Services100% (1)
- TM 9-792 M21 AMMUNITION TRAILERДокумент128 страницTM 9-792 M21 AMMUNITION TRAILERAdvocate100% (1)
- Hydraulic Vehicle Lift ST List of Parts and Appendices Stertil B.V BДокумент24 страницыHydraulic Vehicle Lift ST List of Parts and Appendices Stertil B.V BOvidiu PopaОценок пока нет
- 009-1137-00 HST-SMRTD Savant Smart Host Tech SpecДокумент6 страниц009-1137-00 HST-SMRTD Savant Smart Host Tech Specferna2420Оценок пока нет
- Plasma TV SMPS TroubleshoutingДокумент5 страницPlasma TV SMPS TroubleshoutingmindjokerОценок пока нет
- Technology Architecture For NginX, postgreSQL, postgRESTДокумент5 страницTechnology Architecture For NginX, postgreSQL, postgRESTkarelvdwalt9366Оценок пока нет
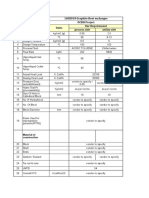
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideДокумент2 страницы16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaОценок пока нет
- Diff BW CBO and RBOДокумент2 страницыDiff BW CBO and RBORamreddy BollaОценок пока нет
- 1169a AopДокумент12 страниц1169a AopBAYARD BernardОценок пока нет
- Electronic Let Off MotionДокумент3 страницыElectronic Let Off MotionWaqar Baloch100% (2)
- Strategic Management: Internal AssessmentДокумент33 страницыStrategic Management: Internal AssessmentSAEID RAHMAN100% (1)
- Maintenance and Repair Instructions TM 124/11: Spring-Applied Sliding Caliper Brake FSG110 With Hub CenteringДокумент11 страницMaintenance and Repair Instructions TM 124/11: Spring-Applied Sliding Caliper Brake FSG110 With Hub CenteringNik100% (1)
- Novel PWM Inverter Strategy For A Inverter Open End Winding Induction MotorДокумент7 страницNovel PWM Inverter Strategy For A Inverter Open End Winding Induction MotorGanesh ChallaОценок пока нет
- Ti 59 - A Note On Battery CorrosionДокумент3 страницыTi 59 - A Note On Battery CorrosionLeon ZieglerОценок пока нет
- Managerial EconomicsДокумент219 страницManagerial Economicsashishpandey1261100% (2)
- LiquidlevelДокумент24 страницыLiquidlevelAnu Raj Anu RajОценок пока нет
- (ENG) C&T Catalog Hydrelio® Technology 2021Документ24 страницы(ENG) C&T Catalog Hydrelio® Technology 2021ReenОценок пока нет
- Sheet 3Документ5 страницSheet 3Yasmin RedaОценок пока нет
- Oracle Linux 6 InstallationДокумент35 страницOracle Linux 6 InstallationendaleОценок пока нет
- Automatic Transmission: Models FA and FB With Allison AT542Документ22 страницыAutomatic Transmission: Models FA and FB With Allison AT542nguyenxuanvinhv3Оценок пока нет
- HILTI Typical Plumbing ApplicationsДокумент140 страницHILTI Typical Plumbing ApplicationskuraimundОценок пока нет
- Chapter 1: INTRODUCTION: 1.1 BackgroundДокумент5 страницChapter 1: INTRODUCTION: 1.1 BackgroundAhsan azizОценок пока нет