Вам также может понравиться
- ELEG 220 (Fall 2020) Project: Title: Howland Circuit (VCCS) Score: / 100Документ2 страницыELEG 220 (Fall 2020) Project: Title: Howland Circuit (VCCS) Score: / 100Lucky Asr AwaisОценок пока нет
- ELEG 413 Spring 2011 Lecture #1Документ42 страницыELEG 413 Spring 2011 Lecture #1Jorge Molina MonsivaisОценок пока нет
- ELEG270 Lecture 13 SE Online-1Документ28 страницELEG270 Lecture 13 SE Online-1Saied Aly SalamahОценок пока нет
- Syllabus ELEG5473 Pow Sys Op & CTRLДокумент3 страницыSyllabus ELEG5473 Pow Sys Op & CTRLDavid ZhongОценок пока нет
- E05 33 11 LV Distribution Power Cables v5Документ77 страницE05 33 11 LV Distribution Power Cables v5Anorld WalkerОценок пока нет
- Weller@eng - Usf.edu: Fundamentals of Applied ElectromagneticsДокумент3 страницыWeller@eng - Usf.edu: Fundamentals of Applied ElectromagneticsNiel NisperosОценок пока нет
- Closed Loop Control of Separately Excited DC MotorДокумент5 страницClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHIОценок пока нет
- EE 353-Electrical Power Systems-Farhan MahmoodДокумент5 страницEE 353-Electrical Power Systems-Farhan MahmoodMuhammad shahbazОценок пока нет
- Outline EE 340 LUMSДокумент4 страницыOutline EE 340 LUMSSalaarОценок пока нет
- Cuckoo Search (CS) Algorithm - Matlab CodeДокумент4 страницыCuckoo Search (CS) Algorithm - Matlab CodeGogyОценок пока нет
- Modular Programme Coursework Assessment Specification: Module DetailsДокумент7 страницModular Programme Coursework Assessment Specification: Module DetailsJohn AssadОценок пока нет
- EEE 2019 Lecture 4Документ30 страницEEE 2019 Lecture 4Emment ChromaОценок пока нет
- LUMS EE - 1st Year Course OutlinesДокумент36 страницLUMS EE - 1st Year Course OutlinesAhsan Ahmed MoinОценок пока нет
- Basic Concept For Electrical DesigningДокумент2 страницыBasic Concept For Electrical DesigningJoel RemegioОценок пока нет
- IEC 62146 Power Capacitors in AC High Volatge CB With 62271-100Документ30 страницIEC 62146 Power Capacitors in AC High Volatge CB With 62271-100Rohit DeraОценок пока нет
- 442 Revised Lab Manual w07Документ51 страница442 Revised Lab Manual w07srinu247Оценок пока нет
- Lahore University of Management Sciences: EE539 - Radar SystemsДокумент3 страницыLahore University of Management Sciences: EE539 - Radar SystemsDr-Raghad Al-FahamОценок пока нет
- E01 33kV and 11 KV Lightning Arresters (1) - 2010Документ12 страницE01 33kV and 11 KV Lightning Arresters (1) - 2010Ashwin RaparthiОценок пока нет
- Diploma ELECTRICAl 6th Sem SylДокумент21 страницаDiploma ELECTRICAl 6th Sem SylAadil Ashraf KhanОценок пока нет
- Competency Assessment Guide Apegs v181Документ68 страницCompetency Assessment Guide Apegs v181sudhirguduruОценок пока нет
- Solutions To Homework 4: Problem 1 (15 Points)Документ15 страницSolutions To Homework 4: Problem 1 (15 Points)joa91189100% (1)
- Review Test Submission - ACK5 - 2016 Fall - ELEN 5324 - 48F.Документ3 страницыReview Test Submission - ACK5 - 2016 Fall - ELEN 5324 - 48F.DarshanRavalОценок пока нет
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Документ7 страницSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajОценок пока нет
- FE Review Dynamics Notes Z ExamplesДокумент7 страницFE Review Dynamics Notes Z ExamplesDan 's Gone100% (2)
- Electronics Measurements and Instrumentation Ebook & NotesДокумент94 страницыElectronics Measurements and Instrumentation Ebook & NotesGunjan JhaОценок пока нет
- Lab 591 - B Analysis and Design of CSДокумент2 страницыLab 591 - B Analysis and Design of CSDevine WriterОценок пока нет
- Rizzoni 5e SM ch03 SolutionДокумент59 страницRizzoni 5e SM ch03 SolutionrhdquddjqОценок пока нет
- EE308 Electric DrivesДокумент2 страницыEE308 Electric DriveselecenggОценок пока нет
- Obe Hec Subject Course Outline BSCS 2015Документ131 страницаObe Hec Subject Course Outline BSCS 2015Muhammad Asim MubarikОценок пока нет
- The University of Lahore, Islamabad Campus Course: Power System Protection Lab Work Sheet 4Документ8 страницThe University of Lahore, Islamabad Campus Course: Power System Protection Lab Work Sheet 4Hayat AnsariОценок пока нет
- Bis-Electrical Code Is - sp.30.2011Документ411 страницBis-Electrical Code Is - sp.30.2011Seema SharmaОценок пока нет
- Designing Over Current Relay Logic in MATLABДокумент4 страницыDesigning Over Current Relay Logic in MATLABAl Imam AkbarОценок пока нет
- RSTU EEE Syllabus With Name VER1Документ32 страницыRSTU EEE Syllabus With Name VER1AhmedEEEОценок пока нет
- Mechatronics SyllabusДокумент41 страницаMechatronics SyllabusElstonD'cruzОценок пока нет
- EE296 Zafra HomeworkДокумент62 страницыEE296 Zafra HomeworkPaolo Josemari ZafraОценок пока нет
- Intro Electric Machines and DrivesДокумент4 страницыIntro Electric Machines and DrivesArmando MaloneОценок пока нет
- The University of Lahore, Islamabad Campus Course: Power System Protection Lab Work Sheet 6Документ7 страницThe University of Lahore, Islamabad Campus Course: Power System Protection Lab Work Sheet 6Hayat AnsariОценок пока нет
- Rr410209 High Voltage EngineeringДокумент6 страницRr410209 High Voltage EngineeringSrinivasa Rao GОценок пока нет
- FE Examples Prob.&Stat. July22 09Документ14 страницFE Examples Prob.&Stat. July22 09Hashem Mohamed HashemОценок пока нет
- Transient Stability Analysis Transient Stability Analysis: by Prof. C. Radhakrishna by Prof. C. RadhakrishnaДокумент32 страницыTransient Stability Analysis Transient Stability Analysis: by Prof. C. Radhakrishna by Prof. C. RadhakrishnaakemaladinОценок пока нет
- Dynamic Analysis of Switching ConvertersДокумент134 страницыDynamic Analysis of Switching ConvertersLisonildoОценок пока нет
- Module Information Module Title Electric Drives and Control Module Code MMD2511Документ4 страницыModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaОценок пока нет
- Haroon Ur Rashid - CV With Photo - Registrar PIEAS 01122019Документ10 страницHaroon Ur Rashid - CV With Photo - Registrar PIEAS 01122019HaroonОценок пока нет
- IC1252Документ0 страницIC1252Eugin RajОценок пока нет
- The Copperbelt University School of Mathematics and Natural Sciences Department of Physics PH 110 Introductory PhysicsДокумент3 страницыThe Copperbelt University School of Mathematics and Natural Sciences Department of Physics PH 110 Introductory PhysicsLazy BanditОценок пока нет
- Lab Report On ECE 210 Lab1Документ6 страницLab Report On ECE 210 Lab1Joanne Lai100% (1)
- A Fundamental Study Inter-Area Oscillations Power SystemsДокумент8 страницA Fundamental Study Inter-Area Oscillations Power SystemsLuis MuñozОценок пока нет
- SPLM #7 - Non-Sinusoidal WaveformДокумент32 страницыSPLM #7 - Non-Sinusoidal WaveformSherwin PagpaguitanОценок пока нет
- GATE Analog Circuits BookДокумент12 страницGATE Analog Circuits BookFaniAli100% (1)
- Protective Relaying QuizДокумент3 страницыProtective Relaying QuizCattleya Tabor PeñalosaОценок пока нет
- Proakis ProblemsДокумент4 страницыProakis ProblemsJoonsung Lee0% (1)
- Exam 2 SolДокумент6 страницExam 2 Soldummy1957jОценок пока нет
- Electrical Overstress (EOS): Devices, Circuits and SystemsОт EverandElectrical Overstress (EOS): Devices, Circuits and SystemsОценок пока нет
- Numerical Solutions of Boundary Value Problems for Ordinary Differential EquationsОт EverandNumerical Solutions of Boundary Value Problems for Ordinary Differential EquationsA.K. AzizОценок пока нет
- Structure and Properties of Inorganic Solids: International Series of Monographs in Solid State PhysicsОт EverandStructure and Properties of Inorganic Solids: International Series of Monographs in Solid State PhysicsОценок пока нет
- Fis-Opf Ach PaymentsДокумент5 страницFis-Opf Ach PaymentscrazytrainОценок пока нет
- G3508 - 600kvaДокумент7 страницG3508 - 600kvaJim Patrick ChombaОценок пока нет
- Leaflet US5Ge ProtectedДокумент3 страницыLeaflet US5Ge Protectedquochung0606Оценок пока нет
- Instalación Sensor RPM TurboДокумент13 страницInstalación Sensor RPM TurboLuis Herrera MarinОценок пока нет
- Set 2 Unit 2 PDF FreeДокумент13 страницSet 2 Unit 2 PDF FreeASHWATH G (RA2111018010045)Оценок пока нет
- Noise Control in BuildingsДокумент36 страницNoise Control in BuildingsEmily Ong100% (1)
- Structural Equation Model : Determinant of Customer Satisfaction and It S Implications On Customer EngagementДокумент15 страницStructural Equation Model : Determinant of Customer Satisfaction and It S Implications On Customer EngagementGSA publishОценок пока нет
- MARTA: 2012 KPMG Phase II Final DraftДокумент114 страницMARTA: 2012 KPMG Phase II Final DraftthomaswheatleyОценок пока нет
- 1 Pre-Lab: Lab 07: Sampling, Convolution, and FIR FilteringДокумент12 страниц1 Pre-Lab: Lab 07: Sampling, Convolution, and FIR Filteringdemetrickn0% (1)
- NTSE MAT Chattisgarh Paper 2011 PDFДокумент14 страницNTSE MAT Chattisgarh Paper 2011 PDFKareena GuptaОценок пока нет
- TIA Workshop ITBДокумент48 страницTIA Workshop ITBFirman Suhendra100% (1)
- WRO 2018 WeDo RegularДокумент14 страницWRO 2018 WeDo RegularAlaas AlvcaszaОценок пока нет
- Arco Solar Inc.: Case Analysis OnДокумент12 страницArco Solar Inc.: Case Analysis OnAnish RajОценок пока нет
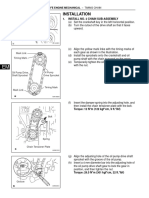
- Sincronizacion de Motor Toyota 2az-FeДокумент12 страницSincronizacion de Motor Toyota 2az-FeWilliams NavasОценок пока нет
- Em 59717521644Документ68 страницEm 59717521644Mostafa MirbaghriОценок пока нет
- ETL Specification Table of Contents: Change LogДокумент3 страницыETL Specification Table of Contents: Change LogKarthik RaparthyОценок пока нет
- System Failure AnalysisДокумент9 страницSystem Failure AnalysisHermance Yosepf Setiarto Harimurti50% (2)
- Product Presentation PPT NeerajДокумент8 страницProduct Presentation PPT NeerajNeeraj UdiniyaОценок пока нет
- Experience The Latest & Safest in Building Circuit ProtectionДокумент28 страницExperience The Latest & Safest in Building Circuit ProtectionYashwanth KrishnanОценок пока нет
- Final Project Miguel Santana GallegoДокумент44 страницыFinal Project Miguel Santana GallegoDaniel PereiraОценок пока нет
- Glenair Connector Terms - SummaryДокумент4 страницыGlenair Connector Terms - SummarybenОценок пока нет
- QA/QC Filling INDEX: North Gas Compression Plants (NGCP) Pipelines Index File Name File #Документ3 страницыQA/QC Filling INDEX: North Gas Compression Plants (NGCP) Pipelines Index File Name File #deva017Оценок пока нет
- Lexus Brand BrochureДокумент40 страницLexus Brand Brochurejammypops100% (1)
- Project Report JamiaДокумент76 страницProject Report JamiaShoaibОценок пока нет
- Kevin D Thomas - Activated Carbon and Lemon Peels As Adsorbent For Removing Oil From Waste WaterДокумент37 страницKevin D Thomas - Activated Carbon and Lemon Peels As Adsorbent For Removing Oil From Waste WaterRejinОценок пока нет
- Pricing - Biznet GIO - Cloud Service Provider Indonesia PDFДокумент1 страницаPricing - Biznet GIO - Cloud Service Provider Indonesia PDFTohirОценок пока нет
- 3BSE035980-600 A en System 800xa Control 6.0 AC 800M Configuration PDFДокумент580 страниц3BSE035980-600 A en System 800xa Control 6.0 AC 800M Configuration PDFWaqas AnjumОценок пока нет
- Thyristor PDFДокумент10 страницThyristor PDFMihir HembramОценок пока нет