Вам также может понравиться
- 4.3 Identificación y EspecificacionesДокумент7 страниц4.3 Identificación y EspecificacionesTheBodkinsОценок пока нет
- Ejercicios SAPДокумент71 страницаEjercicios SAPJeremy TylerОценок пока нет
- Catálogo de Aerogeneradores RS PDFДокумент11 страницCatálogo de Aerogeneradores RS PDFChevy ChevОценок пока нет
- Certificado RitДокумент1 страницаCertificado RitYuli PedrazaОценок пока нет
- Ejercicios VSLM PDFДокумент9 страницEjercicios VSLM PDFChevy ChevОценок пока нет
- Biodom Manual Programacion PDFДокумент64 страницыBiodom Manual Programacion PDFChevy ChevОценок пока нет
- 2-Ejercicios 02 PDFДокумент3 страницы2-Ejercicios 02 PDFChevy ChevОценок пока нет
- A03P02UD1D00 BibliografiaTDT PDFДокумент6 страницA03P02UD1D00 BibliografiaTDT PDFChevy ChevОценок пока нет
- Agentes FisicosДокумент322 страницыAgentes FisicosAlejandro Jacob Iturra100% (1)
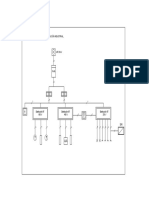
- Esquema UnifilarДокумент1 страницаEsquema UnifilarChevy ChevОценок пока нет
- Tipos de Virus InformáticosДокумент3 страницыTipos de Virus Informáticosandel chavesОценок пока нет
- Preguntas de Basicas Redes TelecomДокумент10 страницPreguntas de Basicas Redes TelecomRicardo Jarquin AndurayОценок пока нет
- Actividad 2 PDFДокумент42 страницыActividad 2 PDFNelson Lozano SantosОценок пока нет
- 3 Circuitos DigitalesДокумент6 страниц3 Circuitos DigitalesmiguelОценок пока нет
- Examen - Computacion BasicaДокумент2 страницыExamen - Computacion Basicarichard_en2Оценок пока нет
- 7310-7320 VentasДокумент4 страницы7310-7320 Ventasruyolmos_zeroОценок пока нет
- Formato IEEEДокумент8 страницFormato IEEEWilliam Fernando Arenas AlvarezОценок пока нет
- Herramientas de Comunicación en InternetДокумент6 страницHerramientas de Comunicación en InternetNayeliОценок пока нет
- El Computador SimpleДокумент76 страницEl Computador SimpleAlejandra ChuchonОценок пока нет
- WhatsApp Desde La PCДокумент9 страницWhatsApp Desde La PCRoger Armando Contreras CorralesОценок пока нет
- Samba 4Документ33 страницыSamba 4Alex Iván Pérez ChicaОценок пока нет
- Práctica 1 Introducción A SDR y GNURadioДокумент6 страницPráctica 1 Introducción A SDR y GNURadioAlvaro Ignacio100% (1)
- Ramirez CristyCecille Sesion9Документ5 страницRamirez CristyCecille Sesion9KristyОценок пока нет
- Panorama IlevoДокумент8 страницPanorama IlevoFer DehОценок пока нет
- Micro WikiДокумент5 страницMicro WikiJhonny JanampaОценок пока нет
- Grado 6º - Guia 3 - El Disco DuroДокумент2 страницыGrado 6º - Guia 3 - El Disco DuroIngrid Lizeth Burbano GuerreroОценок пока нет
- Ccna3v5capitulo8 150925235132 Lva1 App6892Документ86 страницCcna3v5capitulo8 150925235132 Lva1 App6892Guido FélixОценок пока нет
- Guía de Instalación de SGBDДокумент6 страницGuía de Instalación de SGBDMartha BarahonaОценок пока нет
- Ether ChanelДокумент15 страницEther Chanelwilliam_mc166692Оценок пока нет
- Manual Usuario TV LG m1962d m2062d m2262d m2362d m2762dДокумент119 страницManual Usuario TV LG m1962d m2062d m2262d m2362d m2762dedolea4932100% (1)
- El ABC de La Telefonía CelularДокумент8 страницEl ABC de La Telefonía CelularmaybearОценок пока нет
- Cuadro Comparativo ANTIVIRUSДокумент6 страницCuadro Comparativo ANTIVIRUSEdyth Lemus100% (1)
- ForenseДокумент29 страницForensenormluzОценок пока нет
- Caso de Uso PubligraficaДокумент8 страницCaso de Uso PubligraficaFernanda BastidasОценок пока нет
- Manual Teórico de Informática BásicaДокумент10 страницManual Teórico de Informática Básicapaul790905Оценок пока нет
- Arquitectura de Un Procesador Digital de SeñalesДокумент4 страницыArquitectura de Un Procesador Digital de SeñalesFernando OsorioОценок пока нет
- Asterisk 13.6.0 - Instalación en CentOS 7Документ5 страницAsterisk 13.6.0 - Instalación en CentOS 7Arnol2007Оценок пока нет