Вам также может понравиться
- Cours Machines Fluide CompressibleДокумент89 страницCours Machines Fluide CompressibleRachid MeftahОценок пока нет
- PhysiqueДокумент28 страницPhysiqueRoxana ZogoreanОценок пока нет
- Khebbache Hicham PDFДокумент154 страницыKhebbache Hicham PDFNoureddine GuersiОценок пока нет
- TDTH4 09 10Документ4 страницыTDTH4 09 10ELArabiFatimaezzahraaОценок пока нет
- Epfl TH3348Документ176 страницEpfl TH3348RafikBlsОценок пока нет
- Fortier Topping Hugo MScA 2014 PDFДокумент112 страницFortier Topping Hugo MScA 2014 PDFMehdi BechaОценок пока нет
- TD 2Документ4 страницыTD 2Abd El Basset BeNmansourОценок пока нет
- Aero Terprop-Moteurs A ReactionДокумент7 страницAero Terprop-Moteurs A ReactionAhmed GuerrahОценок пока нет
- WWW Lavionnaire FR MotorElements Php#CompresseursДокумент27 страницWWW Lavionnaire FR MotorElements Php#CompresseursJawad HamritiОценок пока нет
- Commande Par Mode Glissant-Floue Pour La PDFДокумент114 страницCommande Par Mode Glissant-Floue Pour La PDFMeziane LarbiОценок пока нет
- Schematheque 2004 ExemplesДокумент43 страницыSchematheque 2004 Exemplesmhamedben100% (1)
- Rapport AerospinaДокумент26 страницRapport AerospinaFatma BenbrahimОценок пока нет
- 4 PDFДокумент8 страниц4 PDFIkram ZekriОценок пока нет
- Instrumentation C OmpresseurДокумент13 страницInstrumentation C Ompresseurjeanpaulkinde100% (2)
- DS Mecanique 12128539811Документ5 страницDS Mecanique 12128539811Guy EffaОценок пока нет
- These Achour TaharДокумент183 страницыThese Achour TahardimachampionОценок пока нет
- Modélisation Analytique Et Numérique de La Cavité Interne D'un Injecteur Rotatif Fronde Pour Turbines À GazДокумент176 страницModélisation Analytique Et Numérique de La Cavité Interne D'un Injecteur Rotatif Fronde Pour Turbines À Gazmouf47100% (1)
- Yves Galland, Gilles Roy-Révolution Aéronautique, Le Défi de l'Environnement-Pearson Education (2008)Документ175 страницYves Galland, Gilles Roy-Révolution Aéronautique, Le Défi de l'Environnement-Pearson Education (2008)younnell100% (1)
- These ECL2008-26 Abu-TabakДокумент207 страницThese ECL2008-26 Abu-TabakNabil Saïdani100% (1)
- Cours TPH 2010 PDFДокумент60 страницCours TPH 2010 PDFfatalОценок пока нет
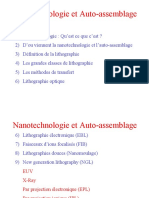
- Cours Lithographie 1Документ125 страницCours Lithographie 1Hamza Tazi100% (1)
- HDR EgДокумент192 страницыHDR EgibrahimОценок пока нет
- Intro B1480 B4410 PDFДокумент3 страницыIntro B1480 B4410 PDFMomar Talla DiawОценок пока нет
- 2 MliДокумент3 страницы2 MliNabilBouabanaОценок пока нет
- Systemes AsservisДокумент6 страницSystemes AsservisJalil AkaabouneОценок пока нет
- DS5 SujetДокумент7 страницDS5 SujetPierre BeckОценок пока нет
- Commandes Hybrides de La Machine Asynchr PDFДокумент175 страницCommandes Hybrides de La Machine Asynchr PDFELmokhtar HamrouniОценок пока нет
- Machines SpécialesДокумент78 страницMachines SpécialesSidali BmrОценок пока нет
- OuvreportailstatiqueSTI2011 10 17Документ5 страницOuvreportailstatiqueSTI2011 10 17sedmorabetОценок пока нет
- FLICKERДокумент21 страницаFLICKERKarim SenhajiОценок пока нет
- Cours Etatde Lart Du Geneie Electrique PDFДокумент40 страницCours Etatde Lart Du Geneie Electrique PDFRyn BnОценок пока нет
- Cours Initiation CEM DARKAWIДокумент106 страницCours Initiation CEM DARKAWIYann ElhamОценок пока нет
- Chapitre II Final TransistorДокумент30 страницChapitre II Final TransistorHayet SeninaОценок пока нет
- Szhrawi Stockage InertielДокумент20 страницSzhrawi Stockage InertielShai MaОценок пока нет
- Agitation Au Réveil D'une Anesthésie GéuraneДокумент30 страницAgitation Au Réveil D'une Anesthésie GéuranemarОценок пока нет
- Dossier BДокумент14 страницDossier BAbdelbaki ElfahemОценок пока нет
- Daiboun Sahel Salah Sabry MagisterДокумент133 страницыDaiboun Sahel Salah Sabry Magisterbiboche100% (1)
- Thèse de Nicolas Ténèze Sur La Stratégie D'israëlДокумент560 страницThèse de Nicolas Ténèze Sur La Stratégie D'israëlLa Dépêche du MidiОценок пока нет
- Memoire Commande Vectorielle Avec Observateur Interconnecté Pour La Machine AsynchroneДокумент79 страницMemoire Commande Vectorielle Avec Observateur Interconnecté Pour La Machine AsynchroneMahmoud SettouОценок пока нет
- Cammande RST de MASDEДокумент111 страницCammande RST de MASDEfola folaОценок пока нет
- Propulsion AerospatialeДокумент291 страницаPropulsion AerospatialemariОценок пока нет
- Glosario de AeronauticoДокумент45 страницGlosario de AeronauticoTimo GomezОценок пока нет
- La Repartition Optimale de La Puissance Reactive Pour Le Controle Des Tensions de Barre D'un Reseau Electrique Par Simplex LP PDFДокумент161 страницаLa Repartition Optimale de La Puissance Reactive Pour Le Controle Des Tensions de Barre D'un Reseau Electrique Par Simplex LP PDFPhilipe PereiraОценок пока нет
- 26 GMéc Installations Énergétiques Et TurboДокумент63 страницы26 GMéc Installations Énergétiques Et Turboiraoui jamal (Ebay)Оценок пока нет
- T2 - SCN - Optech - b1000020-fr (60577) PDFДокумент35 страницT2 - SCN - Optech - b1000020-fr (60577) PDFLuc KplОценок пока нет
- Antipompage ResuméДокумент8 страницAntipompage ResuméAmineAlemОценок пока нет
- Ms ELN Boussaid+Morad PDFДокумент128 страницMs ELN Boussaid+Morad PDFmechtoub sofianeОценок пока нет
- Effet de Lenergie Dirradiation Sur La Resistance Serie Dans Une Photopile (N+/P/P+) Au Silicium A Jonctions Verticales SeriesДокумент13 страницEffet de Lenergie Dirradiation Sur La Resistance Serie Dans Une Photopile (N+/P/P+) Au Silicium A Jonctions Verticales SeriesIJAR JOURNALОценок пока нет
- TP NumericsДокумент4 страницыTP NumericsOmar OmarioОценок пока нет
- TP5 CommandemodeglissantДокумент2 страницыTP5 CommandemodeglissantISLAM BENHAMIDAОценок пока нет
- TheseДокумент210 страницTheseR.s. FélixОценок пока нет
- CFM2007 1458Документ6 страницCFM2007 1458Mahdi LabedОценок пока нет
- TD Frein AppontageДокумент12 страницTD Frein Appontagehaitam100% (1)
- CCMP Sciences-Industrielles 2010 PSIДокумент30 страницCCMP Sciences-Industrielles 2010 PSIMohamedBenKacemОценок пока нет
- CI04 TD11 Sujet - D - Terminer Un Champ de Vecteur VitesseДокумент6 страницCI04 TD11 Sujet - D - Terminer Un Champ de Vecteur Vitessemed mahfoud bounaОценок пока нет
- Construction AbaqueДокумент16 страницConstruction AbaqueadsrjmОценок пока нет
- 2021 03 Metro SI Sujet1 Exo1 ChuteDroneДокумент3 страницы2021 03 Metro SI Sujet1 Exo1 ChuteDroneYassineОценок пока нет
- 2021 CentresEtrangers Exo1 Sujet SautParachute 10ptsДокумент6 страниц2021 CentresEtrangers Exo1 Sujet SautParachute 10ptsGabrielОценок пока нет
- 3ei 65Документ2 страницы3ei 65WalidAdrarОценок пока нет
- PFE 17-18 Liste Finale PDFДокумент11 страницPFE 17-18 Liste Finale PDFWalidAdrarОценок пока нет
- Les Traités EGEMДокумент21 страницаLes Traités EGEMWalidAdrarОценок пока нет
- Programme Licence Académique Génie ElectriqueДокумент13 страницProgramme Licence Académique Génie ElectriqueWalidAdrar100% (1)
- 9-ELT-Commandes ElectriquesДокумент67 страниц9-ELT-Commandes ElectriquesWalidAdrarОценок пока нет
- Les Bascules de Schmitt - Applications Des Bascules de SchmittДокумент6 страницLes Bascules de Schmitt - Applications Des Bascules de SchmittWalidAdrarОценок пока нет
- Polycopie TPДокумент22 страницыPolycopie TPWalidAdrarОценок пока нет
- Ele6904 Aut05 001Документ22 страницыEle6904 Aut05 001WalidAdrarОценок пока нет
- Comment Presenter PDFДокумент34 страницыComment Presenter PDFWalidAdrarОценок пока нет
- Le Théorème de Boucherot - Site Sur Les Nombres Complexe Et Les FractalesДокумент5 страницLe Théorème de Boucherot - Site Sur Les Nombres Complexe Et Les FractalesWalidAdrarОценок пока нет
- Asservissement Visuel Par Une Approche de Commande Predictive Non LineaireДокумент6 страницAsservissement Visuel Par Une Approche de Commande Predictive Non LineaireWalidAdrarОценок пока нет
- Observateurs Pour Systemes A Retard Variable Et Inconnu PDFДокумент6 страницObservateurs Pour Systemes A Retard Variable Et Inconnu PDFWalidAdrarОценок пока нет
- Une Methode Statistique de Detection Danomalie Pour Les Modeles A Espace Detat Non LineairesДокумент4 страницыUne Methode Statistique de Detection Danomalie Pour Les Modeles A Espace Detat Non LineairesWalidAdrarОценок пока нет
- DTC - Variateurs de Vitesse - ABBДокумент4 страницыDTC - Variateurs de Vitesse - ABBWalidAdrarОценок пока нет
- Sites À ConsulterДокумент2 страницыSites À ConsulterWalidAdrarОценок пока нет
- Application de La Methode Adaboost A La Reconnaissance Automatique de La ParoleДокумент8 страницApplication de La Methode Adaboost A La Reconnaissance Automatique de La ParoleWalidAdrarОценок пока нет
- Guide Dsac EfbДокумент41 страницаGuide Dsac Efbmehdi eskalliОценок пока нет
- 070 Procédures OpérationnellesДокумент198 страниц070 Procédures OpérationnellespatrouilledeafranceОценок пока нет
- Arrete CNRAДокумент12 страницArrete CNRAJohn JohnОценок пока нет
- Script OFFДокумент2 страницыScript OFFSanda Faniry AndriatahinyОценок пока нет
- FR Manuel Dutilisation DR SKY HDДокумент24 страницыFR Manuel Dutilisation DR SKY HDunknown23jrОценок пока нет
- Drone Comment Fonctionne Un DroneДокумент28 страницDrone Comment Fonctionne Un Dronemihai_1001Оценок пока нет
- Analyse Fonctionnelle Cours 1Документ10 страницAnalyse Fonctionnelle Cours 1Eddine-ttaib Kacem100% (1)
- HelistationДокумент2 страницыHelistationDongo Edgar KouaméОценок пока нет
- Guide - FR - 2.11 NeoflyДокумент23 страницыGuide - FR - 2.11 NeoflySnideОценок пока нет
- Cours Opérations Aériennes (Francais) Partie 1-1Документ140 страницCours Opérations Aériennes (Francais) Partie 1-1Kith MhakaОценок пока нет
- Airbus Pilots Guide FRДокумент106 страницAirbus Pilots Guide FRtgudmanОценок пока нет
- Elabo CartesДокумент56 страницElabo CartesBacary SENEОценок пока нет
- INTRODUCTION A LA RECHERCHE Operationnelle PDFДокумент14 страницINTRODUCTION A LA RECHERCHE Operationnelle PDFAnes Mansour100% (1)
- Memoire Douala PDFДокумент112 страницMemoire Douala PDFLandry Abina100% (1)
- Aero 11Документ16 страницAero 11sumaleeОценок пока нет
- B737 Banque de QuestionsДокумент121 страницаB737 Banque de QuestionsScribdTranslationsОценок пока нет
- Chap 07Документ30 страницChap 07Issam Sembati100% (1)
- Guide Candidat PPLДокумент35 страницGuide Candidat PPLhocimtm0% (1)
- Rapport PDFДокумент24 страницыRapport PDFKahina Lemaissi100% (2)
- Easa Sib Casa-2021-03 1Документ5 страницEasa Sib Casa-2021-03 1Airbus330 Airbus330Оценок пока нет
- HAPIДокумент42 страницыHAPIرابح رحمونيОценок пока нет
- Guide de FormationДокумент39 страницGuide de FormationJean BordeОценок пока нет
- Manex LFMTДокумент26 страницManex LFMTbink-simracingОценок пока нет
- Manex PA34 V 7Документ39 страницManex PA34 V 7latouss400Оценок пока нет
- Ir NcoДокумент1 страницаIr NcoMEZZAROBBAОценок пока нет
- CAEA Connaissance Des Aeronefs 2004Документ4 страницыCAEA Connaissance Des Aeronefs 2004Chabou RafikОценок пока нет
- Check R44 RAVEN IIДокумент27 страницCheck R44 RAVEN IIVENOM VENOMОценок пока нет
- PH 2 ExostsДокумент3 страницыPH 2 ExostsNajimou Alade TidjaniОценок пока нет
- Examen Final Aerodromesvoa 312-2019Документ2 страницыExamen Final Aerodromesvoa 312-2019brickley bri100% (1)
- Aérodynamique CompletДокумент7 страницAérodynamique CompletaymenОценок пока нет