Вам также может понравиться
- Region de Frecuencia Maxima de OscilacionДокумент13 страницRegion de Frecuencia Maxima de OscilacionSvart BegravelseОценок пока нет
- ProblemasДокумент8 страницProblemasHector Rodriguez50% (2)
- Ejercicio 8Документ6 страницEjercicio 8Joseph CeballosОценок пока нет
- Vibraciones mecánicas ejerciciosДокумент3 страницыVibraciones mecánicas ejerciciosUlises OrnelasОценок пока нет
- Estudio de Las Vibraciones y Aplicaciones en Diversos Medios 11Документ13 страницEstudio de Las Vibraciones y Aplicaciones en Diversos Medios 11Alfredo Alejandro Valenzuela100% (1)
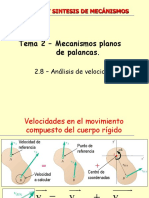
- Análisis de Velocidad en MecanismosДокумент16 страницAnálisis de Velocidad en MecanismosRafael andresОценок пока нет
- S2 - Mecanismos PDFДокумент29 страницS2 - Mecanismos PDFchristianОценок пока нет
- Estudio de Caso MecanismosДокумент60 страницEstudio de Caso MecanismosErik Blanco0% (1)
- 3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosДокумент22 страницы3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosJose ReginoОценок пока нет
- Temporizadores 160919224308Документ4 страницыTemporizadores 160919224308erwin alvarez salazarОценок пока нет
- 2-32. Determine La Movilidad, La Condición de Grashof y La Clasificación de Barker Del Mecanismo Mostrado en La FiguraДокумент6 страниц2-32. Determine La Movilidad, La Condición de Grashof y La Clasificación de Barker Del Mecanismo Mostrado en La FiguraKarencitaCarriónClaudioОценок пока нет
- Mecanismos RotacionalesДокумент8 страницMecanismos Rotacionaleszorick sanchezОценок пока нет
- Mecánica de Fluidos Ejercicios Unidad 4Документ11 страницMecánica de Fluidos Ejercicios Unidad 4Rulo Oo SaavedraОценок пока нет
- EP DINAMICA 2016 B SolucionarioДокумент5 страницEP DINAMICA 2016 B SolucionarioAndres Siu AlvaradoОценок пока нет
- Diseño de Elementos Mecánicos: 4.1 Nomenclatura Y Clasificación de EngranesДокумент12 страницDiseño de Elementos Mecánicos: 4.1 Nomenclatura Y Clasificación de EngranesGerardo HernándezОценок пока нет
- Examen Unidad 4 de Mecanismos PDFДокумент5 страницExamen Unidad 4 de Mecanismos PDFLuis PonceОценок пока нет
- Mecanismo de 4 BarrasДокумент4 страницыMecanismo de 4 BarrasPablo Martin CadenaОценок пока нет
- Unidad 3. Vibraciones 2.0Документ34 страницыUnidad 3. Vibraciones 2.0Gerardo HernándezОценок пока нет
- Pregunta ExamenДокумент9 страницPregunta ExamenAmilcar RuizОценок пока нет
- Analisis de Redes Electricas (Metodo de Potencias) Majo, LennardДокумент3 страницыAnalisis de Redes Electricas (Metodo de Potencias) Majo, LennardLeo GarciaОценок пока нет
- VISCOSIDADДокумент21 страницаVISCOSIDADJoaquin Rodriguez UreñaОценок пока нет
- Dinamica Sacudimiento VolanteДокумент30 страницDinamica Sacudimiento VolanteAndres Vega FerreroОценок пока нет
- 4Документ2 страницы4Danny Jesse Lingard Pullotasig0% (1)
- Cuestionario Capitulo 2 PDFДокумент9 страницCuestionario Capitulo 2 PDFAlelí MoreivaОценок пока нет
- Práctica 2Документ6 страницPráctica 2Jorge EspinosaОценок пока нет
- Maquinas y MecanismosДокумент51 страницаMaquinas y MecanismosVeronica Ramirez BarronОценок пока нет
- Regulación tensiónДокумент10 страницRegulación tensiónIsaac OrocioОценок пока нет
- Transmisión de Potencia Por Medio de Barras Cilíndricas.Документ5 страницTransmisión de Potencia Por Medio de Barras Cilíndricas.Eliezer GomezОценок пока нет
- 4.3 Circulo de Mohr para DeformacionДокумент4 страницы4.3 Circulo de Mohr para Deformacionfabiola MATIASОценок пока нет
- Mecanismos EspecialesДокумент11 страницMecanismos Especialesalexis basultoОценок пока нет
- Cinemática de La VibraciónДокумент18 страницCinemática de La VibraciónJoshua RomeroОценок пока нет
- Inversion CinematicaДокумент5 страницInversion CinematicaCortazar CesarОценок пока нет
- VM - Unidad I. Cinematica de VibracionesДокумент5 страницVM - Unidad I. Cinematica de VibracionesIvan Zamora100% (1)
- Cinemática de La VibraciónДокумент15 страницCinemática de La VibraciónDaniel González Ortega100% (1)
- Vibraciones mecánicas - Problemas de resortes y sistemas de un grado de libertadДокумент7 страницVibraciones mecánicas - Problemas de resortes y sistemas de un grado de libertadCesar BautistaОценок пока нет
- 27Документ2 страницы27Misael AguilaОценок пока нет
- Ejercicios VibracionesДокумент4 страницыEjercicios VibracionesYahir AguilarОценок пока нет
- Clasificación de Problemas en SintesisДокумент2 страницыClasificación de Problemas en SintesisJORGE ANTONIO PEREZ ROBLESОценок пока нет
- Teorema de KennedyДокумент7 страницTeorema de KennedyLeslie OchoaОценок пока нет
- ACELERACIÓN Mecanismos Ejercicios 1Документ10 страницACELERACIÓN Mecanismos Ejercicios 1MauricioОценок пока нет
- Introducción A La Modelación de Sistemas ExpoДокумент28 страницIntroducción A La Modelación de Sistemas ExpoMarioОценок пока нет
- Lección 2.3Документ11 страницLección 2.3Carlitos TorresОценок пока нет
- Teorema Del Valor FinalДокумент3 страницыTeorema Del Valor FinalMisael ChurquinaОценок пока нет
- Historia, Aplicaciones, Ventajas y Desventajas de La NeumaticaДокумент3 страницыHistoria, Aplicaciones, Ventajas y Desventajas de La NeumaticaJosua yair Castañeda LariosОценок пока нет
- Introducción A La Síntesis de MecanismoДокумент6 страницIntroducción A La Síntesis de MecanismourbalОценок пока нет
- Problemas CapДокумент6 страницProblemas CapCristhianAlexanderVega0% (2)
- 4.3 Analisis Analitico y Grafico de Levas PlanasДокумент6 страниц4.3 Analisis Analitico y Grafico de Levas Planasalexander velazcoОценок пока нет
- 12bcs-Mecanismos - Problemas - 2 - 3 Analisis de VelocidadesДокумент10 страниц12bcs-Mecanismos - Problemas - 2 - 3 Analisis de VelocidadesVerónicaMhОценок пока нет
- Vibraciones Libres Amortiguadas IДокумент14 страницVibraciones Libres Amortiguadas Ijulian david cantor castelblancoОценок пока нет
- Mecanismo Whitworth 1Документ6 страницMecanismo Whitworth 1Alexis JaviherОценок пока нет
- Trabajo y EnergíaДокумент2 страницыTrabajo y EnergíaLupita RegОценок пока нет
- Introducción a la síntesis de mecanismosДокумент6 страницIntroducción a la síntesis de mecanismosAlfonsoОценок пока нет
- Teoria de Denavit Harterbert (Recuperado Automáticamente)Документ7 страницTeoria de Denavit Harterbert (Recuperado Automáticamente)Nicolas OtavoОценок пока нет
- TextoДокумент2 страницыTextoJair Andrey Romero DiazОценок пока нет
- Diseño de levas con softwareДокумент5 страницDiseño de levas con softwarequinojarg100% (1)
- Timer Circuito DisparoДокумент15 страницTimer Circuito DisparoPedro Rivera Muñoz0% (1)
- 2 ParcialДокумент4 страницы2 ParcialDAvudОценок пока нет
- Solucion Al EjercicioДокумент5 страницSolucion Al EjercicioPresupuesto 2020Оценок пока нет
- Investigación Grados de LibertadДокумент10 страницInvestigación Grados de LibertadJav RivОценок пока нет
- 030220444Документ64 страницы030220444mauro31Оценок пока нет
- PRACTICA Transistor BC557Документ3 страницыPRACTICA Transistor BC557Svart Begravelse100% (1)
- Sistemas Computacionales TutorialДокумент17 страницSistemas Computacionales TutorialSvart BegravelseОценок пока нет
- Dixell España XR40CX SP M&M r1 1 12 02 2008 PDFДокумент5 страницDixell España XR40CX SP M&M r1 1 12 02 2008 PDFSvart Begravelse100% (2)
- Manual Tecnico de Aire Acondicionado KaysunДокумент48 страницManual Tecnico de Aire Acondicionado KaysunSvart BegravelseОценок пока нет
- Jitel 15Документ2 страницыJitel 15Luis Ramirez CОценок пока нет
- CONVOCATORIA - Manutencion - SEP-PROSPERA - 2do - A - 2018Документ3 страницыCONVOCATORIA - Manutencion - SEP-PROSPERA - 2do - A - 2018Anonymous aKpO1BjОценок пока нет
- Lenguaje No VerbalДокумент1 страницаLenguaje No VerbalSvart BegravelseОценок пока нет
- Convocatoria Manutencion Sep-Prospera 2do A 2018Документ25 страницConvocatoria Manutencion Sep-Prospera 2do A 2018Svart BegravelseОценок пока нет
- Optoacoplador controla TRIACДокумент5 страницOptoacoplador controla TRIACSvart BegravelseОценок пока нет
- Amplificadores OperacionalesДокумент6 страницAmplificadores OperacionalesSvart BegravelseОценок пока нет
- La CinemáticaДокумент3 страницыLa CinemáticaSvart BegravelseОценок пока нет
- ConvenioДокумент6 страницConvenioSvart BegravelseОценок пока нет
- Optoacoplador controla TRIACДокумент5 страницOptoacoplador controla TRIACSvart BegravelseОценок пока нет
- PRACTICA Transistor BC557Документ2 страницыPRACTICA Transistor BC557Svart BegravelseОценок пока нет
- TEECn MДокумент1 страницаTEECn MSvart BegravelseОценок пока нет
- TAREAДокумент4 страницыTAREASvart BegravelseОценок пока нет
- ASIO4ALL v2 Manual de InstruccionesДокумент11 страницASIO4ALL v2 Manual de Instruccionesshanai64100% (4)
- Formulario PDFДокумент2 страницыFormulario PDFCelso Gayoso MinayaОценок пока нет
- DEFINICIÓN FUENTES DE INFORMACIÓN - Docx GRISELDAДокумент1 страницаDEFINICIÓN FUENTES DE INFORMACIÓN - Docx GRISELDAvictor faustinoОценок пока нет
- Nuevo Documento de TextoДокумент1 страницаNuevo Documento de TextoSvart BegravelseОценок пока нет
- La CinemáticaДокумент3 страницыLa CinemáticaSvart BegravelseОценок пока нет
- Instalar DriverEasy y activarlo con crackДокумент1 страницаInstalar DriverEasy y activarlo con crackSvart BegravelseОценок пока нет
- InformacionДокумент1 страницаInformacionSvart BegravelseОценок пока нет
- Desarrollo SustentableДокумент3 страницыDesarrollo SustentableSvart BegravelseОценок пока нет
- Curso de Linux para Novatos Brutos y Extremadamente Torpes (WWW - Yovani.netne - Net)Документ303 страницыCurso de Linux para Novatos Brutos y Extremadamente Torpes (WWW - Yovani.netne - Net)Geovanni100% (1)
- Moldeo en arena verde: proceso y característicasДокумент17 страницMoldeo en arena verde: proceso y característicasSvart Begravelse0% (1)
- Manual Linux 40Документ7 страницManual Linux 40Dante Cunurana MamaniОценок пока нет
- Diseño de Un Ventilador CentrifugoДокумент59 страницDiseño de Un Ventilador Centrifugomatematicafime100% (4)
- 6.secuencia Figuras Del EspacioДокумент5 страниц6.secuencia Figuras Del EspacioBarbara MachadoОценок пока нет
- L6-1 Empujes Terreno MurosДокумент24 страницыL6-1 Empujes Terreno MurosJose Leonardo Perez PerezОценок пока нет
- Kreps 1Документ52 страницыKreps 1Isabel Casher100% (1)
- Diapositivas Interrupción de Corrientes Capacitivas - Beimar RodríguezДокумент18 страницDiapositivas Interrupción de Corrientes Capacitivas - Beimar RodríguezBeimar Rodriguez GuerreroОценок пока нет
- ConjuntosNuméricosYSusEjemplosДокумент2 страницыConjuntosNuméricosYSusEjemplosHillary NuñezОценок пока нет
- Algebra 3. Lumbreras-1 PDFДокумент23 страницыAlgebra 3. Lumbreras-1 PDFedson herencia quispe100% (6)
- Operaciones de Notación CientíficaДокумент5 страницOperaciones de Notación CientíficaCarito RubilarОценок пока нет
- Antep Roy EctoДокумент43 страницыAntep Roy EctoHenni CovarrubiaОценок пока нет
- Representacion TerrestreДокумент14 страницRepresentacion Terrestreyoselina diazОценок пока нет
- La guerra de sexos: análisis de un juego clásico de coordinaciónДокумент2 страницыLa guerra de sexos: análisis de un juego clásico de coordinaciónsandl14Оценок пока нет
- Bases toma decisionesДокумент5 страницBases toma decisionesElia Hz B100% (1)
- Introduccion Al Analisis y Diseño de Pruebas de Presion PDFДокумент352 страницыIntroduccion Al Analisis y Diseño de Pruebas de Presion PDFjorge cruzОценок пока нет
- Prueba Agosto 5toДокумент7 страницPrueba Agosto 5toRicardo BecerraОценок пока нет
- 3º Seminario de Trigonometría PREUNIVERSITARIO-2007-II-Sara PDFДокумент11 страниц3º Seminario de Trigonometría PREUNIVERSITARIO-2007-II-Sara PDFRicardo RuizОценок пока нет
- Johannes de Sacrobosco BiografiaДокумент2 страницыJohannes de Sacrobosco BiografiaEuddy RosarioОценок пока нет
- Calentamiento y Climatización de PiscinasДокумент7 страницCalentamiento y Climatización de PiscinasMiguel de la torreОценок пока нет
- RASPADORES SECUNDARIOS 20071284 - BA - ReinigerCSS7 - Tecnipak - Es PDFДокумент7 страницRASPADORES SECUNDARIOS 20071284 - BA - ReinigerCSS7 - Tecnipak - Es PDFespinozcristian100% (1)
- InterpolaciónДокумент23 страницыInterpolaciónAeilim Pérez CastellanosОценок пока нет
- Esfuerzo-deformación y deformación unitaria en ingeniería de plásticosДокумент25 страницEsfuerzo-deformación y deformación unitaria en ingeniería de plásticosAndres ValОценок пока нет
- Linealización de Modelos PDFДокумент24 страницыLinealización de Modelos PDFGuillermo Castro ContardoОценок пока нет
- CДокумент7 страницCKirk Freire LópezОценок пока нет
- SEMIOTICA Y REPRESENTACIONESДокумент8 страницSEMIOTICA Y REPRESENTACIONESMaria Chantré0% (2)
- CÁLCULOS Coeficiente de RepartoДокумент8 страницCÁLCULOS Coeficiente de RepartoLeandroFuentesMedina0% (1)
- Algebra Superior Tarea Semana 7Документ8 страницAlgebra Superior Tarea Semana 7Angel PerezОценок пока нет
- Funciones reales de variableДокумент33 страницыFunciones reales de variableJonathan Tafur LuckОценок пока нет
- Informe Rendimiento Escolar Primer Semestre 2020Документ5 страницInforme Rendimiento Escolar Primer Semestre 2020Rosa Adriana Raiman AlecoyОценок пока нет
- Álgebra - Determinantes (Formulario CepreUni) PDFДокумент2 страницыÁlgebra - Determinantes (Formulario CepreUni) PDFUbaldo Bellido0% (2)
- Ensayo Ing - EconomicaДокумент6 страницEnsayo Ing - Economicapedro Alejandro Rodríguez SantiagoОценок пока нет