Вам также может понравиться
- 4 Transfer FunctionДокумент22 страницы4 Transfer FunctionSalihin FhooziОценок пока нет
- Week 9 - Dynamic Process BehaviourДокумент31 страницаWeek 9 - Dynamic Process BehaviourMohd AizadОценок пока нет
- Week 3 - Basic Elements in Control SystemДокумент16 страницWeek 3 - Basic Elements in Control SystemMohd Yashfi YunusОценок пока нет
- 3.2.1 - Instrumentation - MeasurementДокумент15 страниц3.2.1 - Instrumentation - MeasurementFnur FatihahОценок пока нет
- Lecture13 Chapter4 BoostandBuckBoost CCM Analysis-1Документ22 страницыLecture13 Chapter4 BoostandBuckBoost CCM Analysis-1Buridi JahnaviОценок пока нет
- Lecture12 Chapter4 - Buck - CCM - AnalysisДокумент39 страницLecture12 Chapter4 - Buck - CCM - AnalysisCarlos Alberto Viancha SalazarОценок пока нет
- 2 - Block Diagram PDFДокумент18 страниц2 - Block Diagram PDFMuhd FahmiОценок пока нет
- Control Yokogawa PDFДокумент59 страницControl Yokogawa PDFmiraОценок пока нет
- Lecture Note Chapter 5 First Order and Second Order Processes 2017Документ15 страницLecture Note Chapter 5 First Order and Second Order Processes 2017杜振维Оценок пока нет
- 2-1 1Документ108 страниц2-1 1gli7amiciОценок пока нет
- Control SystemДокумент48 страницControl SystemOlawale John AdeotiОценок пока нет
- Chapter 8 - Feedback ControllerДокумент35 страницChapter 8 - Feedback ControllerFakhrulShahrilEzanieОценок пока нет
- Toshiba 74HC595D (X34TTD-410-02) E 20160209-909557Документ10 страницToshiba 74HC595D (X34TTD-410-02) E 20160209-909557Vanesa RiveraОценок пока нет
- Boost Converter PSO PIDДокумент13 страницBoost Converter PSO PIDAliAlMisbahОценок пока нет
- ECD Lab 2Документ11 страницECD Lab 2punjabians626621Оценок пока нет
- Pid CernДокумент98 страницPid CernsybaritzОценок пока нет
- Using IEC 61850 Analogue GOOSE Messages for OLTC Control of Parallel TransformersДокумент22 страницыUsing IEC 61850 Analogue GOOSE Messages for OLTC Control of Parallel TransformersannymagoОценок пока нет
- Chapter 8Документ31 страницаChapter 8fosterОценок пока нет
- Inst PrabhaДокумент29 страницInst Prabharaj guptaОценок пока нет
- Chapter 2 (Print)Документ14 страницChapter 2 (Print)666aokiОценок пока нет
- © Career Avenues A1Документ160 страниц© Career Avenues A1Nomee PatelОценок пока нет
- Classical and Predictive Control Applied To A DC/DC Boost ConverterДокумент7 страницClassical and Predictive Control Applied To A DC/DC Boost ConverterSantiago Cortes PerdomoОценок пока нет
- DC-DC Boost Converter Performance StudyДокумент13 страницDC-DC Boost Converter Performance StudyAaaa DdddОценок пока нет
- Chapter 2 - Modeling in Fequency Domain (Part 2)Документ24 страницыChapter 2 - Modeling in Fequency Domain (Part 2)Thanes WaranОценок пока нет
- Real Time TestingДокумент27 страницReal Time TestingPower System OperationОценок пока нет
- Fuzzy Control of DC-DC Converters: Stability AnalysisДокумент4 страницыFuzzy Control of DC-DC Converters: Stability Analysisjoanelias45Оценок пока нет
- Study of Analog Phase-Locked Loop (APLL) : Exercise 9Документ10 страницStudy of Analog Phase-Locked Loop (APLL) : Exercise 9جمال سينغОценок пока нет
- NA Exp6-RL RC CircuitДокумент8 страницNA Exp6-RL RC CircuitakshithadharmasothОценок пока нет
- IJETR031972Документ7 страницIJETR031972erpublicationОценок пока нет
- PDC Lab Manual for ECE Students at SVCETДокумент64 страницыPDC Lab Manual for ECE Students at SVCETeswaranОценок пока нет
- Chapter 58: Coupled Advection For Heat ExchangerДокумент11 страницChapter 58: Coupled Advection For Heat ExchangerDan WolfОценок пока нет
- Lecture 7: Control of a DC Motor DriveДокумент25 страницLecture 7: Control of a DC Motor DrivePoliConDrive0% (1)
- Lecture 1011 TeamДокумент70 страницLecture 1011 TeamAmitav BaruaОценок пока нет
- Objectives: Experiment 6: Study of A Position Control ServomechanismДокумент8 страницObjectives: Experiment 6: Study of A Position Control ServomechanismU V DurgaraoОценок пока нет
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterДокумент21 страницаAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnОценок пока нет
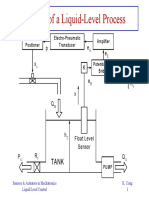
- Liquid Level ControlДокумент47 страницLiquid Level ControlranjithkrajОценок пока нет
- Modelling and Regulation of Dual-Output LCLC Resonant ConvertersДокумент6 страницModelling and Regulation of Dual-Output LCLC Resonant Convertersbacuoc.nguyen356Оценок пока нет
- Process Reaction Curve Model IdentificationДокумент17 страницProcess Reaction Curve Model IdentificationANDRÉS FELIPE SOTO CUELLARОценок пока нет
- Control Systems Lab Manual - With Challenging ExperimentsДокумент132 страницыControl Systems Lab Manual - With Challenging ExperimentsP POORNA CHANDRA REDDYОценок пока нет
- Check Fig 5Документ7 страницCheck Fig 5Sureshkumar AlagarsamyОценок пока нет
- Transfer FunctionsДокумент4 страницыTransfer FunctionsAhmed HamoudaОценок пока нет
- Chapter 1 Introduction To Process SystemДокумент111 страницChapter 1 Introduction To Process SystemCaratsSVTОценок пока нет
- TangChapter2 ChemicalProcessModelingNewДокумент63 страницыTangChapter2 ChemicalProcessModelingNewmuneebrashidОценок пока нет
- Unit 3Документ67 страницUnit 3Raghul T100% (1)
- Introduction To Practical Exercises Using MODICOM 2 ... - LJ Create PDFДокумент8 страницIntroduction To Practical Exercises Using MODICOM 2 ... - LJ Create PDFAnonymous FKMfvCbОценок пока нет
- AQRspicemodelДокумент13 страницAQRspicemodelRakesh SandarativjuОценок пока нет
- CHAPTER 1: Plant Process Characterization and PID: TheoryДокумент10 страницCHAPTER 1: Plant Process Characterization and PID: Theorynttu53Оценок пока нет
- Lab Manual BEEE DR RDДокумент76 страницLab Manual BEEE DR RDJohn WickОценок пока нет
- Small Signal Transfer Functions and Mathematical Model of The Boost Power ConverterДокумент6 страницSmall Signal Transfer Functions and Mathematical Model of The Boost Power ConverterNtokozo HlatshwayoОценок пока нет
- Fundamentals Training: Think About ControlДокумент23 страницыFundamentals Training: Think About ControlSadagopan RajaОценок пока нет
- Haque2004 - A Control Strategy Based On Extended P-Q Theory Usable in Parallel Active FiltersДокумент6 страницHaque2004 - A Control Strategy Based On Extended P-Q Theory Usable in Parallel Active Filtersrakeshee2007Оценок пока нет
- Design and Implementation of Type II Compensator in DC DC Switch Mode Step Up Power Supply WWW - Iranswitching.irДокумент5 страницDesign and Implementation of Type II Compensator in DC DC Switch Mode Step Up Power Supply WWW - Iranswitching.irseyed mohsen SalehiОценок пока нет
- Data SheetДокумент7 страницData SheetAlecio SilvaОценок пока нет
- AMJ41603 Environmental Process Control and Instrumentation: Lecture 3 (Week 4) Dynamic ModelingДокумент31 страницаAMJ41603 Environmental Process Control and Instrumentation: Lecture 3 (Week 4) Dynamic ModelingHana MuhammadОценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationОт EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationОценок пока нет
- Turton AppBДокумент114 страницTurton AppBamms9988Оценок пока нет
- Chapter 1 Actual Cond and Situation Analysis (Saiyidah)Документ5 страницChapter 1 Actual Cond and Situation Analysis (Saiyidah)FatinnnnnnОценок пока нет
- RP1 Rubrics For StudentsДокумент4 страницыRP1 Rubrics For Studentssiti surayaОценок пока нет
- Week03 Open MethodsДокумент23 страницыWeek03 Open MethodsFatinnnnnnОценок пока нет
- Tutorial2 22sept2017 CPE604 With AnswerДокумент11 страницTutorial2 22sept2017 CPE604 With AnswerFatinnnnnnОценок пока нет
- W1 Energy and Energy BalanceДокумент32 страницыW1 Energy and Energy BalanceFatinnnnnnОценок пока нет
- Rubric 1Документ1 страницаRubric 1FatinnnnnnОценок пока нет
- Format For Progress Report Writing RP1Документ2 страницыFormat For Progress Report Writing RP1Harris EffendiОценок пока нет
- Table of ContentsДокумент2 страницыTable of ContentsFatinnnnnnОценок пока нет
- Engineering Professionals and The Fight Against CorruptionДокумент2 страницыEngineering Professionals and The Fight Against CorruptionFatinnnnnnОценок пока нет
- Tutorial1 (Withanswers)Документ10 страницTutorial1 (Withanswers)FatinnnnnnОценок пока нет
- Turton AppBДокумент114 страницTurton AppBamms9988Оценок пока нет
- Lab Report 7Документ39 страницLab Report 7Fatinnnnnn100% (2)
- Tutorial3 6oct2017 CPE604Документ7 страницTutorial3 6oct2017 CPE604FatinnnnnnОценок пока нет
- Assignment 1 Oktober 2017Документ2 страницыAssignment 1 Oktober 2017FatinnnnnnОценок пока нет
- Mason's Gain Rule Explained for Determining System Transfer FunctionsДокумент4 страницыMason's Gain Rule Explained for Determining System Transfer FunctionsNur AqilahОценок пока нет
- Chapter 2 BДокумент16 страницChapter 2 BFatinnnnnnОценок пока нет
- Homework2 6oct2017 CPE604 With AnswersДокумент11 страницHomework2 6oct2017 CPE604 With AnswersFatinnnnnnОценок пока нет
- 2.4 - Block Diagram - Reduction PDFДокумент10 страниц2.4 - Block Diagram - Reduction PDFFatinnnnnnОценок пока нет
- Lab 5Документ2 страницыLab 5omglikeseriouslyОценок пока нет
- Project CharterДокумент1 страницаProject CharterFatinnnnnnОценок пока нет
- Chapter 1 AДокумент20 страницChapter 1 AFatinnnnnnОценок пока нет
- CHE 555 NUMERICAL METHODS & OPTIMIZATION ASSIGNMENT 2Документ1 страницаCHE 555 NUMERICAL METHODS & OPTIMIZATION ASSIGNMENT 2FatinnnnnnОценок пока нет
- Lab1 PDFДокумент16 страницLab1 PDFFatinnnnnnОценок пока нет
- Abstract 1Документ2 страницыAbstract 1FatinnnnnnОценок пока нет
- Tray Drier Lab ReportДокумент10 страницTray Drier Lab ReportFatinnnnnnОценок пока нет
- ELC501 Sample of An Argument and The Written Analysis For StudentsДокумент7 страницELC501 Sample of An Argument and The Written Analysis For Studentsaizuddin93100% (3)
- ELC Death PenaltyДокумент5 страницELC Death PenaltyFatinnnnnnОценок пока нет
- Sample of Calculations Heat ExchangerДокумент5 страницSample of Calculations Heat ExchangerFatinnnnnnОценок пока нет
- Grade 7 PortionsДокумент7 страницGrade 7 PortionsSnigdha ArunОценок пока нет
- Mechanics: Kinematics and DynamicsДокумент4 страницыMechanics: Kinematics and DynamicsSaifur RahmanОценок пока нет
- CBSE Class 12 Chemistry Practice Paper 2017Документ5 страницCBSE Class 12 Chemistry Practice Paper 2017rishi017Оценок пока нет
- Paper 1Документ14 страницPaper 1KhushilОценок пока нет
- ASTM F1498 NPT Thread Designation.18598 PDFДокумент11 страницASTM F1498 NPT Thread Designation.18598 PDFJohn PaulsyОценок пока нет
- Dynamic Analysis of Pump Block Foundation - VaidyanathanДокумент5 страницDynamic Analysis of Pump Block Foundation - VaidyanathanShamik GhoshОценок пока нет
- QSAR Modeling TechniquesДокумент35 страницQSAR Modeling TechniquesBayu Mario GintingОценок пока нет
- Implementing Logic Gates Using Neural Networks (Part 1) - by Vedant Kumar - Analytics Vidhya - MediumДокумент3 страницыImplementing Logic Gates Using Neural Networks (Part 1) - by Vedant Kumar - Analytics Vidhya - Mediumhelen leeОценок пока нет
- Computer Science Important Question For Class 12 C++Документ24 страницыComputer Science Important Question For Class 12 C++Ravi singhОценок пока нет
- EXTRA QUESTIONS MotionДокумент3 страницыEXTRA QUESTIONS MotionhelloОценок пока нет
- History of Social Sciences in the PhilippinesДокумент19 страницHistory of Social Sciences in the PhilippinesHAZEL JANE ABAPOОценок пока нет
- Understanding Numbers: Numbers and Number LineДокумент30 страницUnderstanding Numbers: Numbers and Number LinerajatОценок пока нет
- Hanouts Sta304Документ191 страницаHanouts Sta304silence queenОценок пока нет
- The Undiscovered Self - Carl Gustav JungДокумент25 страницThe Undiscovered Self - Carl Gustav JungYusuf IrawanОценок пока нет
- SUPO UbD Geometry Gr10 JIsaacson WAPA-2012Документ13 страницSUPO UbD Geometry Gr10 JIsaacson WAPA-2012Sergio Cuautle JuarezОценок пока нет
- Theis Confined Aquifer Test AnalysisДокумент5 страницTheis Confined Aquifer Test AnalysisAlberto RicardoОценок пока нет
- Inverse Trigonometric Function (Exercise) Module-2Документ11 страницInverse Trigonometric Function (Exercise) Module-2Raju SinghОценок пока нет
- GR 9 Math Unit 1 Notes WebДокумент29 страницGR 9 Math Unit 1 Notes WebMohamed Ali100% (1)
- Perturbation theory explainedДокумент24 страницыPerturbation theory explainedDeepak SharmaОценок пока нет
- Convex FunctionsДокумент93 страницыConvex FunctionsAntonio Villagómez ChiluisaОценок пока нет
- Level Order Traversal Using Recursion in C++Документ4 страницыLevel Order Traversal Using Recursion in C++kartik mishraОценок пока нет
- Richard Swedberg - Social Mechanisms PDFДокумент353 страницыRichard Swedberg - Social Mechanisms PDFgiovaniОценок пока нет
- SSC CGL 75 Days Study Plan: Reasoning, Quant, GK, EnglishДокумент4 страницыSSC CGL 75 Days Study Plan: Reasoning, Quant, GK, EnglishShekhar YadavОценок пока нет
- Recall The Innis Investments Problem Chapter 2 Problem 39 Letting S Units Purchased in The PDFДокумент4 страницыRecall The Innis Investments Problem Chapter 2 Problem 39 Letting S Units Purchased in The PDFCharlotte0% (1)
- 15 Traveling Salesman Problem: AuthorДокумент25 страниц15 Traveling Salesman Problem: AuthorRama Krishna MuttavarapuОценок пока нет
- 7SR242 - Duobias Technical Manual Chapter 07 Applications GuideДокумент56 страниц7SR242 - Duobias Technical Manual Chapter 07 Applications GuideVishwanath TodurkarОценок пока нет
- Urban Renewal For Traditional Commercial Streets at - 2019 - Alexandria EngineeДокумент17 страницUrban Renewal For Traditional Commercial Streets at - 2019 - Alexandria EngineeAndika AhsanaОценок пока нет
- The Design, Analysis and Construction of Tensile Fabric StructuresДокумент26 страницThe Design, Analysis and Construction of Tensile Fabric Structurespradeep vermaОценок пока нет
- Reverse EngineeringbeginnersДокумент642 страницыReverse EngineeringbeginnersjramongvОценок пока нет
- DSP Lab Expt 3 EECE GITAM-19-23Документ5 страницDSP Lab Expt 3 EECE GITAM-19-23gowri thumburОценок пока нет