Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Methods of Linear Control TheoryДокумент20 страницMethods of Linear Control TheoryFawaz PartoОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Positioning System of A Pneumatic Actuator Driven by Proportional Pressure Regulator ValvesДокумент6 страницPositioning System of A Pneumatic Actuator Driven by Proportional Pressure Regulator ValvesFawaz PartoОценок пока нет
- IEEE ConferenceДокумент7 страницIEEE ConferenceFawaz PartoОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Modeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisДокумент7 страницModeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisFawaz PartoОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 10 1 1 41 1193Документ10 страниц10 1 1 41 1193Daniel SileshiОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- 10 1 1 24 4443 PDFДокумент27 страниц10 1 1 24 4443 PDFFawaz PartoОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Full Paper Mathematical Modelling Simulation and Experimental VerificationДокумент12 страницFull Paper Mathematical Modelling Simulation and Experimental VerificationFawaz PartoОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Mathematical Model of The Double Effect Telescopic Hydraulic DamperДокумент4 страницыMathematical Model of The Double Effect Telescopic Hydraulic DamperFawaz PartoОценок пока нет
- Nonlinear Control of An Inverted PendulumДокумент108 страницNonlinear Control of An Inverted PendulumFawaz PartoОценок пока нет
- Lec10 ControlДокумент33 страницыLec10 Controlammar120Оценок пока нет
- Lecture 5: Model-Free Control: David SilverДокумент43 страницыLecture 5: Model-Free Control: David SilverFawaz PartoОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Design and Finite Element Analysis of Double - Acting, Double - Ends Hydraulic Cylinder For Industrial Automation ApplicationДокумент8 страницDesign and Finite Element Analysis of Double - Acting, Double - Ends Hydraulic Cylinder For Industrial Automation ApplicationAJER JOURNALОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Xuetal Chapterrev4Документ28 страницXuetal Chapterrev4Fawaz PartoОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Lecture 37PNEUMATICS ACTUATORSДокумент43 страницыLecture 37PNEUMATICS ACTUATORSpratapy234Оценок пока нет
- ECE311S Dynamic Systems & Control: Course Notes by Bruce Francis January 2010Документ116 страницECE311S Dynamic Systems & Control: Course Notes by Bruce Francis January 2010Karam AlmasriОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Islamic FestivalsДокумент14 страницIslamic FestivalsFawaz Parto100% (1)
- Eeee PDFДокумент4 страницыEeee PDFFawaz PartoОценок пока нет
- ControlДокумент47 страницControlFawaz PartoОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Eeee PDFДокумент4 страницыEeee PDFFawaz PartoОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- NASA From Ping Lu Paper PDFДокумент41 страницаNASA From Ping Lu Paper PDFFawaz PartoОценок пока нет
- Coupled Spring PDFДокумент16 страницCoupled Spring PDFa_oucharОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- CND 013 08 081006 PDFДокумент7 страницCND 013 08 081006 PDFFawaz PartoОценок пока нет
- 0306419016669037Документ12 страниц0306419016669037Fawaz PartoОценок пока нет
- 4Документ9 страниц4Fawaz PartoОценок пока нет
- Eeee PDFДокумент4 страницыEeee PDFFawaz PartoОценок пока нет
- Aircraft Landing With Decelerated Approach (Longitudinal Movement Model)Документ6 страницAircraft Landing With Decelerated Approach (Longitudinal Movement Model)Fawaz PartoОценок пока нет
- Libro Astrom-Ch4 Control SystemsДокумент33 страницыLibro Astrom-Ch4 Control SystemsjuliolaurensОценок пока нет
- Lec02 2012eightДокумент5 страницLec02 2012eightPhạm Ngọc HòaОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- 2392 3302 PDFДокумент80 страниц2392 3302 PDFFawaz PartoОценок пока нет
- Aircraft RotorcraftДокумент26 страницAircraft Rotorcraftmoj33Оценок пока нет
- Maxstar140str (KK013519)Документ52 страницыMaxstar140str (KK013519)mrtans0% (1)
- A Simulation of Attempts To Influence Crowd Dynamics'Документ6 страницA Simulation of Attempts To Influence Crowd Dynamics'KhairulОценок пока нет
- How To Draw and Read Line Diagrams Onboard Ships?: ShareДокумент9 страницHow To Draw and Read Line Diagrams Onboard Ships?: ShareShaif uddin rifatОценок пока нет
- Comparison Between Zvs and ZVS-ZCS Bidirectional DДокумент6 страницComparison Between Zvs and ZVS-ZCS Bidirectional DSUNIL MANJHIОценок пока нет
- Safety Is Your Top Priority: Explosion-Proof LED LightingДокумент62 страницыSafety Is Your Top Priority: Explosion-Proof LED LightingPhi LongОценок пока нет
- Harmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesДокумент5 страницHarmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesJose GalvanОценок пока нет
- Raman Spectroscopy SetupДокумент13 страницRaman Spectroscopy SetupRafael RamosОценок пока нет
- Welding Procedure Specification: Material / Joints QualifiedДокумент2 страницыWelding Procedure Specification: Material / Joints QualifiedFernando LlontopОценок пока нет
- TN 1473Документ63 страницыTN 1473Meisam TabrizОценок пока нет
- PDS HEMPATEX ENAMEL 56360 en-GB PDFДокумент2 страницыPDS HEMPATEX ENAMEL 56360 en-GB PDFMohamed ChelfatОценок пока нет
- Elmer TutorialsДокумент65 страницElmer TutorialsmariomatoОценок пока нет
- FMS 2009 Question Paper and Answer KeyДокумент6 страницFMS 2009 Question Paper and Answer KeyHarish PotterОценок пока нет
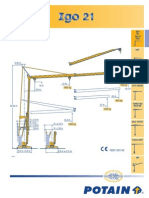
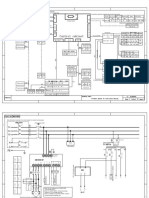
- Potain Igo 21 PDFДокумент4 страницыPotain Igo 21 PDFMarco CruzОценок пока нет
- Hitachi EX3600 Hydraulic Excavator PDFДокумент11 страницHitachi EX3600 Hydraulic Excavator PDFChaerul Umami100% (1)
- Guide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsДокумент12 страницGuide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsMauricio Javier León TejadaОценок пока нет
- Hydrocracking Reactor Temperature Control For Increased Safety, Reliability and PerformanceДокумент8 страницHydrocracking Reactor Temperature Control For Increased Safety, Reliability and Performancekirandevi1981Оценок пока нет
- "Part - I - General Central Services Group B'Документ13 страниц"Part - I - General Central Services Group B'NarayanaОценок пока нет
- Sigma Marine Coatings Manual - Part44Документ2 страницыSigma Marine Coatings Manual - Part44EngTamerОценок пока нет
- Building Applications in C# - InTLДокумент682 страницыBuilding Applications in C# - InTLMustehsan Armaghan Ghouri Magkacgck100% (1)
- A35 Ostetricia Ginecologia PDFДокумент8 страницA35 Ostetricia Ginecologia PDFAarthiОценок пока нет
- CND - Clinical Round ChecklistДокумент2 страницыCND - Clinical Round ChecklistMona Ismail AlsomaliОценок пока нет
- Hydraulics - Civil Engineering Questions and Answers Page 3Документ6 страницHydraulics - Civil Engineering Questions and Answers Page 3umairОценок пока нет
- Material Handling System and ASRS PDFДокумент13 страницMaterial Handling System and ASRS PDFHarsh PatelОценок пока нет
- Bavaria Reverse RdsДокумент15 страницBavaria Reverse RdsDušan JovanovićОценок пока нет
- Potsdam Village Police Dept. Blotter April 12, 2018Документ2 страницыPotsdam Village Police Dept. Blotter April 12, 2018NewzjunkyОценок пока нет
- 312 Excavators Hydraulic System: Component ListДокумент2 страницы312 Excavators Hydraulic System: Component ListRr hardiyantoОценок пока нет
- 2 Related Topics Automatic IrrigationДокумент13 страниц2 Related Topics Automatic IrrigationSftvsn Giovanni TandogОценок пока нет
- Wire Diagram Complete Elevator - SL ELEVATOR 20190805Документ23 страницыWire Diagram Complete Elevator - SL ELEVATOR 20190805Eka Rama100% (2)
- Training CoursesДокумент16 страницTraining CoursesFeroz KhanОценок пока нет
- BSM BWMP - D1 and D2Документ34 страницыBSM BWMP - D1 and D2Adnan DjamalОценок пока нет