Вам также может понравиться
- Hotel Reservation Form - Itqw2017Документ1 страницаHotel Reservation Form - Itqw2017ysnkyОценок пока нет
- ConvolutionДокумент8 страницConvolutionmehmetx28Оценок пока нет
- Mengclinic PosterДокумент1 страницаMengclinic PosterysnkyОценок пока нет
- ELP - Practical English Workshop12Документ1 страницаELP - Practical English Workshop12ysnkyОценок пока нет
- BLM343 Week 2Документ13 страницBLM343 Week 2ysnkyОценок пока нет
- Experimental Competition: Capacitive Displacement SensorДокумент4 страницыExperimental Competition: Capacitive Displacement SensorysnkyОценок пока нет
- Syllabus EEE351 Fall2012Документ2 страницыSyllabus EEE351 Fall2012ysnkyОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Sad Thesis Guidelines FinalsДокумент13 страницSad Thesis Guidelines FinalsJes RamosОценок пока нет
- Melter / Applicators: Modern Cracksealing TechnologyДокумент16 страницMelter / Applicators: Modern Cracksealing TechnologyEduardo RazerОценок пока нет
- Alketerge EДокумент4 страницыAlketerge EYohanes OktavianusОценок пока нет
- DR System ConciseДокумент37 страницDR System ConciseJiten KarmakarОценок пока нет
- Rockaway Beach Branch Community Impact StudyДокумент98 страницRockaway Beach Branch Community Impact StudyHanaRAlbertsОценок пока нет
- Nature of Acidity and Lime Requirement in Acid Soils of ManipurДокумент8 страницNature of Acidity and Lime Requirement in Acid Soils of ManipurIJASRETОценок пока нет
- Apache Oozie - A workflow scheduler to manage Hadoop jobsДокумент5 страницApache Oozie - A workflow scheduler to manage Hadoop jobsarjuncchaudharyОценок пока нет
- 25kl SS Tank EstimateДокумент1 страница25kl SS Tank EstimateRaja ManiОценок пока нет
- QUS 303 CONSTRUCTION ECONOMICSДокумент21 страницаQUS 303 CONSTRUCTION ECONOMICSjudexnams1on1Оценок пока нет
- Zener DataДокумент2 страницыZener Dataapi-27149887Оценок пока нет
- 3RInternational Tetzner Model Based Pipeline LDS 07-2003 PDFДокумент6 страниц3RInternational Tetzner Model Based Pipeline LDS 07-2003 PDFRene ParedesОценок пока нет
- How To Install GmtsarДокумент24 страницыHow To Install GmtsardedetmixОценок пока нет
- EGIG - 10th - Report - Final - 09-03-2018 - v1Документ50 страницEGIG - 10th - Report - Final - 09-03-2018 - v1Paulo Marcos Cabral JuniorОценок пока нет
- WPD Flotationdrying PDFДокумент19 страницWPD Flotationdrying PDFVvbjОценок пока нет
- Operating Instructions, FormulaДокумент35 страницOperating Instructions, FormulaandymulyonoОценок пока нет
- Boundary Layer Thickness and Heat Transfer CalculationsДокумент9 страницBoundary Layer Thickness and Heat Transfer Calculationsannie100% (1)
- Smart Structural Protective Packaging Design Approach For Handicrafts ProductsДокумент12 страницSmart Structural Protective Packaging Design Approach For Handicrafts ProductsNohaОценок пока нет
- Wacker Neuson-Dpu - 25 KNДокумент3 страницыWacker Neuson-Dpu - 25 KNMilutin BožovićОценок пока нет
- A320 Aircraft CharacteristicsДокумент387 страницA320 Aircraft CharacteristicsEder LucianoОценок пока нет
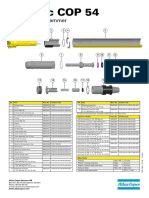
- 9853 1239 01 - COP 54 Service Poster - LOWДокумент1 страница9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasОценок пока нет
- WATCHДокумент9 страницWATCHGANTOROОценок пока нет
- DEA R ScriptsДокумент3 страницыDEA R ScriptsFrancisco SilvaОценок пока нет
- Filter DesignДокумент4 страницыFilter Designhassan11783Оценок пока нет
- QAДокумент170 страницQASudama KhatriОценок пока нет
- Advanced Data Structures and ImplementationДокумент56 страницAdvanced Data Structures and ImplementationSyam Prasad Reddy BattulaОценок пока нет
- 50TJДокумент56 страниц50TJHansen Henry D'souza100% (2)
- Department of Mechanical Engineering, Uet Lahore Refrigeration and Air Conditioning LaboratoryДокумент7 страницDepartment of Mechanical Engineering, Uet Lahore Refrigeration and Air Conditioning LaboratoryTauQeer ShahОценок пока нет
- Galvanize Galvanize Business Unit: Trust Us To GalvanizeДокумент6 страницGalvanize Galvanize Business Unit: Trust Us To GalvanizeAdet WildanОценок пока нет
- Estimating/ Construction Planning/ Scheduling and Programming/ Feasibility Project StudiesДокумент4 страницыEstimating/ Construction Planning/ Scheduling and Programming/ Feasibility Project StudiesVholts Villa VitugОценок пока нет
- Dimensions of Physical Quantities DensityДокумент100 страницDimensions of Physical Quantities DensityGerman Rincon UrregoОценок пока нет