Вам также может понравиться
- As350-200m-1 Rev 10 1-14-21Документ63 страницыAs350-200m-1 Rev 10 1-14-21Carolina Ross100% (1)
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferДокумент4 страницыSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangОценок пока нет
- Linear Convolution Vs Circular Convolution in The DFTДокумент4 страницыLinear Convolution Vs Circular Convolution in The DFTa_alok25100% (1)
- 92402Документ34 страницы92402anon_1937750530% (1)
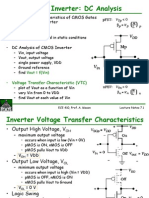
- CMOS Inverter: DC AnalysisДокумент32 страницыCMOS Inverter: DC Analysissreekanthreddy peram50% (2)
- Fourier TransformДокумент132 страницыFourier TransformAsif Noor100% (1)
- Key Issues in RF and RFIC Circuit Design PDFДокумент405 страницKey Issues in RF and RFIC Circuit Design PDFDorothy KirbyОценок пока нет
- IBM Case Manager, V5.0.0, Installation, Administration, and Development GuideДокумент500 страницIBM Case Manager, V5.0.0, Installation, Administration, and Development GuidesandeepklkОценок пока нет
- Atlas Dolog 20 Doppler Log Manual Skipper Dl1 Multi Is A Single Axis DopplerДокумент4 страницыAtlas Dolog 20 Doppler Log Manual Skipper Dl1 Multi Is A Single Axis Dopplersajujohny0% (3)
- Ezee ManualДокумент7 страницEzee ManualGeorge CălinОценок пока нет
- Z TransformДокумент59 страницZ Transformsathyasat2001100% (1)
- Z TransformДокумент21 страницаZ Transformadil1122100% (3)
- ROC Z TransformДокумент15 страницROC Z TransformMohammad Gulam Ahamad0% (1)
- Discrete Time SignalДокумент11 страницDiscrete Time Signaldheerajdb99Оценок пока нет
- Z TransformДокумент81 страницаZ TransformAlberto ManhuaОценок пока нет
- Principles of Electronic Communication Systems: Second EditionДокумент56 страницPrinciples of Electronic Communication Systems: Second EditionengaydiОценок пока нет
- Digital Signal Processing NotesДокумент12 страницDigital Signal Processing NotesDanial ZamanОценок пока нет
- HFSS Field CalculatorДокумент34 страницыHFSS Field Calculatorlevismith_367% (3)
- New Active FiltersДокумент73 страницыNew Active FiltersPradip GhorpadeОценок пока нет
- Lec10 - 11 Z-TransformДокумент72 страницыLec10 - 11 Z-TransformIndomi doubleОценок пока нет
- Sallen Key Low Pass FilterДокумент4 страницыSallen Key Low Pass FilterPhilip Caesar EbitОценок пока нет
- Operational Amplifier Circuits: o o o oДокумент21 страницаOperational Amplifier Circuits: o o o oVarun BishtОценок пока нет
- Fourier Series ExercisesДокумент1 страницаFourier Series ExercisesKarim Karim100% (1)
- 14.4 Bode Plots: Frequency Response 589Документ12 страниц14.4 Bode Plots: Frequency Response 589Luis Lizana100% (1)
- DSP Lab Manual Upto 3 Cycles PDFДокумент45 страницDSP Lab Manual Upto 3 Cycles PDFDinesh PalavalasaОценок пока нет
- Ece IV Signals & Systems (10ec44) AssignmentДокумент14 страницEce IV Signals & Systems (10ec44) AssignmentBlackArmy880% (1)
- Signal Flow GraphДокумент36 страницSignal Flow Graphveenadivyakish100% (1)
- Z TransformДокумент56 страницZ Transformcrux_123Оценок пока нет
- Antenna 5Документ30 страницAntenna 5Frederico MailaОценок пока нет
- Exercícios Extras (Em Inglês)Документ51 страницаExercícios Extras (Em Inglês)Rayner AugustoОценок пока нет
- Lab ManualДокумент50 страницLab ManualAniket BhowmikОценок пока нет
- Book Review of Communication System by Roy BlakeДокумент57 страницBook Review of Communication System by Roy BlakeDanny OxinaОценок пока нет
- 8051 Assembly Language ProgrammingДокумент35 страниц8051 Assembly Language ProgrammingavmapОценок пока нет
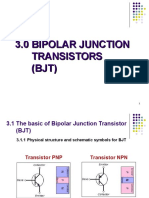
- Bipolar Junction Transistor (BJT)Документ45 страницBipolar Junction Transistor (BJT)RizalОценок пока нет
- Solution Control System Engineering Nagrath GopalДокумент2 страницыSolution Control System Engineering Nagrath Gopalganesharun123Оценок пока нет
- ME2142 Tut 2 SolnДокумент8 страницME2142 Tut 2 SolnLakshmi Balasubramaniam100% (1)
- Electronics 3: Active FiltersДокумент51 страницаElectronics 3: Active FiltersAdrian ZayasОценок пока нет
- EMF UNIT V WaveguidesДокумент98 страницEMF UNIT V Waveguidessravanti kanuguОценок пока нет
- UNIT-4 FinalДокумент70 страницUNIT-4 FinalanandbabugopathotiОценок пока нет
- Digital and Analog Communication SystemsДокумент2 страницыDigital and Analog Communication SystemsEmir AnthonyОценок пока нет
- CH 4 FFT PDFДокумент57 страницCH 4 FFT PDFArundhati ChaudhariОценок пока нет
- Designing A Lock-In Amplifier With Analog To Digital ConversionДокумент27 страницDesigning A Lock-In Amplifier With Analog To Digital Conversionessi12345Оценок пока нет
- Matched FilterДокумент20 страницMatched Filterhang leОценок пока нет
- Analog Modulation TechniquesДокумент66 страницAnalog Modulation Techniquespawan33% (3)
- H ParameterДокумент32 страницыH ParameterG.Kishore Kumar Asst. Professor, ECE DepartmentОценок пока нет
- Signals and SystemsДокумент15 страницSignals and SystemsAryan VermaОценок пока нет
- 16 IIR Filter DesignДокумент23 страницы16 IIR Filter DesignManisman ParidaОценок пока нет
- Chapter 15Документ10 страницChapter 15Yug VarshneyОценок пока нет
- Control System Question BankДокумент3 страницыControl System Question Bankmanish_iitrОценок пока нет
- DSPДокумент94 страницыDSPRasha Hassan0% (1)
- 100daysof RTL: Part-1 (Verilog)Документ54 страницы100daysof RTL: Part-1 (Verilog)SASОценок пока нет
- UNIT-1: Lecture Notes Unit 1: Transient AnalysisДокумент36 страницUNIT-1: Lecture Notes Unit 1: Transient AnalysisRamalingeswar JОценок пока нет
- Z TransformДокумент29 страницZ TransformRamadhuraiОценок пока нет
- Z-Transform: E) KT T (L Z eДокумент23 страницыZ-Transform: E) KT T (L Z enenusakОценок пока нет
- Filter Implementation and Evaluation Using MatlabДокумент14 страницFilter Implementation and Evaluation Using MatlabMatlabAsignmentExpertsОценок пока нет
- Filters .Antenna Switch .. What Are They?Документ5 страницFilters .Antenna Switch .. What Are They?Safdar IrfanОценок пока нет
- Lecture 1: Digital Control SystemsДокумент57 страницLecture 1: Digital Control SystemsMeer Zafarullah NoohaniОценок пока нет
- Diode and Its ApplicationsДокумент39 страницDiode and Its ApplicationsUsama SidhuОценок пока нет
- Electronic Engineering Applications of Two–Port Networks: Applied Electricity and Electronics DivisionОт EverandElectronic Engineering Applications of Two–Port Networks: Applied Electricity and Electronics DivisionОценок пока нет
- CS4230 Parallel Programming Introduction To Parallel AlgorithmsДокумент25 страницCS4230 Parallel Programming Introduction To Parallel Algorithmstt_aljobory3911Оценок пока нет
- EE 5223 Assn: - Date: - : Jyellajo@mtu - EduДокумент1 страницаEE 5223 Assn: - Date: - : Jyellajo@mtu - Edutt_aljobory3911Оценок пока нет
- Syllabus M.tech PSДокумент49 страницSyllabus M.tech PStt_aljobory3911Оценок пока нет
- 5223 SylДокумент1 страница5223 SylSaadAbdulBasitОценок пока нет
- EE593Документ4 страницыEE593hassanОценок пока нет
- CS4230 Parallel Programming: Mary Hall August 21, 2012Документ17 страницCS4230 Parallel Programming: Mary Hall August 21, 2012tt_aljobory3911Оценок пока нет
- CS4230 L3Документ27 страницCS4230 L3tt_aljobory3911Оценок пока нет
- San José State University College of Engineering Department of Electrical Engineering EE239 Smart Grid, Fall 2013Документ6 страницSan José State University College of Engineering Department of Electrical Engineering EE239 Smart Grid, Fall 2013tt_aljobory3911Оценок пока нет
- EE 378: Smart and Renewable Power: Course OutlineДокумент3 страницыEE 378: Smart and Renewable Power: Course Outlinett_aljobory3911Оценок пока нет
- EE379K/EE394V Smart Grids:: Ross Baldick, Department of Electrical and Computer Engineering Spring 2017Документ9 страницEE379K/EE394V Smart Grids:: Ross Baldick, Department of Electrical and Computer Engineering Spring 2017tt_aljobory3911Оценок пока нет
- San José State University College of Engineering Department of Electrical Engineering EE239 Smart Grid, Fall 2013Документ6 страницSan José State University College of Engineering Department of Electrical Engineering EE239 Smart Grid, Fall 2013tt_aljobory3911Оценок пока нет
- EE593Документ4 страницыEE593hassanОценок пока нет
- EE 378: Smart and Renewable Power: Course OutlineДокумент3 страницыEE 378: Smart and Renewable Power: Course Outlinett_aljobory3911Оценок пока нет
- Z TransformДокумент20 страницZ TransformMxaz MyzxОценок пока нет
- Case 1:-Fixed Subnet MaskДокумент6 страницCase 1:-Fixed Subnet Masktt_aljobory3911Оценок пока нет
- 01 Architecture 1Документ45 страниц01 Architecture 1tt_aljobory3911Оценок пока нет
- 3 Authors IndexДокумент11 страниц3 Authors Indextt_aljobory3911Оценок пока нет
- 2-Table of ContentsДокумент10 страниц2-Table of Contentstt_aljobory3911Оценок пока нет
- Problem Set 2Документ1 страницаProblem Set 2tt_aljobory3911Оценок пока нет
- 4 PublicationДокумент6 страниц4 Publicationtt_aljobory3911Оценок пока нет
- 2017 E-Health and Bioengineering Conference (EHB)Документ2 страницы2017 E-Health and Bioengineering Conference (EHB)tt_aljobory3911Оценок пока нет
- Publication 4 18108 6175Документ5 страницPublication 4 18108 6175tt_aljobory3911Оценок пока нет
- 6 PDFДокумент4 страницы6 PDFtt_aljobory3911Оценок пока нет
- CIS197-12b Fall - SyllabusДокумент4 страницыCIS197-12b Fall - Syllabustt_aljobory3911Оценок пока нет
- IC Design of Power Management Circuits (I)Документ40 страницIC Design of Power Management Circuits (I)tt_aljobory3911Оценок пока нет
- Midterm1 PDFДокумент3 страницыMidterm1 PDFtt_aljobory3911Оценок пока нет
- Sample Midterm 1Документ3 страницыSample Midterm 1tt_aljobory3911Оценок пока нет
- Due: November 7, 2002 Reading: ECE 445 Analysis and Design of Power Electronic Circuits Problem Set 7 Fall 2002Документ1 страницаDue: November 7, 2002 Reading: ECE 445 Analysis and Design of Power Electronic Circuits Problem Set 7 Fall 2002tt_aljobory3911Оценок пока нет
- 11 EE462L H Bridge InverterДокумент5 страниц11 EE462L H Bridge Invertertt_aljobory3911Оценок пока нет
- CH 2 SlideДокумент45 страницCH 2 Slidemukesh00007Оценок пока нет
- EdgeCAM Advanced MillingДокумент111 страницEdgeCAM Advanced MillingRodrigo Luiz100% (1)
- Doosan DMS3.pdf CodesДокумент2 страницыDoosan DMS3.pdf CodesHelder BarrosОценок пока нет
- The Visual LISP EditorДокумент192 страницыThe Visual LISP Editorloopback127xyzОценок пока нет
- Wireless Local Area Network (WLAN)Документ48 страницWireless Local Area Network (WLAN)Ali AhmadОценок пока нет
- Signal Analysis: 1.1 Analogy of Signals With VectorsДокумент29 страницSignal Analysis: 1.1 Analogy of Signals With VectorsRamachandra ReddyОценок пока нет
- All About FTP Must ReadДокумент7 страницAll About FTP Must ReadPINOY EUTSECОценок пока нет
- Guia LCD Samsung Gama de 2010 Le32c530f1wДокумент231 страницаGuia LCD Samsung Gama de 2010 Le32c530f1wJoao Filipe DuarteОценок пока нет
- Electric Motor Voltage: Chapter 1: Fundamentals of Electric DrivesДокумент17 страницElectric Motor Voltage: Chapter 1: Fundamentals of Electric DrivesRAJOLI GIRISAI MADHAVОценок пока нет
- 10 Chapter10 153-165Документ13 страниц10 Chapter10 153-165api-258749062Оценок пока нет
- Introduction To C++Документ306 страницIntroduction To C++Syed Zulqadar HassanОценок пока нет
- AirWatch On-Premise Technical Architecture Guide v7 - 3Документ19 страницAirWatch On-Premise Technical Architecture Guide v7 - 3OscarОценок пока нет
- Recurrent Neural Networks: Anahita Zarei, PH.DДокумент37 страницRecurrent Neural Networks: Anahita Zarei, PH.DNickОценок пока нет
- Ovs PDFДокумент17 страницOvs PDFRakesh RaparthiОценок пока нет
- Experiment - 1: Write A Program For 16 Bit Arithmetic Operations For 8086 (Using Various Addressing Modes) I) - Addition of Two 8-Bit NumbersДокумент8 страницExperiment - 1: Write A Program For 16 Bit Arithmetic Operations For 8086 (Using Various Addressing Modes) I) - Addition of Two 8-Bit Numbersneha yarrapothuОценок пока нет
- Studio Monitors Gear Guide 2013Документ24 страницыStudio Monitors Gear Guide 2013Artist Recording100% (2)
- XX X XXXX XX XXXX - Tank Foundation 45m Dia X 25m High On Earthen Bund FoundationДокумент44 страницыXX X XXXX XX XXXX - Tank Foundation 45m Dia X 25m High On Earthen Bund FoundationKhairul JaggerОценок пока нет
- DSE4210 DSE4220 Operators Manual PDFДокумент42 страницыDSE4210 DSE4220 Operators Manual PDFLeo BurnsОценок пока нет
- Young Childrens Play in Online Virtual WorldsДокумент18 страницYoung Childrens Play in Online Virtual WorldsMKivaОценок пока нет
- SQL Server: Lecture 6 - Select Statement - Multiple CriteriaДокумент28 страницSQL Server: Lecture 6 - Select Statement - Multiple CriteriaBindu Devender MahajanОценок пока нет
- List of JournlsДокумент1 страницаList of JournlsNaveen ISESJBITОценок пока нет
- Smooth Start of Single Phase Induction Motor: Project Seminar OnДокумент11 страницSmooth Start of Single Phase Induction Motor: Project Seminar OnMayur Pote100% (1)
- Usermanual Amiko HD8200-8300-8820 Common EN v120203 Web PDFДокумент46 страницUsermanual Amiko HD8200-8300-8820 Common EN v120203 Web PDFPredrag Zivkovic100% (1)
- ReadmeДокумент2 страницыReadmeMijić NikolinaОценок пока нет
- Mes3083 Set 1 PDFДокумент7 страницMes3083 Set 1 PDFAhmad SolihuddinОценок пока нет
- Cnt-Fet A ReviewДокумент5 страницCnt-Fet A ReviewEr Ashish BahetiОценок пока нет
- Internet of Things (IoT) Module 1Документ37 страницInternet of Things (IoT) Module 1Richa TengsheОценок пока нет