Вам также может понравиться
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingОт EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingОценок пока нет
- Highlighted OVPAM PaperДокумент9 страницHighlighted OVPAM Papermb.farooqui02Оценок пока нет
- An Omni-Directional Wall-Climbing Microrobot With Magnetic Wheels Directly Integrated With Electromagnetic MicromotorsДокумент9 страницAn Omni-Directional Wall-Climbing Microrobot With Magnetic Wheels Directly Integrated With Electromagnetic MicromotorsDreadful ParagonОценок пока нет
- Zhou Et Al 2020 Guided Electrokinetic Assembly of Polystyrene Microbeads Onto Photopatterned Carbon Electrode ArraysДокумент10 страницZhou Et Al 2020 Guided Electrokinetic Assembly of Polystyrene Microbeads Onto Photopatterned Carbon Electrode ArraysTuo ZhouОценок пока нет
- "The Hybrid Boat System": Rohit Kumawat, Ravi Sain, Trilok Meena, Abhishek BhargavДокумент2 страницы"The Hybrid Boat System": Rohit Kumawat, Ravi Sain, Trilok Meena, Abhishek Bhargavanil kasotОценок пока нет
- Toward Controlled Flight of The Ionocraft A Flying Microrobot Using Electrohydrodynamic Thrust With Onboard Sensing and No Moving PartsДокумент7 страницToward Controlled Flight of The Ionocraft A Flying Microrobot Using Electrohydrodynamic Thrust With Onboard Sensing and No Moving PartsFrank ToralbaОценок пока нет
- Varona 2009Документ6 страницVarona 2009Đức HiếuОценок пока нет
- An Electrostatic Gecko Inspired Adhesives Soft Robotic GripperДокумент8 страницAn Electrostatic Gecko Inspired Adhesives Soft Robotic Gripperjennifer yipОценок пока нет
- A Review in ElectrospinningДокумент8 страницA Review in ElectrospinningMuaathe IbrahimОценок пока нет
- Vdma 442 T. Klenk Et Al. Conductive SimmerringsДокумент7 страницVdma 442 T. Klenk Et Al. Conductive SimmerringsChandrasekar KrishnamurthyОценок пока нет
- A Scalable Solution To Harvest Kinetic Energy: Roy D. Kornbluh, Joseph Eckerle, and Brian MccoyДокумент3 страницыA Scalable Solution To Harvest Kinetic Energy: Roy D. Kornbluh, Joseph Eckerle, and Brian MccoydaskhagoОценок пока нет
- Piezoelectric Effect - Smart Roads in Green Energy HarvestingДокумент5 страницPiezoelectric Effect - Smart Roads in Green Energy HarvestingRubia IftikharОценок пока нет
- Elektropredenje Postopek Izdelave Nanovlaken PDFДокумент9 страницElektropredenje Postopek Izdelave Nanovlaken PDFAsif Fareed QaisraniОценок пока нет
- Modeling of Electrodynamic Bearings: Nicola Amati Xavier de Lépine Andrea TonoliДокумент9 страницModeling of Electrodynamic Bearings: Nicola Amati Xavier de Lépine Andrea TonoliDávid RúraОценок пока нет
- Piezoelectric Crystals: Future Source of Electricity: Pramathesh.T, Ankur.SДокумент3 страницыPiezoelectric Crystals: Future Source of Electricity: Pramathesh.T, Ankur.SnareshОценок пока нет
- Ultra-Low Voltage Electrowetting Using Graphite SurfacesДокумент7 страницUltra-Low Voltage Electrowetting Using Graphite SurfacesPallav KantОценок пока нет
- A High Force Low Area MEMS Thermal ActuatorДокумент6 страницA High Force Low Area MEMS Thermal ActuatorsolarprismОценок пока нет
- Performance and Behavior Analysis of Piezoelectric Energy Harvesting Floor TilesДокумент4 страницыPerformance and Behavior Analysis of Piezoelectric Energy Harvesting Floor TilesJustin LanuzaОценок пока нет
- Electric Field Simulation of Polluted Insulator On EMU RoofДокумент5 страницElectric Field Simulation of Polluted Insulator On EMU Roofdemy antonyОценок пока нет
- Electrochromic Prussian Blue Thin Films - MRSEC Education Group - UW-MadisonДокумент15 страницElectrochromic Prussian Blue Thin Films - MRSEC Education Group - UW-MadisonAssya AmhaouChОценок пока нет
- Wang Et Al.-2023-Constructing Spike-Like Energy Band Alignment at The Heterointerface in Highly Efficient Perovskite Solar CellsДокумент10 страницWang Et Al.-2023-Constructing Spike-Like Energy Band Alignment at The Heterointerface in Highly Efficient Perovskite Solar CellsLIN XIEОценок пока нет
- Biometric Adhesive SystemДокумент9 страницBiometric Adhesive SystemVansala GanesanОценок пока нет
- Relazione 1 WordДокумент7 страницRelazione 1 WordGiulia GiuffridaОценок пока нет
- EScholarship UC Item 2fk4h0f8Документ8 страницEScholarship UC Item 2fk4h0f8Karthik GaneshОценок пока нет
- EgbertZoger2019 DwipolarДокумент32 страницыEgbertZoger2019 Dwipolardilla zainudinОценок пока нет
- Mini Project ReportДокумент20 страницMini Project Reportroks143Оценок пока нет
- Insights Into The Complex Prebreakdown Actuation of Silicone Elastomers and Its in Uence On Breakdown BehaviorДокумент10 страницInsights Into The Complex Prebreakdown Actuation of Silicone Elastomers and Its in Uence On Breakdown BehaviorAliirshad10Оценок пока нет
- Experimental Characterization of High Tolerance ToДокумент17 страницExperimental Characterization of High Tolerance Tojhle01394Оценок пока нет
- Eddy Current Damping For Magnetic Levitation: Downscaling From Macro-To Micro-LevitationДокумент8 страницEddy Current Damping For Magnetic Levitation: Downscaling From Macro-To Micro-LevitationALEX sponsoredОценок пока нет
- ActuatorsДокумент13 страницActuatorsLeonardo CozaciucОценок пока нет
- Design and Fabrication of Eddy Current BДокумент6 страницDesign and Fabrication of Eddy Current BMOHAN RAJ NОценок пока нет
- Power Shirt: - Generates Watts As You WalkДокумент6 страницPower Shirt: - Generates Watts As You Walkmanu_12345Оценок пока нет
- p37 PDFДокумент8 страницp37 PDFDiagsysLrpeОценок пока нет
- Em ThrusterДокумент12 страницEm ThrusterJoseph FlemingОценок пока нет
- Surface Tension Based Adhesion DeviceДокумент6 страницSurface Tension Based Adhesion DeviceVashwar RoufОценок пока нет
- Application of Efficiency Technology in EV Drive Systems and Regenerative BrakingДокумент3 страницыApplication of Efficiency Technology in EV Drive Systems and Regenerative BrakingInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Micro Electret Power GeneratorДокумент5 страницMicro Electret Power GeneratorOmkar DashОценок пока нет
- Rysi Observation SheetДокумент5 страницRysi Observation SheetSofiur RahmanОценок пока нет
- Experimental and Numerical Studies of A Soft Impact Piezoelectric Energy Harvesting Using An MR FluidДокумент10 страницExperimental and Numerical Studies of A Soft Impact Piezoelectric Energy Harvesting Using An MR FluidOleksii BalitskyiОценок пока нет
- 2017 - Reconfigurable Metasurface For Multifunctional Control of Electromagnetic WavesДокумент6 страниц2017 - Reconfigurable Metasurface For Multifunctional Control of Electromagnetic Wavesab4azizОценок пока нет
- Ultra 11Документ8 страницUltra 11Raj RajОценок пока нет
- K A H S B M: Sonicmems Laboratory, Department of Electrical and Computer EngineeringДокумент4 страницыK A H S B M: Sonicmems Laboratory, Department of Electrical and Computer EngineeringdenghueiОценок пока нет
- 264 4 FullДокумент3 страницы264 4 FullSandeep KaushikОценок пока нет
- Bladeless Wind Power Generation6Документ7 страницBladeless Wind Power Generation6Megha LakhawatОценок пока нет
- C CC C: CCCCCДокумент13 страницC CC C: CCCCCAjith KrishnanОценок пока нет
- Adv Funct Materials - 2001 - Brabec - Plastic Solar CellsДокумент12 страницAdv Funct Materials - 2001 - Brabec - Plastic Solar CellsFrancois BornmanОценок пока нет
- Principles of A Permanent-Magnet Axial-Field D.CДокумент6 страницPrinciples of A Permanent-Magnet Axial-Field D.CHoang Hoang LeОценок пока нет
- A Solution For The Stabilization of Electrodynamic Bearings - Modeling and Experimental ValidationДокумент10 страницA Solution For The Stabilization of Electrodynamic Bearings - Modeling and Experimental ValidationweishuochihОценок пока нет
- ASSIGNMENTДокумент4 страницыASSIGNMENTGedrich HombreОценок пока нет
- Research Papers Characterization of A Next-Generation Piezo Bimorph X-Ray Mirror For Synchrotron BeamlinesДокумент6 страницResearch Papers Characterization of A Next-Generation Piezo Bimorph X-Ray Mirror For Synchrotron Beamlinesrajeev_kumar365Оценок пока нет
- Ultra Thin Ultr-Wide Band AbsorberДокумент4 страницыUltra Thin Ultr-Wide Band AbsorberPunyatoya RautarayОценок пока нет
- Jaewan KIM Electroactive Paper: Piezo Nanopositioners Electric Actuator Guide Piezo and PiezoproductsДокумент8 страницJaewan KIM Electroactive Paper: Piezo Nanopositioners Electric Actuator Guide Piezo and PiezoproductsklausОценок пока нет
- Tutorial Overview of Flywheel Energy Storage in A Photovoltaic PДокумент4 страницыTutorial Overview of Flywheel Energy Storage in A Photovoltaic Pfaqih subyktoОценок пока нет
- Calculation of Self and Mutual Impedances in Planar Magnetic StructuresДокумент7 страницCalculation of Self and Mutual Impedances in Planar Magnetic Structuressongzheng chenОценок пока нет
- GT-4 - Performance Evaluation of 8-cm Diameter Ion Optics Assemblies Fabricated From Carbon-Carbon CompositesДокумент14 страницGT-4 - Performance Evaluation of 8-cm Diameter Ion Optics Assemblies Fabricated From Carbon-Carbon CompositesTOP 10Оценок пока нет
- 1 s2.0 S1877050919312256 MainДокумент6 страниц1 s2.0 S1877050919312256 MainMichael AbrahaОценок пока нет
- STNM 5Документ41 страницаSTNM 5BME62Thejeswar SeggamОценок пока нет
- Vortex Bladeless Wind TurbineДокумент17 страницVortex Bladeless Wind TurbineFahad AhamedОценок пока нет
- Electro Masgnetic Propulsion System PDFДокумент2 страницыElectro Masgnetic Propulsion System PDFfsilassie8012Оценок пока нет
- Case ReportДокумент10 страницCase ReportgremlinglitchОценок пока нет
- Economy AppendicesДокумент1 страницаEconomy AppendicesgremlinglitchОценок пока нет
- Case ReportДокумент10 страницCase Reportgremlinglitch100% (2)
- MCT 3332 Sensor ProjectДокумент8 страницMCT 3332 Sensor ProjectgremlinglitchОценок пока нет
- Translating Orcad Layout Designs Using The Cadence Orcad and Allegro PCB Editors Rev A PDFДокумент12 страницTranslating Orcad Layout Designs Using The Cadence Orcad and Allegro PCB Editors Rev A PDFgem1144aaОценок пока нет
- CET Power - AGIL Tri-Mono Datasheet v1.3Документ2 страницыCET Power - AGIL Tri-Mono Datasheet v1.3jokotsОценок пока нет
- BL Bosch Abs 5.3 PDFДокумент32 страницыBL Bosch Abs 5.3 PDFVikanshu bansal100% (1)
- Methods of Diameter Determination (08!23!06)Документ11 страницMethods of Diameter Determination (08!23!06)olarykОценок пока нет
- Weidmann Linkboard: For Dual Voltage Power TransformersДокумент2 страницыWeidmann Linkboard: For Dual Voltage Power TransformersSunil GurubaxaniОценок пока нет
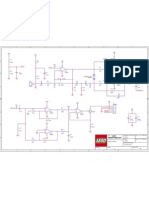
- Appendix 4-LEGO Mind Storms NXT Sound Sensor Hardware SchematicДокумент1 страницаAppendix 4-LEGO Mind Storms NXT Sound Sensor Hardware SchematicAlfon DeLerín100% (1)
- Fundamentals of Microprocessor 8085: Multiple Choice QuestionsДокумент21 страницаFundamentals of Microprocessor 8085: Multiple Choice Questionsraghavrocks89Оценок пока нет
- Technics Turntable SL-B200 Operating InstructionsДокумент6 страницTechnics Turntable SL-B200 Operating InstructionsHana BernardОценок пока нет
- Setup WizardДокумент11 страницSetup WizardMarlon CameyОценок пока нет
- Motor Protection Selection TablesДокумент1 страницаMotor Protection Selection TablesCharlie MartinezОценок пока нет
- Exz110 enДокумент242 страницыExz110 enMiguel SanchezОценок пока нет
- TPCA8019-H: High-Efficiency DC/DC Converter Applications Notebook PC Applications Portable Equipment ApplicationsДокумент7 страницTPCA8019-H: High-Efficiency DC/DC Converter Applications Notebook PC Applications Portable Equipment ApplicationsHumberto Trujillo OrtizОценок пока нет
- Rfid Reader Rs 232Документ11 страницRfid Reader Rs 232Varun Sankar SОценок пока нет
- Play FormДокумент74 страницыPlay FormŠejla Nurković100% (1)
- Copy of ELECTRICAL BOQДокумент12 страницCopy of ELECTRICAL BOQdesignselvaОценок пока нет
- TGS 6 - Backpropagation-18.01.53.0065Документ2 страницыTGS 6 - Backpropagation-18.01.53.0065Ki JahsehОценок пока нет
- Pae Transmitter Type t6t User GuideДокумент75 страницPae Transmitter Type t6t User Guidecmge_2005100% (1)
- Design Solar SystemДокумент11 страницDesign Solar Systemjames ramОценок пока нет
- 03 Passat Wiring Diagrams PDFДокумент45 страниц03 Passat Wiring Diagrams PDFEsther KoltermanОценок пока нет
- Ale Data PDFДокумент5 страницAle Data PDFettorreit100% (1)
- Sweep Frequency Response Analyzer: Frax 99Документ5 страницSweep Frequency Response Analyzer: Frax 99Ajit KumarОценок пока нет
- EXP8 Frequencyresponse StudentsДокумент4 страницыEXP8 Frequencyresponse StudentslucasОценок пока нет
- Pioneer PDP 5071 5070pu Arp 3354Документ219 страницPioneer PDP 5071 5070pu Arp 3354Dan Prewitt100% (1)
- Manoj Updated CVДокумент5 страницManoj Updated CVArun TiwariОценок пока нет
- Deshielo Tarjetas MabeДокумент22 страницыDeshielo Tarjetas Mabevictor5everardo5ramiОценок пока нет
- AVSU Area ValveДокумент2 страницыAVSU Area ValveRobert_Hegedus_1642Оценок пока нет
- User's Manual: EnglishДокумент96 страницUser's Manual: Englishmarco_meza_16Оценок пока нет
- Eee 226 Microprocessor I ProposalДокумент3 страницыEee 226 Microprocessor I Proposal楊傑克Оценок пока нет
- RmctoolsДокумент1 618 страницRmctoolsDiego Alejandro Gallardo IbarraОценок пока нет
- Murata Power Supply Noise Suppression & Decoupling For Digital ICs Application ManualДокумент85 страницMurata Power Supply Noise Suppression & Decoupling For Digital ICs Application Manualkn65238859Оценок пока нет