Вам также может понравиться
- Bee Unit4 Lecture1Документ6 страницBee Unit4 Lecture1rohityaduvanshirrОценок пока нет
- 4 5814692296314062904Документ76 страниц4 5814692296314062904Dagim KumilachewОценок пока нет
- Chapter 3 Induction Motor PDFДокумент26 страницChapter 3 Induction Motor PDFNeezam Halim50% (2)
- Chapter Three Three Phase Induction Motors: 3-1 IntroductionДокумент10 страницChapter Three Three Phase Induction Motors: 3-1 IntroductionMohammed Dyhia AliОценок пока нет
- Three Phase Induction MotorsДокумент22 страницыThree Phase Induction MotorsSabiha MahbubОценок пока нет
- Three-Phase Induction Motor Part-1Документ49 страницThree-Phase Induction Motor Part-1soumik Rayhan100% (1)
- Unit1 Three Phase Induction MotorДокумент36 страницUnit1 Three Phase Induction MotorPalak JioОценок пока нет
- Ind MachinesДокумент23 страницыInd MachinesHareesh MadathilОценок пока нет
- Step by Step Development of Equivalent Circuit of Induction MotorДокумент11 страницStep by Step Development of Equivalent Circuit of Induction MotornandhakumarmeОценок пока нет
- MODULE 4 - Induction MachineДокумент35 страницMODULE 4 - Induction MachinedamoskidanielОценок пока нет
- Unit 3 Three Phase Induction MotorДокумент14 страницUnit 3 Three Phase Induction Motorkrishna Sai Atla VenkataОценок пока нет
- Hase Nduction Achines: Aculty of Ngineering NvironmentДокумент10 страницHase Nduction Achines: Aculty of Ngineering NvironmentMonika VaitulionytėОценок пока нет
- 1 Single-Phase Motor 2020Документ22 страницы1 Single-Phase Motor 2020SerajОценок пока нет
- Module 4 AC MachinesДокумент19 страницModule 4 AC MachinesAffan KhanОценок пока нет
- Synchronous Machine Theory and ModelingДокумент108 страницSynchronous Machine Theory and Modelingnanavarasmdu100% (1)
- By: Dr. Salah Eldeen GasimДокумент31 страницаBy: Dr. Salah Eldeen Gasimomar meroОценок пока нет
- Chapter 4 Chapter 4 Chapter 4 Chapter 4 PDFДокумент37 страницChapter 4 Chapter 4 Chapter 4 Chapter 4 PDFWellin SamboОценок пока нет
- Taken From Course Structure 3 Phase Induction MachinesДокумент18 страницTaken From Course Structure 3 Phase Induction MachinesSyed Ahmed MasoodОценок пока нет
- Three-Phase Induction Motor Part-1Документ49 страницThree-Phase Induction Motor Part-1Kazi Newaj FaisalОценок пока нет
- Chapter3 Inductionmachine 110625084515 Phpapp01Документ25 страницChapter3 Inductionmachine 110625084515 Phpapp01Ibrahim HussainОценок пока нет
- Chapter 9 AC MachinesДокумент5 страницChapter 9 AC MachinesJACOB MUDONHIОценок пока нет
- Unit-4 Induction MotorsДокумент26 страницUnit-4 Induction MotorsAnurag Singhal0% (1)
- Induction MachineДокумент40 страницInduction MachineJunior heroОценок пока нет
- Three-Phase Motor BasicsДокумент10 страницThree-Phase Motor BasicsAtharv BhedaОценок пока нет
- Polyphase Induction MotorДокумент38 страницPolyphase Induction MotorSaad KhaliqОценок пока нет
- Chapter Four Three Phase Induction Machine: Squirrel-Cage, Wound-Rotor Ranging From A Few Horsepower ToДокумент67 страницChapter Four Three Phase Induction Machine: Squirrel-Cage, Wound-Rotor Ranging From A Few Horsepower ToTawanda MabachoОценок пока нет
- Induction MachinesДокумент11 страницInduction MachinesTayyab HussainОценок пока нет
- Drives and Control Unit 2Документ25 страницDrives and Control Unit 2Shailesh KshatriyaОценок пока нет
- Parameter Estimation of Three Phase Induction Motor An Innovative Approach ThesisДокумент58 страницParameter Estimation of Three Phase Induction Motor An Innovative Approach ThesisIrfan Ashraf0% (1)
- Iare Acm Lecture NotesДокумент126 страницIare Acm Lecture NotesAriel Ombajen MentawanОценок пока нет
- Week 71Документ25 страницWeek 71Raphael SebucОценок пока нет
- Experiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveДокумент3 страницыExperiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveKristine AldayОценок пока нет
- Topic 1Документ20 страницTopic 1Ʋiŋêet ḠåuṯḁmОценок пока нет
- Three Phase Induction MotorДокумент29 страницThree Phase Induction MotorAnirban SarkarОценок пока нет
- Three Phase Induction MotorДокумент89 страницThree Phase Induction MotorTHE ROCKОценок пока нет
- Ece3414.7induction Machines IДокумент18 страницEce3414.7induction Machines IwillycanОценок пока нет
- Three Phase Induction Motor FundamentalsДокумент3 страницыThree Phase Induction Motor FundamentalsDhanashree ParanjapeОценок пока нет
- Three Phase Induction Motors PDFДокумент67 страницThree Phase Induction Motors PDFanunilaОценок пока нет
- Induction MotorsДокумент47 страницInduction MotorsPurushothaman KannanОценок пока нет
- UNIT 7 AlternatorsДокумент8 страницUNIT 7 AlternatorsPadmavathi ShenoyОценок пока нет
- Chapter3 InductionmachineДокумент25 страницChapter3 InductionmachineAbhijitОценок пока нет
- Chapter 3 Induction MotorДокумент21 страницаChapter 3 Induction Motorahmed aliОценок пока нет
- Motors and LoadsДокумент24 страницыMotors and Loadsmanukjoy007Оценок пока нет
- 3 Phase Induction Motor ConstructionДокумент25 страниц3 Phase Induction Motor ConstructionsunilkumareceОценок пока нет
- Unit8-Induction MotorДокумент40 страницUnit8-Induction MotorsaravananОценок пока нет
- Bee Exp10Документ4 страницыBee Exp10pranaybhandare765Оценок пока нет
- ELE290 Induction Motor GuideДокумент21 страницаELE290 Induction Motor GuideHarizx SaufixОценок пока нет
- A.C. MachineДокумент32 страницыA.C. MachinehayikОценок пока нет
- Optimum Motor Protection en - LIBROДокумент80 страницOptimum Motor Protection en - LIBROEdgardo Kat ReyesОценок пока нет
- GRP No.1 El-P-MachineryДокумент12 страницGRP No.1 El-P-MachineryYasin OmaryОценок пока нет
- Microsoft Word - 4 - Induction Machines PDFДокумент16 страницMicrosoft Word - 4 - Induction Machines PDFMegat Ahmad FaizОценок пока нет
- Chapter 3 Induction MachineДокумент25 страницChapter 3 Induction MachineWei HanОценок пока нет
- FIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)Документ32 страницыFIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)starboyОценок пока нет
- A New System of Alternating Current Motors and Transformers and Other EssaysОт EverandA New System of Alternating Current Motors and Transformers and Other EssaysРейтинг: 5 из 5 звезд5/5 (1)
- A New System of Alternating Current Motors and TransformersОт EverandA New System of Alternating Current Motors and TransformersРейтинг: 1 из 5 звезд1/5 (1)
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsОт EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsОценок пока нет
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsОт EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsОценок пока нет
- Proposed Area of Research Maximum Power Point Tracking Under Partial Shading Conditions For Solar Photovoltaic SystemsДокумент1 страницаProposed Area of Research Maximum Power Point Tracking Under Partial Shading Conditions For Solar Photovoltaic SystemsB ANIL KUMARОценок пока нет
- LST H4Документ46 страницLST H4B ANIL KUMARОценок пока нет
- Control Systems Mcq'sДокумент33 страницыControl Systems Mcq'sB ANIL KUMARОценок пока нет
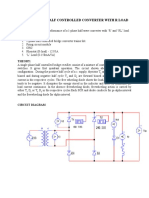
- Single Phase Half Controlled Converter With R LoadДокумент3 страницыSingle Phase Half Controlled Converter With R LoadB ANIL KUMARОценок пока нет
- Elect Ckt-Session PlanДокумент5 страницElect Ckt-Session PlanB ANIL KUMARОценок пока нет
- Gate Firing Circuits For SCR'S R-C Triggering CircuitДокумент3 страницыGate Firing Circuits For SCR'S R-C Triggering CircuitB ANIL KUMARОценок пока нет
- Chapter 6Документ4 страницыChapter 6Indu SusmiОценок пока нет
- Unit-3 Ac-Ac ConvertersДокумент8 страницUnit-3 Ac-Ac ConvertersB ANIL KUMARОценок пока нет
- 3.DC MotorsДокумент3 страницы3.DC MotorsB ANIL KUMARОценок пока нет
- What Is Power Electronics?: 1957 1900 Late 1980s Mid 1970sДокумент12 страницWhat Is Power Electronics?: 1957 1900 Late 1980s Mid 1970sB ANIL KUMARОценок пока нет
- Unit-2 Ac - DC ConvertersДокумент10 страницUnit-2 Ac - DC ConvertersB ANIL KUMARОценок пока нет
- Induction MotorДокумент28 страницInduction MotorB ANIL KUMARОценок пока нет
- The Effect of Heat On Matter (Melting&Freezing) .Ppt2Документ17 страницThe Effect of Heat On Matter (Melting&Freezing) .Ppt2Farah Dinah HassanОценок пока нет
- Gel Content & Peel Test: Benjamin Lippke, Romain PénidonДокумент14 страницGel Content & Peel Test: Benjamin Lippke, Romain PénidonKarthikeyanKarthikОценок пока нет
- EEDC DetailДокумент21 страницаEEDC DetailAfrian HindrawijayaОценок пока нет
- 5070 w09 QP 1Документ16 страниц5070 w09 QP 1mstudy123456Оценок пока нет
- Low Voltage Capacitors For Improved Power Quality: Produc T BrochureДокумент20 страницLow Voltage Capacitors For Improved Power Quality: Produc T BrochureJuan Alberto Cayetano GomezОценок пока нет
- 2017 Facilities Standards (P100) PDFДокумент358 страниц2017 Facilities Standards (P100) PDFBhingle Abellera100% (1)
- HEIDENHAIN Inverter Systems for Machine Tool BuildersДокумент48 страницHEIDENHAIN Inverter Systems for Machine Tool BuildersAstaroth Zion0% (1)
- Lubricant and Chemical ProductДокумент29 страницLubricant and Chemical ProductTone RatanalertОценок пока нет
- Laporan Harian OverhoulДокумент234 страницыLaporan Harian OverhoulRosyadОценок пока нет
- Field Bus CommunicationДокумент30 страницField Bus CommunicationArun KumarОценок пока нет
- General Purpose US FusesДокумент69 страницGeneral Purpose US FusesEliasОценок пока нет
- Sintech Make Pumps For Power Generation IndustryДокумент16 страницSintech Make Pumps For Power Generation Industrysahildhingra0% (1)
- Defstan 91-91R7 Amendment2 PDFДокумент38 страницDefstan 91-91R7 Amendment2 PDFlimhockkin3766Оценок пока нет
- Petrochemical Industry in India - Determinants, ChallengesДокумент5 страницPetrochemical Industry in India - Determinants, Challengesvvk2cool100% (1)
- Chaudhry2021 Does Culture Affect Energy PovertyДокумент16 страницChaudhry2021 Does Culture Affect Energy PovertyRaul MJОценок пока нет
- Alan Electronics' Story of Quality, Consistency and ReliabilityДокумент6 страницAlan Electronics' Story of Quality, Consistency and Reliabilitysathishsutharsan87Оценок пока нет
- Cable ColorДокумент4 страницыCable ColorNghia Huynh Ngoc0% (1)
- Catalogo Process Heating 042018Документ9 страницCatalogo Process Heating 042018SreekanthОценок пока нет
- 1006 Tag Engine Parts BookДокумент216 страниц1006 Tag Engine Parts BookNilupul WijeratneОценок пока нет
- Ceramics Science IntroductionДокумент68 страницCeramics Science IntroductionLaura BárbaroОценок пока нет
- HONOMOBO Canada Email Package 2016-June-1 PG 1 / 7Документ9 страницHONOMOBO Canada Email Package 2016-June-1 PG 1 / 7Daniel StaveОценок пока нет
- Actuators & Positioners Linear Pneumatic Actuators: Data SheetДокумент10 страницActuators & Positioners Linear Pneumatic Actuators: Data SheetTai Dang HuyОценок пока нет
- Technical & Service ManualДокумент90 страницTechnical & Service ManualStefano FerrariОценок пока нет
- Protein Tertiary and Quaternary StructureДокумент18 страницProtein Tertiary and Quaternary Structuremaryscribd241Оценок пока нет
- Horn SystemДокумент9 страницHorn SystemMirceaОценок пока нет
- Availability Based Tariff PDFДокумент8 страницAvailability Based Tariff PDFakshay jawaleОценок пока нет
- 3adw000078r0301 Dcs5 Software Descr e CДокумент228 страниц3adw000078r0301 Dcs5 Software Descr e Caninda_dОценок пока нет
- Optimized title for 3LD engine documentДокумент21 страницаOptimized title for 3LD engine documentSunthron SomchaiОценок пока нет
- Service Manual - TMC FiL-11 MH8-5031-504-4336Документ217 страницService Manual - TMC FiL-11 MH8-5031-504-4336Keith McCannОценок пока нет
- Kac 728 628 528Документ12 страницKac 728 628 528solungeОценок пока нет