Вам также может понравиться
- Protesis de Brazo BiomedicoДокумент30 страницProtesis de Brazo BiomedicomemelucasОценок пока нет
- Mano RobóticaДокумент5 страницMano RobóticaL Alejandro Cbr StsОценок пока нет
- Bitacora AnimatronicaДокумент8 страницBitacora AnimatronicaSebastian Moreno AgredoОценок пока нет
- Exoesqueleto BrazoДокумент8 страницExoesqueleto BrazoJosue David Vallejos FloresОценок пока нет
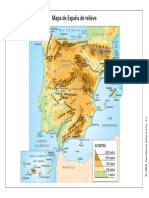
- Mapa de España RelieveДокумент6 страницMapa de España RelievejavierenrilopezОценок пока нет
- El Arte de 1900Документ2 страницыEl Arte de 1900AlvaroОценок пока нет
- Mucho Mas PornoДокумент5 страницMucho Mas Pornojega1996Оценок пока нет
- Protesis Robotica Con Sensor de Temperatura y SensibilidadДокумент5 страницProtesis Robotica Con Sensor de Temperatura y SensibilidadEmili BetancourtОценок пока нет
- Unidad 5-OPT FYQ PDFДокумент28 страницUnidad 5-OPT FYQ PDFMonica GuevaraОценок пока нет
- 02 Adaptacioncurricular 751627-2Документ4 страницы02 Adaptacioncurricular 751627-2elisabet100% (1)
- 4 Exosqueleto PDFДокумент164 страницы4 Exosqueleto PDFmarcotplОценок пока нет
- Impreso Solicitud Acto Comunicado Obra MenorДокумент2 страницыImpreso Solicitud Acto Comunicado Obra MenorAngel Portillo Gonzalez100% (1)
- Literatura. Unidad 3 - El Arte de 1900Документ20 страницLiteratura. Unidad 3 - El Arte de 1900Manuel RiveraОценок пока нет
- Análisis MorfológicoДокумент10 страницAnálisis MorfológicoKiabeth TorresОценок пока нет
- Libro 4 Eso Opcion A PDFДокумент87 страницLibro 4 Eso Opcion A PDFusuario452100% (1)
- DrowДокумент3 страницыDrowmarcoОценок пока нет
- 2d6 Magazine 18 PDFДокумент124 страницы2d6 Magazine 18 PDFesteban BernesОценок пока нет
- Aprende Lo Básico. Unidad 3 LiteraturaДокумент6 страницAprende Lo Básico. Unidad 3 LiteraturaJosh92Оценок пока нет
- Lengua 6º Flashcards PDFДокумент40 страницLengua 6º Flashcards PDFHelena BGОценок пока нет
- La Bufanda de Los SueñosДокумент1 страницаLa Bufanda de Los SueñosLeandroCayao0% (1)
- Unidad 2 Expresión GraficaДокумент28 страницUnidad 2 Expresión Graficaibaizabal08Оценок пока нет
- Cuaderno de Tecnologia 3esoДокумент57 страницCuaderno de Tecnologia 3esoClaudia Vergara Rojas100% (2)
- Ambito Científico Tecnológico N1 M1Документ62 страницыAmbito Científico Tecnológico N1 M1guerrerotay-1Оценок пока нет
- Plano Exoesqueleto PDFДокумент5 страницPlano Exoesqueleto PDFDaniela cОценок пока нет
- Tema2 Hoja3 Logaritmos Soluciones - DesbloqueadoДокумент11 страницTema2 Hoja3 Logaritmos Soluciones - DesbloqueadoSuso QuelleОценок пока нет
- Examenes 3Документ21 страницаExamenes 3Alexandra MarandiОценок пока нет
- He-Man and The Masters of The UniverseДокумент16 страницHe-Man and The Masters of The UniversePedro Felipe Moreno CarvajalОценок пока нет
- 1 Ficha Adaptacion Curricular 3 Eso TecnologiaДокумент1 страница1 Ficha Adaptacion Curricular 3 Eso TecnologiaJuan Fernandez CarrilloОценок пока нет
- MVD Comics 2017 ProgramaДокумент24 страницыMVD Comics 2017 ProgramaMontevideo PortalОценок пока нет
- UsersWebBook 140100 PDFДокумент4 страницыUsersWebBook 140100 PDFEvanescencioОценок пока нет
- Lagunas de RuideraДокумент10 страницLagunas de RuideraManuel AlonsoОценок пока нет
- LENGUA 1 ESO Como Nos Comunicamos Solucionario Ejercicios Resueltos PDFДокумент3 страницыLENGUA 1 ESO Como Nos Comunicamos Solucionario Ejercicios Resueltos PDFVanesaОценок пока нет
- Seres Vivos 5º Primaria AdaptadoДокумент10 страницSeres Vivos 5º Primaria AdaptadoMartaОценок пока нет
- Listado de PreciosДокумент3 страницыListado de PreciosPilar Revaliente OrtegaОценок пока нет
- LCL 4 and Ref y Amp 03Документ2 страницыLCL 4 and Ref y Amp 03Nawal SevilleОценок пока нет
- 4ESO - Fis y Qui - IIДокумент84 страницы4ESO - Fis y Qui - IIVillaxx 05Оценок пока нет
- Examen 1 Evaluación MatesДокумент2 страницыExamen 1 Evaluación MatesHelena BGОценок пока нет
- CATALOGO PAÑOLENCI Junio2020-Convertido UltimoДокумент8 страницCATALOGO PAÑOLENCI Junio2020-Convertido UltimoKaren CarranzaОценок пока нет
- Santillana 2º Bachiller GeogaДокумент56 страницSantillana 2º Bachiller GeogaMonica MartinezОценок пока нет
- Mano Robotica Version ProyectoДокумент7 страницMano Robotica Version ProyectoÁngel CruzОценок пока нет
- fx-CG50 Soft ESДокумент624 страницыfx-CG50 Soft ESJosé Daniel MoncayoОценок пока нет
- Tema 7 El MovimientoДокумент9 страницTema 7 El MovimientomariaОценок пока нет
- Recopilación de Todos Los Ejercicios de Equilibrio Químico (PAU Canarias)Документ6 страницRecopilación de Todos Los Ejercicios de Equilibrio Químico (PAU Canarias)Clases particulares en la Laguna100% (2)
- Traducción Embajadas Moros y Cristianos de El CampelloДокумент10 страницTraducción Embajadas Moros y Cristianos de El CampelloEl Campello TurismoОценок пока нет
- Bioloxía-Xeoloxía Rosalia de Castro PDFДокумент230 страницBioloxía-Xeoloxía Rosalia de Castro PDFMa riaОценок пока нет
- 3º ESO. Mesteres de Juglaría y Clerecía. Saber Hacer, SantillanaДокумент1 страница3º ESO. Mesteres de Juglaría y Clerecía. Saber Hacer, SantillanaJose VilchesОценок пока нет
- Biología y Geología 1º ESO. Comunidad Foral NavarraДокумент2 страницыBiología y Geología 1º ESO. Comunidad Foral Navarradiego_partyОценок пока нет
- T5-Materiales Uso TecnicoДокумент26 страницT5-Materiales Uso TecnicopelandintecnoОценок пока нет
- Tema 2 o Mapa Físico de España e de GaliciaДокумент8 страницTema 2 o Mapa Físico de España e de Galiciarcidgalante4921Оценок пока нет
- Examen Numeros Reales SolucionadoДокумент2 страницыExamen Numeros Reales SolucionadocaadoiОценок пока нет
- No Hi Ha Petons Per Als FantasmesДокумент16 страницNo Hi Ha Petons Per Als FantasmesSonia0% (1)
- Trama Completa Reinos de HierroДокумент14 страницTrama Completa Reinos de HierroSamuel BeaumontОценок пока нет
- Ciencias Sociales: Mar García González Gabriela Martín Bermejo Lourdes Etxebarria OrellaДокумент22 страницыCiencias Sociales: Mar García González Gabriela Martín Bermejo Lourdes Etxebarria OrellaEva Fernández RodríguezОценок пока нет
- Dokumen - Tips - Lengua Algaida Tema 11 PDFДокумент5 страницDokumen - Tips - Lengua Algaida Tema 11 PDFEncarni FerreiraОценок пока нет
- Los Ríos de EspañaДокумент11 страницLos Ríos de EspañaJavier PérezОценок пока нет
- MA - Algebra - R. Criado y A. Gallinari 2003Документ353 страницыMA - Algebra - R. Criado y A. Gallinari 2003ByronОценок пока нет
- She-Ra y Las PrincesasДокумент1 страницаShe-Ra y Las PrincesasBárbara OliveiraОценок пока нет
- Trabajo Cientifico 6to CДокумент13 страницTrabajo Cientifico 6to CXdd XdddОценок пока нет
- TiendasДокумент6 страницTiendasandres cuervoОценок пока нет
- Generaciones de ComputadorasДокумент8 страницGeneraciones de Computadorasandres cuervoОценок пока нет
- INTRODUCCIÓNДокумент7 страницINTRODUCCIÓNandres cuervoОценок пока нет
- Redes Sociales 707Документ5 страницRedes Sociales 707joker Espinosa wtfОценок пока нет
- El Sentido de La OportunidadДокумент9 страницEl Sentido de La Oportunidadcristofer05Оценок пока нет
- Roles Del Departamento de Diseño-1Документ14 страницRoles Del Departamento de Diseño-1Angie Tovar100% (1)
- FUNDAMENTOS DE ECONOMIA EnsayoДокумент5 страницFUNDAMENTOS DE ECONOMIA EnsayomonicaОценок пока нет
- 1 PT CarátulaДокумент3 страницы1 PT CarátulaLuisAngelMancoVilcherresОценок пока нет
- Tipos de Memorias y CaracteristicasДокумент2 страницыTipos de Memorias y Caracteristicaschako300796100% (1)
- Pulpa DentalДокумент74 страницыPulpa DentalPauОценок пока нет
- Estructura ArancelariaДокумент3 страницыEstructura ArancelariaJesus Hernandez De La CruzОценок пока нет
- Condiciones de Aprobación y CursadaДокумент3 страницыCondiciones de Aprobación y CursadaKon 555Оценок пока нет
- Cartilla Informatica 6taДокумент34 страницыCartilla Informatica 6taCristian Carlos Damian CalleОценок пока нет
- Promociones AT&T Premium Smartphones A 24 MesesДокумент7 страницPromociones AT&T Premium Smartphones A 24 MesesKarla NúñezОценок пока нет
- Presentacio Ün Curso Taller Upaep Evaluacio Ün 3Документ55 страницPresentacio Ün Curso Taller Upaep Evaluacio Ün 3Jetzahel Lucas JОценок пока нет
- 1º Medio Física Guía 2 Ondas (Clase 3 y 4) ResoluciónДокумент3 страницы1º Medio Física Guía 2 Ondas (Clase 3 y 4) ResoluciónMayte ValenzuelaОценок пока нет
- Formato Ficha-Tecnica Codi-Proyecto 2011 Gobierno y Asuntos PublicosДокумент20 страницFormato Ficha-Tecnica Codi-Proyecto 2011 Gobierno y Asuntos PublicosCarlos David Lopez NoriegaОценок пока нет
- Diapositivas EmprendimientoДокумент17 страницDiapositivas EmprendimientoSilvana ManchayОценок пока нет
- Diapositiva Realizada Angelica Deza Sanchez Mayo2016Документ25 страницDiapositiva Realizada Angelica Deza Sanchez Mayo2016clismanОценок пока нет
- Técnicas de GrabaciónДокумент4 страницыTécnicas de GrabaciónEthan ArnstbergОценок пока нет
- Diagnòstico. Ciencias NaturalesДокумент6 страницDiagnòstico. Ciencias NaturalesMilton MoralesОценок пока нет
- Interactividad y MultimedialidadДокумент3 страницыInteractividad y MultimedialidadSammy Pérez JОценок пока нет
- Un Generador de Vapor VaporizaДокумент4 страницыUn Generador de Vapor VaporizaDaniel'Cisneros67% (3)
- Administ Arc I OnДокумент5 страницAdminist Arc I OnLinford Kits Porta ChОценок пока нет
- I.I.S.S. Primer Piso: Dormitorio 1 JardínДокумент1 страницаI.I.S.S. Primer Piso: Dormitorio 1 JardínfrancisОценок пока нет
- Actividad 1 de Aprendizaje - Lienzo o CanvasДокумент4 страницыActividad 1 de Aprendizaje - Lienzo o CanvasSamantha Coral Perez MartinezОценок пока нет
- Tomave PDMДокумент9 страницTomave PDMSergio Aramayo67% (3)
- ALM 12.50 Guia UsuarioДокумент894 страницыALM 12.50 Guia UsuarioFelipeGálvezRomero100% (1)
- Cream Cute Illustrative Mind Map BrainstormДокумент1 страницаCream Cute Illustrative Mind Map BrainstormJuan Zambudio palomaresОценок пока нет
- Trabaj Final Carrion E1Документ20 страницTrabaj Final Carrion E1Jefrisito Richi CarrionОценок пока нет
- FDS AntiespumanteДокумент11 страницFDS AntiespumanteJulian Mora AntivarОценок пока нет
- Termacron NT 070 BATДокумент3 страницыTermacron NT 070 BATtermacron100% (1)
- Relación Del Estrés y ConflictosДокумент4 страницыRelación Del Estrés y ConflictosJose Carlos Suarez ChavezОценок пока нет
- 6 - El Arte Como Un Medio de ComunicaciónДокумент2 страницы6 - El Arte Como Un Medio de ComunicaciónElla Cecilia Celedon SimancaОценок пока нет