Вам также может понравиться
- Eletronica Basica Capitulo 07 Portas Logicas Tocci 2014 PDFДокумент93 страницыEletronica Basica Capitulo 07 Portas Logicas Tocci 2014 PDFolivervisОценок пока нет
- 10 - Nocoes de CLPДокумент31 страница10 - Nocoes de CLPdarlan cesar100% (1)
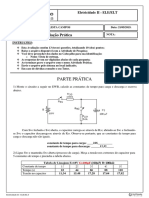
- Avaliação Prática - Eletricidade IIДокумент6 страницAvaliação Prática - Eletricidade IINilton CamposОценок пока нет
- Apostila MPS - Aluno PDFДокумент34 страницыApostila MPS - Aluno PDFSilvio FirminoОценок пока нет
- Aulas Práticas Eletronica Digital I PDFДокумент35 страницAulas Práticas Eletronica Digital I PDFVictor CamposОценок пока нет
- Exercícios Dispositivos Eletrônicos Analógicos Lista 1Документ7 страницExercícios Dispositivos Eletrônicos Analógicos Lista 1Marco AntonioОценок пока нет
- Lab 6 MIT Partida Direta e Chave Estrela Triangulo (Roteiro)Документ8 страницLab 6 MIT Partida Direta e Chave Estrela Triangulo (Roteiro)Alecio Ribeiro Sccp100% (1)
- Prova Final - Eletronica de PotenciaДокумент5 страницProva Final - Eletronica de PotenciaPatrick Trivilin100% (1)
- Sistemas Microcontrolados - ELT 1Документ3 страницыSistemas Microcontrolados - ELT 1Gielly Campos100% (1)
- 1 Avaliação de Eletrohidropneumática (Recuperação Paralela)Документ8 страниц1 Avaliação de Eletrohidropneumática (Recuperação Paralela)84152601Оценок пока нет
- Modelos de CIДокумент6 страницModelos de CIYago GomesОценок пока нет
- Plano de Ensino 2 - Situação ProblemaДокумент5 страницPlano de Ensino 2 - Situação ProblemaRobson TelesОценок пока нет
- Apostila Introdução A Instrumentação - CompletaДокумент180 страницApostila Introdução A Instrumentação - Completapy4aqa2962Оценок пока нет
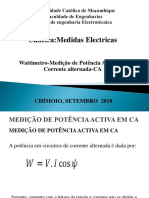
- Aula 3 WattimetroДокумент19 страницAula 3 WattimetroDemítrio G. PioОценок пока нет
- Atividade de Pesquisa 01Документ6 страницAtividade de Pesquisa 01Juliano MartinsОценок пока нет
- Programaao em Baixo NivelДокумент16 страницProgramaao em Baixo NivelDiego AntonioОценок пока нет
- Lista de Exercicios CLPДокумент3 страницыLista de Exercicios CLPalan67% (3)
- Ae (Coel) TemporizadorДокумент2 страницыAe (Coel) TemporizadorYuri MatosОценок пока нет
- Lista de Exercícios de Eletrônica de PotênciaДокумент5 страницLista de Exercícios de Eletrônica de PotênciaManuel Jonas Fonseca BarbalhoОценок пока нет
- Aula 08 - Robótica IndustrialДокумент15 страницAula 08 - Robótica IndustrialEDVRICОценок пока нет
- Exercicios de CLPДокумент11 страницExercicios de CLPVanessa MartinsОценок пока нет
- Avaliação Prática - Eletrônica Digital-1 29Документ2 страницыAvaliação Prática - Eletrônica Digital-1 29Gielly CamposОценок пока нет
- Lista de Exercicios Circuitos LógicosДокумент3 страницыLista de Exercicios Circuitos LógicosAndre BomjardimОценок пока нет
- Aula 3 e 1 CompletasДокумент17 страницAula 3 e 1 CompletasDayvson FerreiraОценок пока нет
- 0.967652001330085126 130 Eletronica DigitalДокумент155 страниц0.967652001330085126 130 Eletronica DigitalEng Alex Silva100% (1)
- Atividade de Pesquisa (Документ3 страницыAtividade de Pesquisa (fabio fa100% (1)
- Apostila CLP - CINFOTECДокумент67 страницApostila CLP - CINFOTECcarloseduardo1964100% (2)
- Aula 6 - Contadores e Temporizadores - Lista de Exercícios PráticosДокумент9 страницAula 6 - Contadores e Temporizadores - Lista de Exercícios PráticosandregrothОценок пока нет
- Manual McLab2 (16F877A) Rev 07Документ23 страницыManual McLab2 (16F877A) Rev 07Sidney HenriqueОценок пока нет
- Resolução Prova 2 Eletrônica AnalógicaДокумент3 страницыResolução Prova 2 Eletrônica AnalógicaIsabella BОценок пока нет
- Instrumentação e Controle. Exercícios de Revisão.Документ2 страницыInstrumentação e Controle. Exercícios de Revisão.Jonathas SilvaОценок пока нет
- Sistema Logico 03 - Controle de Nivel Com Tanque ReservaДокумент1 страницаSistema Logico 03 - Controle de Nivel Com Tanque ReservaESS AUTOMAÇÃOОценок пока нет
- Derivação SimplesДокумент4 страницыDerivação SimplesalexcostelaОценок пока нет
- Atividade de Pesquisa 02 - Eletrônica DigitalДокумент8 страницAtividade de Pesquisa 02 - Eletrônica Digitaljafkjakd75% (4)
- Festo Didactic - CLP Fec StandardДокумент68 страницFesto Didactic - CLP Fec StandardDheiver Santos100% (1)
- Corrente Alternada - Circuitos Monofásicos e Circuitos Trifásicos (Powerpoint)Документ18 страницCorrente Alternada - Circuitos Monofásicos e Circuitos Trifásicos (Powerpoint)Miguel Azevedo100% (2)
- Acionamentos Elétricos - Plano de AulaДокумент81 страницаAcionamentos Elétricos - Plano de AulaMaxDalmiОценок пока нет
- 02.DLB TSCLP - Atividades Com ControladoresДокумент227 страниц02.DLB TSCLP - Atividades Com ControladoresFlávio TorresОценок пока нет
- Apostila CLP ClicEdit AlexandreДокумент26 страницApostila CLP ClicEdit AlexandreJoão Dias da SilveiraОценок пока нет
- Defeitos MonitoresДокумент85 страницDefeitos Monitoresjonymac_br0% (2)
- Aula 1 Eletrotecnica Geral 2016-1 - v2Документ2 страницыAula 1 Eletrotecnica Geral 2016-1 - v2Felipe MorganОценок пока нет
- Questionario Partida Estrela - TriânguloДокумент7 страницQuestionario Partida Estrela - TriânguloSaulo CâmaraОценок пока нет
- ATV12-Diagnósticos e Resolução de Problemas-BR-11JAN10 PDFДокумент6 страницATV12-Diagnósticos e Resolução de Problemas-BR-11JAN10 PDFkleberОценок пока нет
- EASA - Eletroeletrônica Aplicada A Sistemas Automatizados - 1Документ87 страницEASA - Eletroeletrônica Aplicada A Sistemas Automatizados - 1Gabriel LucasОценок пока нет
- Exercício 3 Zener 2023.2Документ5 страницExercício 3 Zener 2023.2prof.edil.itzОценок пока нет
- Roteiro Teste Fonte PDFДокумент3 страницыRoteiro Teste Fonte PDFMarcelo Priebe100% (1)
- Aula Automação IndustrialДокумент20 страницAula Automação IndustrialBibiana PortoОценок пока нет
- Manual ZelioДокумент24 страницыManual ZelioNelson ZaurisioОценок пока нет
- WEG CLPsДокумент28 страницWEG CLPsRodrigoОценок пока нет
- 7219-E-7221-Display de Leds de 7 SegmentosДокумент8 страниц7219-E-7221-Display de Leds de 7 SegmentosotoОценок пока нет
- Roteiro - Práticas - 2Документ2 страницыRoteiro - Práticas - 2Claudia FonsecaОценок пока нет
- Conjunto para Estudo de Geração, Transmissão e Distribuição de Energia ElétricaДокумент47 страницConjunto para Estudo de Geração, Transmissão e Distribuição de Energia ElétricaCaio de MoraesОценок пока нет
- 6 - Laboratório de Sistemas Digitais - 2 SérieДокумент64 страницы6 - Laboratório de Sistemas Digitais - 2 SérieCristiano BragaОценок пока нет
- Multiplexador - DemultiplexadorДокумент21 страницаMultiplexador - DemultiplexadorAlvaro AlvesОценок пока нет
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoОт EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoОценок пока нет
- PersonalidadeДокумент23 страницыPersonalidadeRafael MarksonОценок пока нет
- 17 Anexo3Документ13 страниц17 Anexo3Rafael MarksonОценок пока нет
- Cuidados Pré e Pó DepilaçãoДокумент2 страницыCuidados Pré e Pó DepilaçãoRafael Markson100% (1)
- 2016 04 19 Manual Curso de Motores 2016 2 PDFДокумент232 страницы2016 04 19 Manual Curso de Motores 2016 2 PDFRafael MarksonОценок пока нет
- Roboticando I - Mecanismos & AutomatismosДокумент4 страницыRoboticando I - Mecanismos & AutomatismosjotafreireОценок пока нет
- Tickmill CopyTrade 10 Motivos para Copiar Os Melhores Traders Do Mundo - Consistência GarantidaДокумент2 страницыTickmill CopyTrade 10 Motivos para Copiar Os Melhores Traders Do Mundo - Consistência GarantidaharissonrafandradeОценок пока нет
- Documentacao Robo WtaДокумент4 страницыDocumentacao Robo WtaAnderson RodriguesОценок пока нет
- Aula 05 - Introdução A Sistemas CNCДокумент60 страницAula 05 - Introdução A Sistemas CNCHans DarnwellОценок пока нет
- ChatGPT3 PT/BRДокумент62 страницыChatGPT3 PT/BRJoão Pedro Guidicini100% (7)
- KST WorkVisual 60 PTДокумент260 страницKST WorkVisual 60 PTSidnei Steuernagel100% (3)
- Robos 30pdfДокумент10 страницRobos 30pdfTocoMarotoОценок пока нет
- Robôs Autônomos Engenharia de Software Turma 2 IFAMДокумент6 страницRobôs Autônomos Engenharia de Software Turma 2 IFAMRodrigo BerinoОценок пока нет
- Livro - A Meta - Resumo SintetizadoДокумент39 страницLivro - A Meta - Resumo SintetizadoJosiel Morais SilvaОценок пока нет
- Capítulo 2 PDFДокумент8 страницCapítulo 2 PDFWagner AlmeidaОценок пока нет
- Livro Bases Computacionais - Parte II PDFДокумент116 страницLivro Bases Computacionais - Parte II PDFGuilherme SaltarelliОценок пока нет
- Revista de Direito Médico e Da Saúde - Set 2020Документ172 страницыRevista de Direito Médico e Da Saúde - Set 2020c2w8jjsqb6Оценок пока нет
- TCC 20192 AndreLuizGranemannДокумент111 страницTCC 20192 AndreLuizGranemannPedro GodoiОценок пока нет
- Catalogo Robos MitsubishiДокумент36 страницCatalogo Robos MitsubishiTházio LimaОценок пока нет
- Treinamento FanucДокумент54 страницыTreinamento FanucRegina Correia100% (7)
- M03 - 01 - ArduinoДокумент51 страницаM03 - 01 - ArduinoJosé CarlosОценок пока нет
- Regras Sumô de RobôsДокумент8 страницRegras Sumô de RobôsSamira De AssisОценок пока нет
- Regradetrês ImprimirДокумент56 страницRegradetrês Imprimirjuliana100% (1)
- Exercício Avaliativo de Robótica 1Документ8 страницExercício Avaliativo de Robótica 1Thauana KalfelsОценок пока нет
- Plano de AulaДокумент4 страницыPlano de AulaPaulo Rosa100% (1)
- TICS 10 ClasseДокумент4 страницыTICS 10 ClasseNelson86% (7)
- Historia Telecomunicacoes em PortugalДокумент11 страницHistoria Telecomunicacoes em PortugalApolonia NunesОценок пока нет
- Durr - Manual Robôs - MecânicaДокумент92 страницыDurr - Manual Robôs - MecânicaSidcleyОценок пока нет
- ProvaДокумент6 страницProvaDanilo SoutoОценок пока нет
- Blade Runner o Elogio Do SimulacroДокумент15 страницBlade Runner o Elogio Do SimulacroSummum ConatusОценок пока нет
- Mecatrônica FácilДокумент42 страницыMecatrônica FácilCarlos Henrique Oliveira100% (1)
- A Presença Das Tecnologias Interativas Na EducaçãoДокумент13 страницA Presença Das Tecnologias Interativas Na EducaçãoLucas NetoОценок пока нет
- 4 Módulo de Transformação Digital No Setor IndustrialДокумент23 страницы4 Módulo de Transformação Digital No Setor IndustrialVagner Batista100% (1)
- Cyfell PDFДокумент23 страницыCyfell PDFThiago BelloubeОценок пока нет
- Evolução Tecnológica e Robótica Power PointДокумент17 страницEvolução Tecnológica e Robótica Power Pointferraugusto9021Оценок пока нет