Вам также может понравиться
- Potencial eólico WeibullДокумент40 страницPotencial eólico WeibullDavid Mauricio ForeroОценок пока нет
- Analisis Estructural-Jairo Uribe Escamilla-166-201Документ36 страницAnalisis Estructural-Jairo Uribe Escamilla-166-201PilarOrta100% (1)
- La ecuación general de segundo grado en dos y tres variablesОт EverandLa ecuación general de segundo grado en dos y tres variablesОценок пока нет
- Ejercicios Estatica 2Документ6 страницEjercicios Estatica 2Emilio Jose Pavon LedesmaОценок пока нет
- Maestría en Ingeniería Industrial AzucareraДокумент25 страницMaestría en Ingeniería Industrial Azucarerahulasko antonio meza sozaОценок пока нет
- Capitulo 02 Sistemas Con Un Grado de Libertad PDFДокумент102 страницыCapitulo 02 Sistemas Con Un Grado de Libertad PDFAntonyG.MorenoОценок пока нет
- Ogata - 5ta Sistemas Dinamicos MecanicosДокумент17 страницOgata - 5ta Sistemas Dinamicos MecanicosJosue BarreraОценок пока нет
- Tefilo - Curso Del CambioДокумент106 страницTefilo - Curso Del CambioAlejandro LavínОценок пока нет
- Prueba de Naturaleza Circuitos Eléctricos. 6º BásicoДокумент3 страницыPrueba de Naturaleza Circuitos Eléctricos. 6º BásicoClaudia Andrea Soto88% (8)
- Ingeniería de Control ModernaДокумент4 страницыIngeniería de Control ModernaNv CisnerosОценок пока нет
- Ingeniería de Control ModernaДокумент14 страницIngeniería de Control ModernaEdwin AmayaОценок пока нет
- Ogata Páginas 176 187Документ12 страницOgata Páginas 176 187Lenin Fabian Gutierrez OsorioОценок пока нет
- Ejercicio A-3 9 Ingenieria-De-Control-Moderna-Ogata-5ed PDFДокумент3 страницыEjercicio A-3 9 Ingenieria-De-Control-Moderna-Ogata-5ed PDFOskarОценок пока нет
- P3 OgataДокумент3 страницыP3 OgataantoniooballegarciaОценок пока нет
- EjerДокумент38 страницEjerLuismi TRОценок пока нет
- MELДокумент3 страницыMELEnrique De Jesus BaltazarОценок пока нет
- 10.9 Metodo de La Viga ConjugadaДокумент13 страниц10.9 Metodo de La Viga Conjugadalestat_95Оценок пока нет
- Combinacion de Resortes. Serie, ParaleloДокумент6 страницCombinacion de Resortes. Serie, ParalelochinoadanОценок пока нет
- P2 OgataДокумент3 страницыP2 OgataantoniooballegarciaОценок пока нет
- Elementos Finitos Cap1.3 p2Документ12 страницElementos Finitos Cap1.3 p2Henry HoyosОценок пока нет
- Teor Cap 2 Tecnicas ArrollamientoДокумент13 страницTeor Cap 2 Tecnicas ArrollamientoOliver Gálvez ZavaletaОценок пока нет
- Lineas en Regimen Permanente DesequilibradoДокумент20 страницLineas en Regimen Permanente DesequilibradoAdrian Arturo Yampa GuerraОценок пока нет
- Vibraciones ForzadasДокумент9 страницVibraciones Forzadasjoneth1g.1mostaceroОценок пока нет
- Tarea de F-Sica I 30 - Enero - 2024Документ6 страницTarea de F-Sica I 30 - Enero - 2024Jhazeel Zuloaga QuioОценок пока нет
- Circuito Equivalente de Un Parlante - GiradorДокумент12 страницCircuito Equivalente de Un Parlante - GiradorNachoMeijideОценок пока нет
- Ecuación tres momentos viga continuaДокумент36 страницEcuación tres momentos viga continuaSantiago MuñozОценок пока нет
- Ingeniería de Control Moderna: Figura 3-26Документ4 страницыIngeniería de Control Moderna: Figura 3-26Fernando Paez MendizabalОценок пока нет
- U02 4 Eso Fisica y QuimicaДокумент27 страницU02 4 Eso Fisica y QuimicafernandoОценок пока нет
- Tranformadores ParaleloДокумент12 страницTranformadores ParalelojesusОценок пока нет
- Análisis y diseño de sistemas de control por método respuesta frecuenciaДокумент15 страницAnálisis y diseño de sistemas de control por método respuesta frecuenciaAlberto GarcíaОценок пока нет
- Expar 1Документ2 страницыExpar 1Dante Ali Vilchez SanchezОценок пока нет
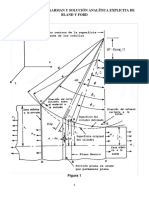
- Ecuación de Von Karman y Solución Analítica Explicita de Bland y FordДокумент14 страницEcuación de Von Karman y Solución Analítica Explicita de Bland y FordJose EОценок пока нет
- Fracciones, Exponenetes y Exponentes Fraccionarios PDFДокумент19 страницFracciones, Exponenetes y Exponentes Fraccionarios PDFYeny PazОценок пока нет
- Trabajo de Control AutomáticoДокумент20 страницTrabajo de Control Automáticophoenix eastwoodОценок пока нет
- I1 Iee2613 2016 1Документ4 страницыI1 Iee2613 2016 1DeatSoulОценок пока нет
- Resolucion TP - FUNCION - TRANSFERENCIA - PLANO - COMPLEJOДокумент20 страницResolucion TP - FUNCION - TRANSFERENCIA - PLANO - COMPLEJOElíasJuliánОценок пока нет
- UNIDAD 1.semana1-Clase2JДокумент13 страницUNIDAD 1.semana1-Clase2JJair PaucarОценок пока нет
- Elasticidad: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 A B C DДокумент5 страницElasticidad: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 A B C DKevin Paul Aguilar ChamaОценок пока нет
- Resolucion de Circuitos Trifasicos (Modo de AdДокумент44 страницыResolucion de Circuitos Trifasicos (Modo de AdatreyunОценок пока нет
- Triple producto escalar y vectorialДокумент5 страницTriple producto escalar y vectorialKaren Alejandra López AlvarezОценок пока нет
- Chopra Condensación EstáticaДокумент3 страницыChopra Condensación EstáticaBeatriz Diaz CaballeroОценок пока нет
- 3 Sistema en PuДокумент6 страниц3 Sistema en PuRamon Alfredo Aballay ArceОценок пока нет
- Técnicas de arrollamiento en máquinas asíncronasДокумент12 страницTécnicas de arrollamiento en máquinas asíncronasAlvaro ClarosОценок пока нет
- Energia Especifica en Canales FinalДокумент19 страницEnergia Especifica en Canales FinalErwinBertBellidoAñancaОценок пока нет
- Vibración Libre Con Amortiguamiento ViscosoДокумент5 страницVibración Libre Con Amortiguamiento ViscosoAnthony MelendreОценок пока нет
- Resultante fuerzas equilibrio partículaДокумент49 страницResultante fuerzas equilibrio partículatefakrrilloОценок пока нет
- Diseño de Dos Factores de Dos Bloques 2017Документ26 страницDiseño de Dos Factores de Dos Bloques 2017Erick TejadaОценок пока нет
- MT227 EP 2015 1 SolДокумент5 страницMT227 EP 2015 1 SolFritzDeepОценок пока нет
- Expresiones simplificadas para el cálculo de incremento de esfuerzo vertical bajo vértice agudoДокумент16 страницExpresiones simplificadas para el cálculo de incremento de esfuerzo vertical bajo vértice agudoJose Luis Nava HernandezОценок пока нет
- Libro Final de Fluidos Leccion 14 Energia-BombasДокумент10 страницLibro Final de Fluidos Leccion 14 Energia-BombasWeimar Jurado GonzalesОценок пока нет
- Analisis de Datos U5Документ15 страницAnalisis de Datos U5JOSE PABLO CARREON MERAZОценок пока нет
- Ac 201824133708Документ6 страницAc 201824133708Henry Escorcia AhumadaОценок пока нет
- Sintesis - Deformaciones en Barras - Giro RelativoДокумент7 страницSintesis - Deformaciones en Barras - Giro RelativoIña ElizaldeОценок пока нет
- M. Doble Integración PDFДокумент21 страницаM. Doble Integración PDFLuis BryanОценок пока нет
- Movimiento de partículas en tres dimensionesДокумент122 страницыMovimiento de partículas en tres dimensionesHector S. MajiОценок пока нет
- Cinemática de La PartículaДокумент102 страницыCinemática de La PartículaRepositorio MantenimientoОценок пока нет
- Práctica 06 Ley de Ohm y Resistencia de ConductoresДокумент9 страницPráctica 06 Ley de Ohm y Resistencia de ConductoresGabriel DBОценок пока нет
- Campos y Ondas: Primera prueba de autoevaluaciónДокумент4 страницыCampos y Ondas: Primera prueba de autoevaluaciónJavier Solís FernándezОценок пока нет
- 4 Clase #4 - Tema 2Документ8 страниц4 Clase #4 - Tema 2DanielaОценок пока нет
- Capitulo 4 (1-8)Документ14 страницCapitulo 4 (1-8)Ivan Rondinel BulejeОценок пока нет
- Manual Electronica de Potencia PDFДокумент54 страницыManual Electronica de Potencia PDFAniceto Fernandez LimachiОценок пока нет
- Generador SincrónicoДокумент20 страницGenerador SincrónicoLiz CastilloОценок пока нет
- Informe Alternador en VacíoДокумент16 страницInforme Alternador en VacíoRodri Gonzalez50% (2)
- Laboratorio 6Документ10 страницLaboratorio 6Alessandro Giomar Zuta NavarroОценок пока нет
- Term Odin A MicaДокумент7 страницTerm Odin A MicaJonatán MarizzaОценок пока нет
- Medidas de La PotenciaДокумент10 страницMedidas de La PotenciaEdgardo Quiquia RodriguezОценок пока нет
- Transformadores 0144Документ26 страницTransformadores 0144Manuel ArdittoОценок пока нет
- Examen 4 2018Документ1 страницаExamen 4 2018Pnfp Tucuman Trancas PrimariaОценок пока нет
- Turboexpansión para extracción de líquidos de gas naturalДокумент19 страницTurboexpansión para extracción de líquidos de gas naturalFlor Ayma GuzmánОценок пока нет
- Masscombi25005000100525es PDFДокумент48 страницMasscombi25005000100525es PDFJosé Miguel SanjuánОценок пока нет
- Motores y Cables IДокумент25 страницMotores y Cables IEdgar Escobar CastrillnОценок пока нет
- Proyecto de Optimización Energética DomesticaДокумент20 страницProyecto de Optimización Energética DomesticaOscar Day JimenezОценок пока нет
- EnergiaДокумент5 страницEnergiaDANIEL MOYAОценок пока нет
- Algoritmo Hibrido MatlabДокумент210 страницAlgoritmo Hibrido MatlabGloria Esmeralda Sandoval MartinezОценок пока нет
- Normas eléctricas mexicanas NOM-001-SEDE comparaciónДокумент23 страницыNormas eléctricas mexicanas NOM-001-SEDE comparaciónWilliams CruzVill100% (1)
- Equipos refrigeración vacunasДокумент21 страницаEquipos refrigeración vacunasmanuelj_sanchezr100% (1)
- Condensadores y Generadores de Vapor - (Christian Vargas Medina)Документ14 страницCondensadores y Generadores de Vapor - (Christian Vargas Medina)fvvvtvvОценок пока нет
- Descripción de Generadores GVДокумент5 страницDescripción de Generadores GVJerry ValdezОценок пока нет
- Preparémonos para El Cambio - Antonio Romero y Su Generador Electromagnético OMEGA RF-5000 (Actualizado Con Video) ENERGIA LIBREДокумент11 страницPreparémonos para El Cambio - Antonio Romero y Su Generador Electromagnético OMEGA RF-5000 (Actualizado Con Video) ENERGIA LIBREAlberto Adlf100% (1)
- Cómo funciona el KERS o freno regenerativoДокумент8 страницCómo funciona el KERS o freno regenerativoJose Rodrigo Camelo CubillosОценок пока нет
- MUP FISICA 11mo Grado SEJAДокумент25 страницMUP FISICA 11mo Grado SEJAMelvin Antonio Gomez GarciaОценок пока нет
- Tarea3 Cinematica DinamicaДокумент4 страницыTarea3 Cinematica DinamicaJimena ManjarrezОценок пока нет
- Analisis Estructural FinalДокумент31 страницаAnalisis Estructural Finalyessenia oscoОценок пока нет
- Exp4 Secundaria 3y4 Exploramos Act13 ImportanciadelaelectricidadДокумент7 страницExp4 Secundaria 3y4 Exploramos Act13 ImportanciadelaelectricidadCésar YvánОценок пока нет
- Optimización de sistemas de cogeneración residencialДокумент218 страницOptimización de sistemas de cogeneración residencialLibia Nurys Espitia HernandezОценок пока нет
- Informe MATER FEB 2023Документ30 страницInforme MATER FEB 2023Jorge GomezОценок пока нет
- Nuestra CalefacciÓn de CasaДокумент3 страницыNuestra CalefacciÓn de CasaJesusОценок пока нет