Вам также может понравиться
- Https WWW - Dsprelated.com Blogimages RickLyons Sliding DFT Fast LyonsДокумент10 страницHttps WWW - Dsprelated.com Blogimages RickLyons Sliding DFT Fast LyonsMurali KrishnaОценок пока нет
- The Discrete Wavelet Transform For Image CompressionДокумент31 страницаThe Discrete Wavelet Transform For Image CompressionEmir BuzaОценок пока нет
- High-Efficiency and Low-Power Architectures For 2-D DCT and IDCT Based On CORDIC RotationДокумент6 страницHigh-Efficiency and Low-Power Architectures For 2-D DCT and IDCT Based On CORDIC RotationGopinathan MuthusamyОценок пока нет
- Digital Watermarking For Multimedia ProtectionДокумент6 страницDigital Watermarking For Multimedia ProtectionanithabasОценок пока нет
- Electronics Communications 1Документ18 страницElectronics Communications 1VarunОценок пока нет
- DSP ManualДокумент43 страницыDSP ManualMaryam MuneebОценок пока нет
- S&S Assignment Dec2022Документ2 страницыS&S Assignment Dec2022AnonymousОценок пока нет
- C093 PDFДокумент10 страницC093 PDFSade RinconОценок пока нет
- Wien BridgeOscillatorhasSimplifiedFrequencyControlДокумент7 страницWien BridgeOscillatorhasSimplifiedFrequencyControlVĩnh TônОценок пока нет
- 2-D Fir Filters Design Using Least Square Error With Scaling-Free Mcclellan TransformationДокумент4 страницы2-D Fir Filters Design Using Least Square Error With Scaling-Free Mcclellan Transformationकिशोरी जूОценок пока нет
- Implementation and Performance Analysis PDFДокумент5 страницImplementation and Performance Analysis PDFMohamed GanounОценок пока нет
- CODESfor OCDMA2Документ21 страницаCODESfor OCDMA2prateekОценок пока нет
- 1982, Integral Equation Formulation of Microstrip AntennasДокумент6 страниц1982, Integral Equation Formulation of Microstrip AntennasRicha SharmaОценок пока нет
- Calculation of Shock Response Spectrum: Abstract: As It Is Stated in The ISO 18431-4 Standard, A ShockДокумент6 страницCalculation of Shock Response Spectrum: Abstract: As It Is Stated in The ISO 18431-4 Standard, A ShockMansi ShahОценок пока нет
- A Novel Loss Estimation Technique For Power ConverДокумент7 страницA Novel Loss Estimation Technique For Power ConverSridhar MОценок пока нет
- Dyadic Curvelet Transform (Dclet) For Image Noise ReductionДокумент2 страницыDyadic Curvelet Transform (Dclet) For Image Noise ReductionOmer Aziz MadniОценок пока нет
- CombiningДокумент5 страницCombiningShafayat AbrarОценок пока нет
- 4.3 2-D Discrete Cosine Transforms: N N K N N K N N X K K XДокумент19 страниц4.3 2-D Discrete Cosine Transforms: N N K N N K N N X K K Xnayeem4444Оценок пока нет
- Tsukanov2011 Article SuperconductingCavitiesAndCharДокумент9 страницTsukanov2011 Article SuperconductingCavitiesAndCharOktavyan HardiyonoОценок пока нет
- Optical Characteristics of Ti2O3Документ20 страницOptical Characteristics of Ti2O3Vinod ChackoОценок пока нет
- Mismatch-Shaping Serial Digital-To-Analog Converter: Jesper Steensgaard Un-Ku Moon and Gabor C. TemesДокумент4 страницыMismatch-Shaping Serial Digital-To-Analog Converter: Jesper Steensgaard Un-Ku Moon and Gabor C. TemesShorav SuriyalОценок пока нет
- Simplest Working Example LaTeX Document-1Документ5 страницSimplest Working Example LaTeX Document-1Soumyadip MondalОценок пока нет
- RTSДокумент32 страницыRTSkoushikr_inОценок пока нет
- Doerpinghaus IST05Документ5 страницDoerpinghaus IST05bulli babuОценок пока нет
- Identification and Diagnosis of Electrical Fault of Asynchronous MotorДокумент3 страницыIdentification and Diagnosis of Electrical Fault of Asynchronous Motorddatdh1Оценок пока нет
- Polozec, Cockcroft-Walton Voltage Multiplier, Nov. 2016, 10.13140RG.2.2.35788.82564Документ9 страницPolozec, Cockcroft-Walton Voltage Multiplier, Nov. 2016, 10.13140RG.2.2.35788.82564Denis JaissonОценок пока нет
- Bandpass Project PDFДокумент13 страницBandpass Project PDFarjun aluОценок пока нет
- Fast Technique For Computing Syndromes of B.C.H. and Reed-Solomon CodesДокумент2 страницыFast Technique For Computing Syndromes of B.C.H. and Reed-Solomon CodesRAJKUMAR SAMIKKANNUОценок пока нет
- LMS Algorithm It6303 - 4 PDFДокумент103 страницыLMS Algorithm It6303 - 4 PDFprakashroutОценок пока нет
- Structured Multivariable Phase Margin Analysis With Applications To A Missile AutopilotДокумент9 страницStructured Multivariable Phase Margin Analysis With Applications To A Missile AutopilotjrbaronОценок пока нет
- The Discrete Wavelet Transform For Image CompressionДокумент26 страницThe Discrete Wavelet Transform For Image CompressionRavinder Pal Singh HarryОценок пока нет
- A Comparison Analysis of Hexagonal Multilevel QAM and Rectangular Multilevel QAMДокумент19 страницA Comparison Analysis of Hexagonal Multilevel QAM and Rectangular Multilevel QAMvmaizОценок пока нет
- Trans LinesДокумент8 страницTrans LinesariehashimieОценок пока нет
- Lecture 2: Discrete-Time Systems and Z-TransformДокумент18 страницLecture 2: Discrete-Time Systems and Z-TransformFaheem AbbasiОценок пока нет
- Efficiently Vlsirealizable Prototype Filters For Modulated FilteДокумент4 страницыEfficiently Vlsirealizable Prototype Filters For Modulated FilteSAJAN P PHILIP BITОценок пока нет
- Image Compression 2011Документ52 страницыImage Compression 2011sprynavidОценок пока нет
- Proiect AnteneДокумент20 страницProiect AnteneAndrei DuțanОценок пока нет
- Wavelets (Chapter 7) : CS474/674 - Prof. BebisДокумент109 страницWavelets (Chapter 7) : CS474/674 - Prof. Bebissrc0108Оценок пока нет
- FFTДокумент28 страницFFTFan Wang100% (2)
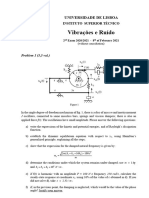
- Exam Vibrations and NoiseДокумент5 страницExam Vibrations and NoisejoaoftabreuОценок пока нет
- Part BДокумент16 страницPart BRamakrishnan Harihara VenkatasubramaniaОценок пока нет
- SSP 2012 Problems (Master)Документ3 страницыSSP 2012 Problems (Master)Lê Thanh HùngОценок пока нет
- Arbitrary-Norm Separating PlaneДокумент12 страницArbitrary-Norm Separating PlaneChengHungHonОценок пока нет
- EP 5511 - Lecture 07Документ33 страницыEP 5511 - Lecture 07Solomon Tadesse AthlawОценок пока нет
- Lec8 - Transform Coding (JPG)Документ39 страницLec8 - Transform Coding (JPG)Ali AhmedОценок пока нет
- Lock-In Amplifier ReportДокумент14 страницLock-In Amplifier ReportDaniel VergaraОценок пока нет
- Pipelined CORDIC Design On FPGA For A Digital Sine and Cosine Waves GeneratorДокумент4 страницыPipelined CORDIC Design On FPGA For A Digital Sine and Cosine Waves GeneratorMohamed GanounОценок пока нет
- Dielectric Slab Waveguide: 1 Total Internal ReflectionДокумент3 страницыDielectric Slab Waveguide: 1 Total Internal Reflectionjas dwanОценок пока нет
- GATE EC 2017 (Set - 2) QuestionsДокумент8 страницGATE EC 2017 (Set - 2) QuestionsZakariya MohammedОценок пока нет
- Uniform Relativistic Acceleration PDFДокумент15 страницUniform Relativistic Acceleration PDFJedwin VillanuevaОценок пока нет
- Voltage Tracking of A Multi-Input InterleavedДокумент4 страницыVoltage Tracking of A Multi-Input InterleavedREYES APOLONIO CASTRO CORRALОценок пока нет
- 3 Sampling PDFДокумент20 страниц3 Sampling PDFWaqas QammarОценок пока нет
- An Improved Denoising Method Based On Stationary Wavelet TransformДокумент5 страницAn Improved Denoising Method Based On Stationary Wavelet Transformceeri paoneОценок пока нет
- From: Powered by ©Документ28 страницFrom: Powered by ©Vivek KumarОценок пока нет
- 1 s2.0 S1474667016377849 MainДокумент6 страниц1 s2.0 S1474667016377849 Mainprachi singhОценок пока нет
- Computing Room Acoustics With CUDA - 3D FDTD Schem PDFДокумент4 страницыComputing Room Acoustics With CUDA - 3D FDTD Schem PDFLavkeshKumarОценок пока нет
- B.Suresh Kumar Ap/Ece Tkec Ec6502 PDSP Two MarksДокумент14 страницB.Suresh Kumar Ap/Ece Tkec Ec6502 PDSP Two MarksSuresh KumarОценок пока нет
- (SAC, BIC, XOR, LAT, AWD) On Some Cryptographic Properties of Rijndael (Yucel)Документ12 страниц(SAC, BIC, XOR, LAT, AWD) On Some Cryptographic Properties of Rijndael (Yucel)Alsita Putri IrianaОценок пока нет
- Lecture 12Документ33 страницыLecture 12Jaafar AbbakarОценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- 01 40 00 - Quality RequirementsДокумент27 страниц01 40 00 - Quality RequirementsshauhramОценок пока нет
- Odi2-065r16m18s02-Q DS 0-0-0Документ3 страницыOdi2-065r16m18s02-Q DS 0-0-0leolima trustitОценок пока нет
- D Praveen Kumar ChaubeyДокумент2 страницыD Praveen Kumar ChaubeyyouvsyouОценок пока нет
- How To Draw and Read Line Diagrams Onboard Ships?: ShareДокумент9 страницHow To Draw and Read Line Diagrams Onboard Ships?: ShareShaif uddin rifatОценок пока нет
- Architecture Concerns of TST and NATO TST ToolДокумент9 страницArchitecture Concerns of TST and NATO TST Tooldorupara718747Оценок пока нет
- Safety Is Your Top Priority: Explosion-Proof LED LightingДокумент62 страницыSafety Is Your Top Priority: Explosion-Proof LED LightingPhi LongОценок пока нет
- SG-05 Safety Guideline For Illumination at WorkplaceДокумент5 страницSG-05 Safety Guideline For Illumination at WorkplacebsrchandruОценок пока нет
- Training CoursesДокумент16 страницTraining CoursesFeroz KhanОценок пока нет
- Body of Knowledge PDFДокумент1 страницаBody of Knowledge PDFAda RamirezОценок пока нет
- Building Applications in C# - InTLДокумент682 страницыBuilding Applications in C# - InTLMustehsan Armaghan Ghouri Magkacgck100% (1)
- CV Mayank Shekhar Dwivedi IITBДокумент4 страницыCV Mayank Shekhar Dwivedi IITBGoutam GiriОценок пока нет
- Single Aisle Technical Training Manual T1 (CFM 56) (LVL 2&3) LightsДокумент44 страницыSingle Aisle Technical Training Manual T1 (CFM 56) (LVL 2&3) LightsarunОценок пока нет
- Bansilal Ramnath Agarwal Charitable Trust'sДокумент2 страницыBansilal Ramnath Agarwal Charitable Trust'sJennifer WaltonОценок пока нет
- BEP Pages 5 16Документ12 страницBEP Pages 5 16Amy LauОценок пока нет
- A Interview QuestionsДокумент363 страницыA Interview QuestionsJaishankar RenganathanОценок пока нет
- ESPRIT Milling Tutorial 02Документ11 страницESPRIT Milling Tutorial 02Sandaruwan සුජීවОценок пока нет
- Legend:-: General Arrangement ACS550-124A-4 YN3A205086-GAAДокумент12 страницLegend:-: General Arrangement ACS550-124A-4 YN3A205086-GAANeeraj SharmaОценок пока нет
- Catalogo EpirocДокумент7 страницCatalogo EpirocAngel García0% (1)
- Seafrost BD50F Refrigerator SystemДокумент7 страницSeafrost BD50F Refrigerator SystemMathiyazhagan SОценок пока нет
- Business Plan On Plastic Recycling & ManufacturingДокумент19 страницBusiness Plan On Plastic Recycling & ManufacturingSah Sanjiv KumarОценок пока нет
- The PA Bible Addn 03 Microphones PDFДокумент4 страницыThe PA Bible Addn 03 Microphones PDFjosiasns5257100% (1)
- INSPECTION-REPORT-OF-RIVER-CHANNEL-IN-BRGY Ponong in Magarao, Camarines SurДокумент3 страницыINSPECTION-REPORT-OF-RIVER-CHANNEL-IN-BRGY Ponong in Magarao, Camarines SurBerp OnrubiaОценок пока нет
- Pre Check: 1. Vgrs System DescriptionДокумент8 страницPre Check: 1. Vgrs System DescriptionNickОценок пока нет
- 3000w Inverter Parts ListДокумент6 страниц3000w Inverter Parts ListayoowuyeОценок пока нет
- TDG11Документ100 страницTDG11Splycho GoranОценок пока нет
- 09 Technical TablesДокумент8 страниц09 Technical TablesRuban Vijaya SinghОценок пока нет
- V7.0 Function ListДокумент48 страницV7.0 Function ListInyectronix VyhОценок пока нет
- 2013 OSPE Salary Survey PDFДокумент20 страниц2013 OSPE Salary Survey PDFdarinscottjohnsonОценок пока нет
- FMS 2009 Question Paper and Answer KeyДокумент6 страницFMS 2009 Question Paper and Answer KeyHarish PotterОценок пока нет
- Technical Brochure Metal Ceilings V100-V200-en EUДокумент12 страницTechnical Brochure Metal Ceilings V100-V200-en EUNicu PotîngОценок пока нет