Вам также может понравиться
- Fiche de Poste Personnel Educatif AVAДокумент2 страницыFiche de Poste Personnel Educatif AVASofiene GuedriОценок пока нет
- 4.demande DindemnisationДокумент1 страница4.demande DindemnisationSofiene GuedriОценок пока нет
- 11 Lois Binom Poisson SolДокумент4 страницы11 Lois Binom Poisson SolSofiene GuedriОценок пока нет
- 19.extension Assurance Voiture A Adresser A Sa CompagnieДокумент1 страница19.extension Assurance Voiture A Adresser A Sa CompagnieSofiene GuedriОценок пока нет
- 28.demande D'information Pour Un Capital DecesДокумент1 страница28.demande D'information Pour Un Capital DecesSofiene GuedriОценок пока нет
- Gestion Des Conflits Au TravailДокумент179 страницGestion Des Conflits Au TravailSofiene GuedriОценок пока нет
- CV Canadien 1692024430Документ3 страницыCV Canadien 1692024430loubnaОценок пока нет
- 4 Retro PropagationДокумент30 страниц4 Retro PropagationSofiene GuedriОценок пока нет
- ColombaДокумент115 страницColombaSofiene GuedriОценок пока нет
- Cvtemplate 10Документ3 страницыCvtemplate 10Sofiene GuedriОценок пока нет
- Maxime GueriauДокумент14 страницMaxime GueriauSofiene Guedri100% (1)
- 1372320914Документ10 страниц1372320914Sofiene GuedriОценок пока нет
- Exo ThermoДокумент24 страницыExo ThermoSofiene Guedri100% (1)
- 0915933Документ40 страниц0915933Sofiene GuedriОценок пока нет
- JijiДокумент208 страницJijiBadr EzzidiОценок пока нет
- TF 2005861Документ16 страницTF 2005861Sofiene GuedriОценок пока нет
- Corrige Marchandises 2015Документ20 страницCorrige Marchandises 2015Sofiene Guedri83% (6)
- Sciences Industrielles Pour L'ingénieur: Méthodes Et ExercicesДокумент23 страницыSciences Industrielles Pour L'ingénieur: Méthodes Et ExercicesSofiene GuedriОценок пока нет
- Stratégie Du Ministère de L'équipement Et Du TransportДокумент11 страницStratégie Du Ministère de L'équipement Et Du TransportJalil BouhdidОценок пока нет
- RNДокумент4 страницыRNSofiene GuedriОценок пока нет
- CH 1Документ18 страницCH 1Sofiene GuedriОценок пока нет
- Economie Des Transports M1Документ122 страницыEconomie Des Transports M1Sofiene Guedri100% (2)
- 7408417Документ48 страниц7408417Sofiene GuedriОценок пока нет
- 1 PDFДокумент16 страниц1 PDFSofiene GuedriОценок пока нет
- Ocde 72-18 PDFДокумент158 страницOcde 72-18 PDFSofiene GuedriОценок пока нет
- Sciences Industrielles Pour L'ingénieur: Méthodes Et ExercicesДокумент23 страницыSciences Industrielles Pour L'ingénieur: Méthodes Et ExercicesSofiene GuedriОценок пока нет
- 9782311401714Документ10 страниц9782311401714Sofiene GuedriОценок пока нет
- Science IngenieurДокумент216 страницScience Ingenieursimoniko100% (7)
- English Tenses - Examples (Traduit Vers Français)Документ1 страницаEnglish Tenses - Examples (Traduit Vers Français)Sofiene GuedriОценок пока нет
- COMPOSITION 2nde AU FLAMBEAUДокумент3 страницыCOMPOSITION 2nde AU FLAMBEAUamadoury85Оценок пока нет
- Porteur de Vie GratuitДокумент98 страницPorteur de Vie GratuitNy Laza Alexias RandrianoelinaОценок пока нет
- CE6-Les Premiers Concepts de La GéométrieДокумент2 страницыCE6-Les Premiers Concepts de La GéométrieRachid Bensalim (team nethers)Оценок пока нет
- Microsoft Official Course: Déploiement Et Gestion de Windows Server 2012Документ38 страницMicrosoft Official Course: Déploiement Et Gestion de Windows Server 2012ZaimОценок пока нет
- Cryptographie Et Algorithmique: Table Des MatièresДокумент15 страницCryptographie Et Algorithmique: Table Des MatièresTeuma Mbezi MichelОценок пока нет
- Applications Linéaires: Etude de LinéaritéДокумент37 страницApplications Linéaires: Etude de Linéaritéchentouf fatima-zahraeОценок пока нет
- LA Part Du Politique Dans L'attentat de Yassmina KHADRAДокумент62 страницыLA Part Du Politique Dans L'attentat de Yassmina KHADRAChérine HassanОценок пока нет
- Installation D'adobe Acrobat Reader Sous WindowsДокумент10 страницInstallation D'adobe Acrobat Reader Sous WindowsNiane Technologie (NTechSN)Оценок пока нет
- Le Fonctionnement en Interruption 1Документ2 страницыLe Fonctionnement en Interruption 1maoukil ayoubОценок пока нет
- Verbes Irréguliers Au SubjonctifДокумент2 страницыVerbes Irréguliers Au SubjonctifNouri38100% (11)
- Les Fiures de Style Dans Souffle de Pétales de Faiza AcitniДокумент83 страницыLes Fiures de Style Dans Souffle de Pétales de Faiza Acitnikaoutar whbОценок пока нет
- Nicholas Ma - Happy Birthday But 13 Classical Composers Are Fighting Over The Last Slice of CakeДокумент22 страницыNicholas Ma - Happy Birthday But 13 Classical Composers Are Fighting Over The Last Slice of Cake문태일방구문방구100% (2)
- Tp1-Installation Et Configuration de Base de Windows 2019 ServerДокумент2 страницыTp1-Installation Et Configuration de Base de Windows 2019 ServerAyman Tijani100% (2)
- Correction Série TD 1Документ5 страницCorrection Série TD 1Younes BoucherifОценок пока нет
- 98-381 QuestionsДокумент19 страниц98-381 QuestionsRafik Youssef MabroukОценок пока нет
- PROJET-de Cycle de Vie D'une Activite Sous AndroidДокумент6 страницPROJET-de Cycle de Vie D'une Activite Sous AndroidEmile LoviОценок пока нет
- Activité 6 Verbes en - ErДокумент2 страницыActivité 6 Verbes en - ErJIMMY ALEJANDRO LOAIZA100% (1)
- Éperonner Le Monde. Nomadisme, Cosmos Et Politique Chez Les TouaregsДокумент202 страницыÉperonner Le Monde. Nomadisme, Cosmos Et Politique Chez Les TouaregsHafizShirazi80% (5)
- La Grammaire Française OverviewДокумент1 страницаLa Grammaire Française OverviewShauna Lucia SweeneyОценок пока нет
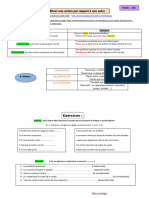
- Public: 2AC: Activité de Langue: Situer Une Action Par Rapport À Une AutreДокумент2 страницыPublic: 2AC: Activité de Langue: Situer Une Action Par Rapport À Une AutreNatalia GalasОценок пока нет
- Sequence1 4eme MaupassantДокумент29 страницSequence1 4eme MaupassantAndressa KhouryОценок пока нет
- Exam2018fevrierentrepot de DonnéessanscorrectionДокумент5 страницExam2018fevrierentrepot de DonnéessanscorrectionAbdelhalim BoudraaОценок пока нет
- Dictees CM1 CM2 Periode 4Документ3 страницыDictees CM1 CM2 Periode 4cheikhatthiombaneОценок пока нет
- PremiereNSI TD Rurple 2021Документ4 страницыPremiereNSI TD Rurple 2021Abdelhak FadiliОценок пока нет
- Partie 3 CentДокумент30 страницPartie 3 CentTribu LactéeОценок пока нет
- °°tds Analyse5 Sma3 Fsm-Meknes 20-21Документ17 страниц°°tds Analyse5 Sma3 Fsm-Meknes 20-21HoussamОценок пока нет
- Exercice 2Документ28 страницExercice 2charlotte fernandesОценок пока нет
- B53 3070 - Aços Planos Laminados A Quente Ou A FrioДокумент8 страницB53 3070 - Aços Planos Laminados A Quente Ou A FrioThiago SilvaОценок пока нет
- Les Algorithmes Gloutons: II.1 Une Résolution BruteДокумент10 страницLes Algorithmes Gloutons: II.1 Une Résolution BruteklaynОценок пока нет
- 01 - Brochure 2017Документ156 страниц01 - Brochure 2017angel dauneОценок пока нет