Вам также может понравиться
- Lect2 - 1151 - Grillage AnalysisДокумент31 страницаLect2 - 1151 - Grillage AnalysisCheong100% (1)
- Microeconomic Theory Basic Principles and Extensions 12th Edition Nicholson Solutions ManualДокумент31 страницаMicroeconomic Theory Basic Principles and Extensions 12th Edition Nicholson Solutions Manualslacklyroomage6kmd6100% (25)
- Solutions OddДокумент74 страницыSolutions OddBob CrossОценок пока нет
- IMO 2005 ShortlistДокумент51 страницаIMO 2005 ShortlistAdnan GobeljićОценок пока нет
- Physics 1 - Problems With SolutionsДокумент47 страницPhysics 1 - Problems With SolutionsMichaelОценок пока нет
- Finalspring 2022Документ9 страницFinalspring 2022Muhammad KhalilОценок пока нет
- 11 Annual Harvard-MIT Mathematics TournamentДокумент3 страницы11 Annual Harvard-MIT Mathematics TournamentHaikal M RoyyanОценок пока нет
- 10-725/36-725 Optimization Midterm Exam: NameДокумент10 страниц10-725/36-725 Optimization Midterm Exam: NamehassanОценок пока нет
- TMA4180 Solutions To Recommended Exercises in Chapter 12 of N&WДокумент4 страницыTMA4180 Solutions To Recommended Exercises in Chapter 12 of N&WNickОценок пока нет
- HW 06Документ2 страницыHW 06Alexander BennettОценок пока нет
- Completeexam NosolutionsДокумент6 страницCompleteexam NosolutionsadoplhОценок пока нет
- DMC ExQuiz SolДокумент112 страницDMC ExQuiz SolRafe AОценок пока нет
- Dwnload Full Microeconomic Theory Basic Principles and Extensions 12th Edition Nicholson Solutions Manual PDFДокумент36 страницDwnload Full Microeconomic Theory Basic Principles and Extensions 12th Edition Nicholson Solutions Manual PDFscantletdecumanszfdq100% (12)
- HeatsolnДокумент2 страницыHeatsolnmayankОценок пока нет
- Training 08 - 03 - 2003Документ2 страницыTraining 08 - 03 - 2003นรพนธ์ อุสาใจОценок пока нет
- Tentalosning TMA947 070312 2Документ6 страницTentalosning TMA947 070312 2salimОценок пока нет
- Ode Q&aДокумент12 страницOde Q&aJohnОценок пока нет
- Assignment 1 SolutionДокумент5 страницAssignment 1 SolutionsamsОценок пока нет
- Official Solutions For CMO 2022: © 2022, Canadian Mathematical Society. All Rights ReservedДокумент7 страницOfficial Solutions For CMO 2022: © 2022, Canadian Mathematical Society. All Rights ReservedCorneliaОценок пока нет
- Cal Exam - Apr 2022 FUV - SolnsДокумент3 страницыCal Exam - Apr 2022 FUV - SolnsNuong PhanОценок пока нет
- Feb 2005 SolutionsДокумент4 страницыFeb 2005 Solutionspaul taniwanОценок пока нет
- Creative 2017 26 2 153 162Документ10 страницCreative 2017 26 2 153 162Fustei BogdanОценок пока нет
- Calculus Exercises 2 SolutionsДокумент7 страницCalculus Exercises 2 SolutionsHenkОценок пока нет
- 10 Problems For HOMC 2019: Nguyen Quang Tan March 20, 2019Документ7 страниц10 Problems For HOMC 2019: Nguyen Quang Tan March 20, 2019Nguyễn Quang TânОценок пока нет
- Chapter 3, Lecture 6: Broyden's Method: This Document Comes From The Math 484 Course WebpageДокумент5 страницChapter 3, Lecture 6: Broyden's Method: This Document Comes From The Math 484 Course Webpageparadoja_hiperbolicaОценок пока нет
- IMC Simulation: June 15, 2009Документ4 страницыIMC Simulation: June 15, 2009Syaifullah MangantjoОценок пока нет
- Mathematics For Microeconomics: 6y y U, 8x X UДокумент8 страницMathematics For Microeconomics: 6y y U, 8x X UAsia ButtОценок пока нет
- BDFBDFBDFBDFДокумент5 страницBDFBDFBDFBDFkwonsoonieОценок пока нет
- Equationsb YcmaДокумент10 страницEquationsb YcmaAnan LeeОценок пока нет
- Chapter 4 PDEДокумент17 страницChapter 4 PDEHui JingОценок пока нет
- Math207-Assignment IIIДокумент1 страницаMath207-Assignment IIIBinoОценок пока нет
- Capitulo 4Документ6 страницCapitulo 4jenniferОценок пока нет
- Bareme Moisil 2018 LiceuДокумент4 страницыBareme Moisil 2018 LiceuAndrei346Оценок пока нет
- Answers 5 2012Документ11 страницAnswers 5 2012Eric KerrОценок пока нет
- Aitchison Hay Solutions 1 PDFДокумент37 страницAitchison Hay Solutions 1 PDFJovan JovanovicОценок пока нет
- A First Course in String Theory.: Second EditionДокумент202 страницыA First Course in String Theory.: Second EditionCristin LeeОценок пока нет
- Feb 2008 SolutionsДокумент3 страницыFeb 2008 Solutionspaul taniwanОценок пока нет
- Solutions To Tutorial 1 (Week 2) : Lecturers: Daniel Daners and James ParkinsonДокумент11 страницSolutions To Tutorial 1 (Week 2) : Lecturers: Daniel Daners and James ParkinsonTOM DAVISОценок пока нет
- Tartar Vtrmc09Документ1 страницаTartar Vtrmc09TrungNguyễnChíОценок пока нет
- Steepest DescentДокумент4 страницыSteepest DescentvaraduОценок пока нет
- Quardatic Equation-02-Solved ExamДокумент14 страницQuardatic Equation-02-Solved ExamRaju SinghОценок пока нет
- Solution Manual For Microeconomic TheoryДокумент8 страницSolution Manual For Microeconomic TheoryChristian Jo Enriquez100% (1)
- Homework Sol3Документ4 страницыHomework Sol3claudia0510Оценок пока нет
- Solutions To Sample Final QuestionsДокумент28 страницSolutions To Sample Final QuestionscfisicasterОценок пока нет
- Notes On ExercisesДокумент44 страницыNotes On ExercisesYokaОценок пока нет
- HMMT Feb2020 B PDFДокумент7 страницHMMT Feb2020 B PDFashrithОценок пока нет
- Calc3exam1spr06soln PDFДокумент3 страницыCalc3exam1spr06soln PDFvikas_ojha54706Оценок пока нет
- Chapter 2Документ9 страницChapter 2Sruthi NukalaОценок пока нет
- Math54 Teleman Final 2011spring SolnДокумент3 страницыMath54 Teleman Final 2011spring SolntehkronosОценок пока нет
- Calculus of Variations ProjectДокумент10 страницCalculus of Variations ProjectBrianWeathersОценок пока нет
- Manifolds, Tensor Analysis and Applications 3rd Ed. - Marsden, Ratiu and AbrahamДокумент21 страницаManifolds, Tensor Analysis and Applications 3rd Ed. - Marsden, Ratiu and AbrahamSreerag S KumarОценок пока нет
- Hu2010 Article IterationCalculationsOfPeriodiДокумент6 страницHu2010 Article IterationCalculationsOfPeriodiIdris anderson Dzeugoua DjibouengОценок пока нет
- Assignment 2Документ5 страницAssignment 2Thanh NguyenОценок пока нет
- UnconstrainedOptimization VIIIДокумент42 страницыUnconstrainedOptimization VIIIarvind kumarОценок пока нет
- Homework 2 SolutionsДокумент7 страницHomework 2 SolutionszzytrasihotangОценок пока нет
- 2013 Ui Mock Putnam Exam September 25, 2013, 5 PM - 7 PM SolutionsДокумент4 страницы2013 Ui Mock Putnam Exam September 25, 2013, 5 PM - 7 PM SolutionsGag PafОценок пока нет
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОт EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОценок пока нет
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)От EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Оценок пока нет
- Priest, Graham - The Logic of The Catuskoti (2010)Документ31 страницаPriest, Graham - The Logic of The Catuskoti (2010)Alan Ruiz100% (1)
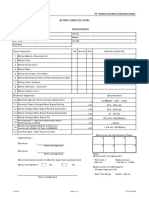
- Battery Checklist ProcedureДокумент1 страницаBattery Checklist ProcedureKrauser ChanelОценок пока нет
- Sainik School Balachadi: Name-Class - Roll No - Subject - House - Assigned byДокумент10 страницSainik School Balachadi: Name-Class - Roll No - Subject - House - Assigned byPagalОценок пока нет
- Enzymes IntroДокумент33 страницыEnzymes IntropragyasimsОценок пока нет
- B. Inggris X - 7Документ8 страницB. Inggris X - 7KabardiantoОценок пока нет
- Sales Forecast Template DownloadДокумент9 страницSales Forecast Template DownloadAshokОценок пока нет
- SDN Van NotesДокумент26 страницSDN Van Notesmjsmith11Оценок пока нет
- 32 Hyderabad HITEC City BisleriДокумент23 страницы32 Hyderabad HITEC City BisleriSridhar ViswanathanОценок пока нет
- Low Voltage Switchgear Specification: 1. ScopeДокумент6 страницLow Voltage Switchgear Specification: 1. ScopejendrikoОценок пока нет
- Reaserch On Effect of Social Media On Academic Performance: Study On The Students of University of DhakaДокумент27 страницReaserch On Effect of Social Media On Academic Performance: Study On The Students of University of DhakaFatema Tuz Johoora88% (114)
- Openvpn ReadmeДокумент7 страницOpenvpn Readmefzfzfz2014Оценок пока нет
- Zimbabwe - Medical - CPIN - v2.0 - GOV - UKДокумент39 страницZimbabwe - Medical - CPIN - v2.0 - GOV - UKsammy redganjiОценок пока нет
- CAREДокумент11 страницCARELuis SementeОценок пока нет
- Gastroesophagea L of Reflux Disease (GERD)Документ34 страницыGastroesophagea L of Reflux Disease (GERD)Alyda Choirunnissa SudiratnaОценок пока нет
- Truss-Design 18mДокумент6 страницTruss-Design 18mARSEОценок пока нет
- Benedict Anderson, Imagined CommunitiesДокумент2 страницыBenedict Anderson, Imagined CommunitiesMonir Amine0% (1)
- Aribah Ahmed CertificateДокумент2 страницыAribah Ahmed CertificateBahadur AliОценок пока нет
- Pelayo PathopyhsiologyДокумент13 страницPelayo PathopyhsiologyE.J. PelayoОценок пока нет
- LLM Letter Short LogoДокумент1 страницаLLM Letter Short LogoKidMonkey2299Оценок пока нет
- 9881 enДокумент345 страниц9881 enSaid BenОценок пока нет
- Prognostic Factors and Management of Patients With Choanal AtresiaДокумент7 страницPrognostic Factors and Management of Patients With Choanal Atresiafarah maulida martaОценок пока нет
- IOT Architecture IIДокумент29 страницIOT Architecture IIfaisul faryОценок пока нет
- Group 2 ITI Consensus Report: Prosthodontics and Implant DentistryДокумент9 страницGroup 2 ITI Consensus Report: Prosthodontics and Implant DentistryEsme ValenciaОценок пока нет
- Benjamin Franklin - The Indian Treaties (1938)Документ450 страницBenjamin Franklin - The Indian Treaties (1938)Spiritu SanctoОценок пока нет
- Republic of The Philippines Division of Bohol Department of Education Region VII, Central VisayasДокумент6 страницRepublic of The Philippines Division of Bohol Department of Education Region VII, Central VisayasJOHN MC RAE RACINESОценок пока нет
- Boarding House Preferences by Middle Up Class Students in SurabayaДокумент8 страницBoarding House Preferences by Middle Up Class Students in Surabayaeditor ijeratОценок пока нет
- The Great Muslim Scientist - Imam Jaffer Sadiq (AДокумент78 страницThe Great Muslim Scientist - Imam Jaffer Sadiq (ASalman Book Centre100% (2)
- A2Документ4 страницыA2Akshay KumarОценок пока нет
- Reaction Paper FinalДокумент5 страницReaction Paper FinalJelo RoxasОценок пока нет