Вам также может понравиться
- Proyecto de Aula. Ii SemestreДокумент22 страницыProyecto de Aula. Ii SemestreJuan Sebastian Ochoa PeñaОценок пока нет
- Citrus Z450Документ2 страницыCitrus Z450elvis oriasОценок пока нет
- Plan de Estudios Electronica - UNSAДокумент1 страницаPlan de Estudios Electronica - UNSAAngel AstorgaОценок пока нет
- Multiplexores y DemultiplexoresДокумент4 страницыMultiplexores y DemultiplexoresFreddy Guzmán AlarcónОценок пока нет
- Taller No 3 Integración Por PartesДокумент3 страницыTaller No 3 Integración Por Partesginmatitm100% (2)
- Problemas de Lógica CombinacionalДокумент9 страницProblemas de Lógica CombinacionalDiego andresОценок пока нет
- Problemas de Motores Corriente Continua: DepartamentoДокумент26 страницProblemas de Motores Corriente Continua: DepartamentoYerko GutiОценок пока нет
- Sistemas Mecatronicaos MATLABДокумент221 страницаSistemas Mecatronicaos MATLABHomero Vargas AbrilОценок пока нет
- Comunicaciones AlámbricasДокумент26 страницComunicaciones Alámbricasfernando RoseroОценок пока нет
- Practica Numero 3Документ5 страницPractica Numero 3Victor Alfonso Montero JavierОценок пока нет
- José Martin Casado MárquezДокумент1 страницаJosé Martin Casado Márquezwtwtwtff0% (1)
- Control de Robots: LIMA, 28 de Mayo de 2021Документ11 страницControl de Robots: LIMA, 28 de Mayo de 2021Leo MarxialОценок пока нет
- Robot BomberoДокумент6 страницRobot Bomberocarolina abigail jimenez cortezОценок пока нет
- Analisis Experimental de Circuitos RLC en Estado TransitorioДокумент28 страницAnalisis Experimental de Circuitos RLC en Estado TransitorioGiron LeonardoОценок пока нет
- PR3 Taylor PDFДокумент6 страницPR3 Taylor PDFGeorge Hans SterlingОценок пока нет
- 2019 B PDS CAP 02 Dominio TransformadoДокумент52 страницы2019 B PDS CAP 02 Dominio TransformadoJoseQuispeCamiОценок пока нет
- Capitulo 3 Libro Shaum Circuitos DigitalesДокумент62 страницыCapitulo 3 Libro Shaum Circuitos DigitalesKatherine María Zambrano CasasОценок пока нет
- Interfaz Arduino-MatlabДокумент19 страницInterfaz Arduino-MatlabJeffersonQuichimboОценок пока нет
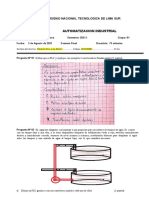
- Examen Final Automatizacion Industrial 2021 A - Sánchez Ríos, Luis AlbertoДокумент4 страницыExamen Final Automatizacion Industrial 2021 A - Sánchez Ríos, Luis AlbertoLUIS ALBERTO SANCHEZ RIOSОценок пока нет
- Solucionario Sustitutorio 21 1Документ9 страницSolucionario Sustitutorio 21 1jhonajhonaОценок пока нет
- Laboratorio-Metodos Numericos MATLABДокумент45 страницLaboratorio-Metodos Numericos MATLABronald huancachoque ariasОценок пока нет
- 1Документ9 страниц1Entretuymilmares AragonОценок пока нет
- Instrucciones Aritmeticas At89s52Документ8 страницInstrucciones Aritmeticas At89s52ElBuenDany0% (1)
- Proyecto Estabilidad de Sistemas de Potencia IE-624 Grupo #3Документ17 страницProyecto Estabilidad de Sistemas de Potencia IE-624 Grupo #3Timoty AvilaОценок пока нет
- Resolución Del Problema Cinemático Del Robot Articular de 2 Grados de LibertadДокумент11 страницResolución Del Problema Cinemático Del Robot Articular de 2 Grados de LibertadElias Gutierrez MendozaОценок пока нет
- Dinamica RRPRДокумент40 страницDinamica RRPREdgar Andres Cevallos RamirezОценок пока нет
- LABMecánica - 2. Determinación Del Coeficiente de FricciónДокумент7 страницLABMecánica - 2. Determinación Del Coeficiente de FricciónSam CastillejoОценок пока нет
- Sistema Control Clasico Pc1Документ5 страницSistema Control Clasico Pc1Manuel Bernal LoroОценок пока нет
- Diseño de Maquinas de EstadoДокумент14 страницDiseño de Maquinas de EstadoBayron Leandro Rosero HuertasОценок пока нет
- Cap05 PDFДокумент64 страницыCap05 PDFRuth Maria Tapia AguilarОценок пока нет
- Ecuaciones DiferencialesДокумент237 страницEcuaciones DiferencialesMarito100% (1)
- Vista Explosionada Pistola de RiegoДокумент2 страницыVista Explosionada Pistola de RiegoAlmir BeltránОценок пока нет
- Normalización de Funciones de Red - v2Документ1 страницаNormalización de Funciones de Red - v2Adolfo LladorОценок пока нет
- Practica 4Документ12 страницPractica 4bryanvelesacaОценок пока нет
- Ips2022 Pu1Документ3 страницыIps2022 Pu1LucianoLoyolaОценок пока нет
- Tercer Laboratorio de Ingenieria de Control I.doc RenzoДокумент5 страницTercer Laboratorio de Ingenieria de Control I.doc RenzoEJ AlvarezОценок пока нет
- Aplicaciones de La Transformada de LaplaceДокумент6 страницAplicaciones de La Transformada de LaplaceDartexx xОценок пока нет
- Red de TuberiasДокумент13 страницRed de TuberiasGonzalo EnriqueОценок пока нет
- Volantes de InerciaДокумент25 страницVolantes de InerciaJesus RuizОценок пока нет
- Tarea 1Документ11 страницTarea 1Fernando MendozaОценок пока нет
- Ibio 2260 Modelado y Simulacion de Sistemas Biomedicos PDFДокумент4 страницыIbio 2260 Modelado y Simulacion de Sistemas Biomedicos PDFSantiago CifuentesОценок пока нет
- Contador JohnsonДокумент7 страницContador JohnsonNelson Pato Suárez0% (1)
- 1ra Práctica Calificada de Máq. Eléctricas Est y Rotativas (I36N) Sección 16777Документ3 страницы1ra Práctica Calificada de Máq. Eléctricas Est y Rotativas (I36N) Sección 16777Angel AlonsoОценок пока нет
- Teoria Electromagnetica 2: Universidad Autónoma de Nuevo León Facultad de Ingeniería Mecánica y EléctricaДокумент29 страницTeoria Electromagnetica 2: Universidad Autónoma de Nuevo León Facultad de Ingeniería Mecánica y Eléctricaveniko66Оценок пока нет
- 100000I23N CursoIntegradorI DisenoElectronicoДокумент4 страницы100000I23N CursoIntegradorI DisenoElectronicoJuan Carlos LudwigОценок пока нет
- Problemas Secciones Conicas Con MatlabДокумент17 страницProblemas Secciones Conicas Con MatlabJOSE CRUZ GOMEZОценок пока нет
- Taller Vectores y MatricesДокумент2 страницыTaller Vectores y MatricesDiego Rios0% (1)
- Final ResueltoДокумент46 страницFinal ResueltoPabloMuñozAlbitesОценок пока нет
- Práctica Calificada 01 de MECANISMOSДокумент9 страницPráctica Calificada 01 de MECANISMOSJunnior SantillanОценок пока нет
- Pendulo Invertido MatlabДокумент11 страницPendulo Invertido MatlabNABEОценок пока нет
- Tema 1 - Problemario de Vectores (Geogebra)Документ1 страницаTema 1 - Problemario de Vectores (Geogebra)Esmeralda Reyes cortez0% (1)
- Problemas Propuestos CuerpoДокумент19 страницProblemas Propuestos CuerpocealbruceОценок пока нет
- Laboratorio de Física I - Movimiento Rectilíneo Con Aceleración ConstanteДокумент9 страницLaboratorio de Física I - Movimiento Rectilíneo Con Aceleración ConstanteHerber Manza ChávezОценок пока нет
- Regulador de Voltaje Con Carga (Jfet K30)Документ5 страницRegulador de Voltaje Con Carga (Jfet K30)PieroA.VillagarayVillagarayОценок пока нет
- Prácticas de Introducción A La Simulación de Sistemas Con MATLABДокумент19 страницPrácticas de Introducción A La Simulación de Sistemas Con MATLABFernando Salomón Merchán GordilloОценок пока нет
- Clase 1 Diseño Electronico 2017 02Документ17 страницClase 1 Diseño Electronico 2017 02cesar cabreraОценок пока нет
- Amplificadores: Sistemas de Ecuaciones DiferencialesДокумент10 страницAmplificadores: Sistemas de Ecuaciones DiferencialesJoan JoseОценок пока нет
- Libro de RoboticaДокумент212 страницLibro de RoboticaRn SaEnzОценок пока нет
- Trabajo Proyecto Integrador (1.1)Документ14 страницTrabajo Proyecto Integrador (1.1)Carlos PeñaОценок пока нет
- Corrección AnteproyectoДокумент7 страницCorrección AnteproyectoAlexis Esteban Rodriguez SandovalОценок пока нет
- Modelo Certificado1Документ1 страницаModelo Certificado1Cienciayarte CienciayartehoyОценок пока нет
- Unidad de Aprendizaje #1 Quinto GradoДокумент7 страницUnidad de Aprendizaje #1 Quinto GradoCienciayarte CienciayartehoyОценок пока нет
- SESIÓN 1-11-15 Tercer GradoДокумент4 страницыSESIÓN 1-11-15 Tercer GradoCienciayarte CienciayartehoyОценок пока нет
- Unidad de Aprendizaje #1 Tercer GradoДокумент7 страницUnidad de Aprendizaje #1 Tercer GradoCienciayarte CienciayartehoyОценок пока нет
- Sesión 1-11-15 Quinto GradoДокумент11 страницSesión 1-11-15 Quinto GradoCienciayarte CienciayartehoyОценок пока нет
- SESIÓN 1 - 11-15 QUINTO GradoДокумент5 страницSESIÓN 1 - 11-15 QUINTO GradoCienciayarte CienciayartehoyОценок пока нет
- SESION 1 - Primer grado-MODELO CRISTIANДокумент3 страницыSESION 1 - Primer grado-MODELO CRISTIANCienciayarte CienciayartehoyОценок пока нет
- Link Master 1 Ofimática 2016 FinalДокумент10 страницLink Master 1 Ofimática 2016 FinalCienciayarte CienciayartehoyОценок пока нет
- Unidad de Aprendizaje #1 Primero SecundariaДокумент7 страницUnidad de Aprendizaje #1 Primero SecundariaCienciayarte CienciayartehoyОценок пока нет
- Emayn Ficha Tecnica Az 1Документ2 страницыEmayn Ficha Tecnica Az 1Jerson Ramos HuertaОценок пока нет
- INFORME DE FISICA. Asociación de Reesistencias.Документ9 страницINFORME DE FISICA. Asociación de Reesistencias.Marlin Julieth LozadaОценок пока нет
- Lab - Asociacion de ResistenciasДокумент6 страницLab - Asociacion de Resistenciassteeven9andre9sayagoОценок пока нет
- Momento DipolarДокумент7 страницMomento DipolarClaudiia TereezaОценок пока нет
- 11 Movimiento CircularДокумент9 страниц11 Movimiento CircularnancyОценок пока нет
- Trabajo p4Документ15 страницTrabajo p4Sixto JimenezОценок пока нет
- Levantamiento Con TeodolitoДокумент23 страницыLevantamiento Con TeodolitoSteven Saenz100% (1)
- Forma Pendiente - Interseccion y Determinacion de Ecuacion86-95Документ10 страницForma Pendiente - Interseccion y Determinacion de Ecuacion86-95victor.montalvoОценок пока нет
- Descripción Del Método MTMДокумент9 страницDescripción Del Método MTMSELENEОценок пока нет
- La Carta de Color It8 PDFДокумент6 страницLa Carta de Color It8 PDFDouglas Segovia P.Оценок пока нет
- Cálculo Del Cortante BasalДокумент9 страницCálculo Del Cortante BasalCarlos Osmel GuevaraОценок пока нет
- Josep Esquirol Entrevista A La ContraДокумент1 страницаJosep Esquirol Entrevista A La ContraferrancabОценок пока нет
- Instrucciones Electro-TesterДокумент2 страницыInstrucciones Electro-TesterCAMILO PALACIOS ZARAMA100% (5)
- Evaporadores EstáticosДокумент9 страницEvaporadores EstáticosRicardoОценок пока нет
- Tema II Primera Ley de La Termodinamica Proyecto IIДокумент35 страницTema II Primera Ley de La Termodinamica Proyecto IIMerelyn Del PiiLar RaMiirez RoManОценок пока нет
- 3º Sesiòn 6 - Eda 2Документ5 страниц3º Sesiòn 6 - Eda 2Maribel Valle RequizОценок пока нет
- Dorsal Del PacíficoДокумент4 страницыDorsal Del PacíficoInstalaciones Eléctricas ResidencialesОценок пока нет
- Trabajo RevistaДокумент9 страницTrabajo RevistaJose PachecoОценок пока нет
- Mapa Conceptual de Potencial ElectricoДокумент1 страницаMapa Conceptual de Potencial ElectricoCINTIA ARACELY RETAMOZA FELIX100% (2)
- Modelo Articulo-UAOДокумент6 страницModelo Articulo-UAOCristian Andres GaitanОценок пока нет
- Problemario 1Документ5 страницProblemario 1John Titor100% (1)
- Guia - ConstДокумент26 страницGuia - Constmirkocubilla24Оценок пока нет
- Clase 6 FUNCIONES CONTINUAS Y DISCONTINUAS - 03Документ23 страницыClase 6 FUNCIONES CONTINUAS Y DISCONTINUAS - 03Nixon AyalaОценок пока нет
- LCNC - Contracción Térmica Inicial Del ConcretoДокумент3 страницыLCNC - Contracción Térmica Inicial Del ConcretoLuis Casely Nina CruzОценок пока нет
- Lab. 1. El MicroscopioДокумент15 страницLab. 1. El MicroscopioAdrian PerezОценок пока нет
- Destrezas MatematicaДокумент10 страницDestrezas MatematicaFranco AlvaradoОценок пока нет
- Calculo para Mover Una Silla de RuedasДокумент9 страницCalculo para Mover Una Silla de RuedasJose Juan Vera MedinaОценок пока нет
- Nuevas Tendencias en El Entrenamiento ConcurrenteДокумент24 страницыNuevas Tendencias en El Entrenamiento ConcurrenteKevin MarcosОценок пока нет
- Cine TicaДокумент8 страницCine TicaCarlosОценок пока нет