Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- ECR Burner With Control SystemДокумент4 страницыECR Burner With Control Systemnagagop930100% (1)
- Centrifugal Fans - FlaktwoodsДокумент45 страницCentrifugal Fans - Flaktwoodsnagagop930100% (2)
- CD 4060Документ10 страницCD 4060ahocine2011Оценок пока нет
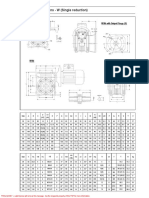
- Mounting Dimensions - W (Single Reduction) : WSM With Output Flange (V) WSDДокумент1 страницаMounting Dimensions - W (Single Reduction) : WSM With Output Flange (V) WSDnagagop930Оценок пока нет
- MVS-SVE Chapter10 PDFДокумент52 страницыMVS-SVE Chapter10 PDFnagagop930Оценок пока нет
- Ramson Steam Boiler RateДокумент9 страницRamson Steam Boiler Ratenagagop930Оценок пока нет
- Bridges PDFДокумент6 страницBridges PDFnagagop930Оценок пока нет
- Abacus CalculationДокумент4 страницыAbacus Calculationnagagop930Оценок пока нет
- Dsa00402039 PDFДокумент1 страницаDsa00402039 PDFnagagop930Оценок пока нет
- Dsa00402040 PDFДокумент1 страницаDsa00402040 PDFnagagop930Оценок пока нет
- Heater Calculation1Документ23 страницыHeater Calculation1nagagop930Оценок пока нет
- Aosong Electronics Co.,LtdДокумент10 страницAosong Electronics Co.,Ltdnagagop930Оценок пока нет
- Kern Method Heat ExchangerДокумент30 страницKern Method Heat ExchangerCS100% (3)
- CDLF Series O M 1Документ4 страницыCDLF Series O M 1nagagop930Оценок пока нет