Вам также может понравиться
- PID ControlДокумент22 страницыPID ControlJessica RossОценок пока нет
- Art:10.1007/s00340 003 1342 0Документ7 страницArt:10.1007/s00340 003 1342 0saranyaОценок пока нет
- Andor Learning Raman Spectros PDFДокумент4 страницыAndor Learning Raman Spectros PDFsaranyaОценок пока нет
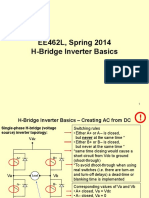
- 10 EE462L H Bridge Inverter BasicsДокумент28 страниц10 EE462L H Bridge Inverter BasicssaranyaОценок пока нет
- Telemetry PDFДокумент11 страницTelemetry PDFJael DungcaОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Two Scoops of Django 3.x by Daniel Audrey Feldroy (251-400)Документ150 страницTwo Scoops of Django 3.x by Daniel Audrey Feldroy (251-400)Prusa SeoОценок пока нет
- RFI BTS SurveyДокумент130 страницRFI BTS SurveyMuzammil WepukuluОценок пока нет
- Sachin S. Pawar: Career ObjectivesДокумент3 страницыSachin S. Pawar: Career ObjectivesSachin PawarОценок пока нет
- Data Security in Cloud ComputingДокумент324 страницыData Security in Cloud Computingprince2venkatОценок пока нет
- Huawei LTE ENodeB CabinetsДокумент41 страницаHuawei LTE ENodeB CabinetsSyed Mohsin Ghani100% (1)
- Setting Up An MVC4 Multi-Tenant Site v1.1Документ61 страницаSetting Up An MVC4 Multi-Tenant Site v1.1Anon Coder100% (1)
- Floor Cleaner - SynopsisДокумент12 страницFloor Cleaner - SynopsisTanvi Khurana0% (2)
- Determine HWM and Reduce It by Shrink SpaceДокумент6 страницDetermine HWM and Reduce It by Shrink SpaceSiva KumarОценок пока нет
- User Manual IDC20KДокумент12 страницUser Manual IDC20KAnonymous m1cSnEavoОценок пока нет
- Operating System VirtualizationДокумент13 страницOperating System VirtualizationSachin JainОценок пока нет
- Primavera P6 Version 20.12 Is Out. Here's What's New 1Документ14 страницPrimavera P6 Version 20.12 Is Out. Here's What's New 1meshmeshОценок пока нет
- Sub QueriesДокумент16 страницSub QueriesakshayОценок пока нет
- CAT S61: The Advanced Tool To Help Get Any Job DoneДокумент2 страницыCAT S61: The Advanced Tool To Help Get Any Job DoneDouglas Gaitan PotosmeОценок пока нет
- Module 1 Web Systems and Technology 2Документ19 страницModule 1 Web Systems and Technology 2Ron Marasigan100% (2)
- Home Visit Record (HVR) #1Документ2 страницыHome Visit Record (HVR) #1Nicole Arriana ResumaОценок пока нет
- 06944eb5513ef244ec882693720db20aДокумент409 страниц06944eb5513ef244ec882693720db20aRatanieri0% (1)
- Puana Cell Phone Search WarrantДокумент24 страницыPuana Cell Phone Search WarrantHNN67% (3)
- Uenr25330001Документ8 страницUenr25330001William carlos Trujillo cruzОценок пока нет
- Slide Sosialisasi PULDATANДокумент52 страницыSlide Sosialisasi PULDATANKJSB LALU UBAI ABDILLAH - PHLN 2022Оценок пока нет
- ADAM-5000 IO Module Manual Ed 2.3Документ88 страницADAM-5000 IO Module Manual Ed 2.3Pham SangОценок пока нет
- Strapack I-10 Instruction-Parts Manual MBДокумент26 страницStrapack I-10 Instruction-Parts Manual MBJesus PempengcoОценок пока нет
- Training Asylum ApplicationДокумент2 страницыTraining Asylum Applicationec_eiucОценок пока нет
- Data Quality DMB Ok Dam A BrasilДокумент46 страницData Quality DMB Ok Dam A BrasilforleviОценок пока нет
- Youth and Social MediaДокумент9 страницYouth and Social MediaShreyas ShahaОценок пока нет
- Adrian - Borbe - CHAPTER 1 5 1Документ149 страницAdrian - Borbe - CHAPTER 1 5 1ecilaborbe2003Оценок пока нет
- Basic Pencil ShadingДокумент2 страницыBasic Pencil ShadingNecronlord2Оценок пока нет
- Principle of LCD DisplayДокумент23 страницыPrinciple of LCD DisplayZulhilmi BalokolosОценок пока нет
- 82-P01.91.300481-01 GS100 Operation ManualДокумент137 страниц82-P01.91.300481-01 GS100 Operation ManualWolaé Mathurin Edmond Amegandjin100% (2)
- Criteria For Classifying Forecasting Me - 2020 - International Journal of Foreca PDFДокумент11 страницCriteria For Classifying Forecasting Me - 2020 - International Journal of Foreca PDFcrackendОценок пока нет
- WhitePaper Rolling Stock-2014Документ18 страницWhitePaper Rolling Stock-2014haftommmmОценок пока нет