Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Rigid Body DynamicsДокумент55 страницRigid Body DynamicsKenn ConsueloОценок пока нет
- SPH4U Dynamics Test 1Документ13 страницSPH4U Dynamics Test 1Shehab MohamedОценок пока нет
- Chap 3 No 1Документ2 страницыChap 3 No 1api-338922585Оценок пока нет
- DGDGДокумент5 страницDGDGjokzkОценок пока нет
- TtimboxcДокумент5 страницTtimboxckaulauОценок пока нет
- DGDGДокумент5 страницDGDGjokzkОценок пока нет
- TtimboxcДокумент13 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент5 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент3 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент5 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент9 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент5 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент4 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент3 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент6 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент4 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент2 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент7 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент14 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент7 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент2 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент8 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент7 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент11 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент5 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент14 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент3 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент4 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент11 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент5 страницTtimboxckaulauОценок пока нет
- TtimboxcДокумент3 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент4 страницыTtimboxckaulauОценок пока нет
- TtimboxcДокумент6 страницTtimboxckaulauОценок пока нет
- Bernoulli's Principle PDFДокумент3 страницыBernoulli's Principle PDFAnonymous EUaRVTHTDОценок пока нет
- Applied Mechanics IIДокумент2 страницыApplied Mechanics IIRavi Sharma BhandariОценок пока нет
- What Are The Types of GYROДокумент3 страницыWhat Are The Types of GYROvinayОценок пока нет
- Rotational Motion Practice Test AnswersДокумент8 страницRotational Motion Practice Test AnswersTajiriMollelОценок пока нет
- PSI AP Physics C - Rotational Dynamics Multiple Choice QuestionsДокумент12 страницPSI AP Physics C - Rotational Dynamics Multiple Choice QuestionswswqjisdkОценок пока нет
- Tutorial - Planar Kinetics of Rigid Body (Force and Acceleration)Документ5 страницTutorial - Planar Kinetics of Rigid Body (Force and Acceleration)Chin Tiong LeeОценок пока нет
- Gyroscopic Analysis in Two WheelersДокумент9 страницGyroscopic Analysis in Two WheelersRaj Kumar100% (1)
- Quiz03 SolДокумент4 страницыQuiz03 SolJackson WangОценок пока нет
- MEC520T Design For Vibration Control. Assignments 1 and 2Документ4 страницыMEC520T Design For Vibration Control. Assignments 1 and 2Kommaraju BhavanaОценок пока нет
- Physics I Problems PDFДокумент1 страницаPhysics I Problems PDFbosschellenОценок пока нет
- Errata Second EditionДокумент2 страницыErrata Second EditionBsbsbaОценок пока нет
- EME 1202 Lecture 1Документ21 страницаEME 1202 Lecture 1MAENYA BRUCE OYONDIОценок пока нет
- MEC 102 PS 1st Term-2011-2012Документ3 страницыMEC 102 PS 1st Term-2011-2012Mond DamascoОценок пока нет
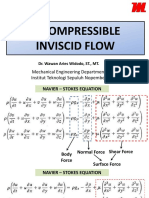
- CHAPTER 6 - Incompressible Inviscid FlowДокумент33 страницыCHAPTER 6 - Incompressible Inviscid FlowRamadhanu SuwondoОценок пока нет
- Rotational Inertia Lab ReportДокумент8 страницRotational Inertia Lab Reportbrian100% (1)
- EERC-82-09 Fluid-Structure Interactions Added Mass Computations For Incompressible FluidДокумент126 страницEERC-82-09 Fluid-Structure Interactions Added Mass Computations For Incompressible FluidBMWrider1453Оценок пока нет
- Mech AДокумент5 страницMech AJanine Jade SetiasОценок пока нет
- Assignment 1: Computational Fluid Dynamic (CFD) Mkaa8Документ8 страницAssignment 1: Computational Fluid Dynamic (CFD) Mkaa8Azhar MarzukiОценок пока нет
- Lec 2 SatelliteДокумент26 страницLec 2 SatelliteManal ShabanОценок пока нет
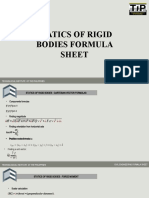
- Statics of Rigid Bodies Formula SheetДокумент20 страницStatics of Rigid Bodies Formula SheetJOHN LESTER FRANCISCOОценок пока нет
- 03 - Load Factor at Maneuvers of The PlaneДокумент8 страниц03 - Load Factor at Maneuvers of The PlaneRocio Del Pilar Bravo SalazarОценок пока нет
- Igcse Sample PaperДокумент8 страницIgcse Sample PaperharshanauocОценок пока нет
- ROTATIONAL EQUILIBRIUM andДокумент27 страницROTATIONAL EQUILIBRIUM andYoutube Google50% (2)
- Semester 1 Assessment 2009 436-431 Mechanics 4 Unit2 DynamicsДокумент4 страницыSemester 1 Assessment 2009 436-431 Mechanics 4 Unit2 DynamicsSon TranОценок пока нет
- Celestial Mechanics Cheat SheetДокумент1 страницаCelestial Mechanics Cheat Sheetgana essamОценок пока нет
- Gravity, Air Resistance, Terminal Velocity, and Projectile MotionДокумент23 страницыGravity, Air Resistance, Terminal Velocity, and Projectile MotionlidahtakbertulangОценок пока нет