Вам также может понравиться
- What's Cooking: Digital Transformation of the Agrifood SystemОт EverandWhat's Cooking: Digital Transformation of the Agrifood SystemОценок пока нет
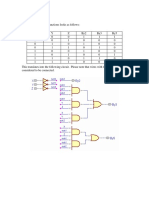
- Simplification of Boolean FunctionsДокумент34 страницыSimplification of Boolean Functionsdigitales100% (7)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99От EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Оценок пока нет
- Oscillations and Waves: SHOДокумент10 страницOscillations and Waves: SHOMahendra PanwarОценок пока нет
- Tables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesОт EverandTables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesОценок пока нет
- Computer FundamentalsДокумент4 страницыComputer FundamentalsDia Necson Nicole SapongОценок пока нет
- COMP3721 Question Bank 2 Suggested Solution Pumping Theorem For Regular LanguagesДокумент10 страницCOMP3721 Question Bank 2 Suggested Solution Pumping Theorem For Regular LanguageskjhdskjhfkjfhОценок пока нет
- Boolean Logic and Gates LabДокумент2 страницыBoolean Logic and Gates LabKwon JiralllОценок пока нет
- Introduction To The Principles of Virtual Work: F F F F X yДокумент7 страницIntroduction To The Principles of Virtual Work: F F F F X yBarry LibertyОценок пока нет
- Computer Architecture 1Документ9 страницComputer Architecture 1Belén HidalgoОценок пока нет
- INPhO 2008 - 2020 Indian National Physics OlympiadДокумент362 страницыINPhO 2008 - 2020 Indian National Physics OlympiadSubhankar TripathiОценок пока нет
- Solving Linear Differential Equations Forced by Impulse FunctionsДокумент7 страницSolving Linear Differential Equations Forced by Impulse FunctionsBT21EE017 Gulshan RajОценок пока нет
- Block CodeДокумент36 страницBlock CodetakahashikeyakiОценок пока нет
- CS229 Lecture notes on PCAДокумент6 страницCS229 Lecture notes on PCAAlpha WolfОценок пока нет
- Large Angle Rutherford Scattering of α-Particles from Gold FoilДокумент12 страницLarge Angle Rutherford Scattering of α-Particles from Gold Foilharoon khanОценок пока нет
- 14:332:231 Digital Logic Design: Ivan Marsic, Rutgers University Electrical & Computer Engineering Fall 2013Документ7 страниц14:332:231 Digital Logic Design: Ivan Marsic, Rutgers University Electrical & Computer Engineering Fall 2013Woya MaОценок пока нет
- Multiplexers: LAB No. 6Документ5 страницMultiplexers: LAB No. 6Cristina GrohОценок пока нет
- Module 7: Coupled Oscillators Lecture 7: Coupled OscillatorsДокумент8 страницModule 7: Coupled Oscillators Lecture 7: Coupled OscillatorsDr Srini vasanОценок пока нет
- Lecture 8 Hamming CodeДокумент5 страницLecture 8 Hamming Coden4vrxcryОценок пока нет
- Solutions Ch2Документ23 страницыSolutions Ch2shashitjОценок пока нет
- Chapter 02 SolutionsДокумент75 страницChapter 02 SolutionsDiane ParkОценок пока нет
- Propositional Logic & HardwareДокумент5 страницPropositional Logic & HardwareDebosmeet ChakrabortyОценок пока нет
- Digital Logic Design - RevisionДокумент676 страницDigital Logic Design - RevisionGanesh ThapaОценок пока нет
- 3. Sequential Logic Circuit_Part2Документ19 страниц3. Sequential Logic Circuit_Part2ali vaisiОценок пока нет
- TP Logic FunctionДокумент4 страницыTP Logic FunctionMakrem MrabetОценок пока нет
- Chapter 5 Controllability and ObservabilityДокумент65 страницChapter 5 Controllability and Observabilitykajela25Оценок пока нет
- MATH3067 (Coding Theory) 2012: R3 R3-R1 R3 R3-R2Документ3 страницыMATH3067 (Coding Theory) 2012: R3 R3-R1 R3 R3-R2Sara OmranОценок пока нет
- (Two-Level) Logic Synthesis: Quine/Mccluskey AlgorithmДокумент36 страниц(Two-Level) Logic Synthesis: Quine/Mccluskey AlgorithmGhena TofanОценок пока нет
- Logic Circuits: 1. Logon To The Logic Gate Simulator WebsiteДокумент7 страницLogic Circuits: 1. Logon To The Logic Gate Simulator Websiteapi-417400228Оценок пока нет
- Zivot Je SanДокумент2 страницыZivot Je Sannfbs8vx4zkОценок пока нет
- PQI 5780 - Chemical Processes Control I: T T T T T T TДокумент102 страницыPQI 5780 - Chemical Processes Control I: T T T T T T Twa_moreiraОценок пока нет
- Delta Function and So OnДокумент20 страницDelta Function and So OnLionel TopperОценок пока нет
- Complete Solutions to Exercises 5.5 Matrix TransformationsДокумент17 страницComplete Solutions to Exercises 5.5 Matrix TransformationsDebdutta ChatterjeeОценок пока нет
- Tutorial Work 25 Deduce Stability of Equilibrium Solutions Using Taylor Series ExpansionsДокумент1 страницаTutorial Work 25 Deduce Stability of Equilibrium Solutions Using Taylor Series ExpansionsmattОценок пока нет
- Euler's Method: Building The Function From The DerivativeДокумент6 страницEuler's Method: Building The Function From The DerivativeRamir Dann MalemitОценок пока нет
- Algebra BooleДокумент6 страницAlgebra Boolecarlos eliezer ramirezОценок пока нет
- Introduction To Digital Communications 1st Edition Grami Solutions ManualДокумент15 страницIntroduction To Digital Communications 1st Edition Grami Solutions ManualhypatiadaisypkmОценок пока нет
- Question B1 A) Solution,: Name: - Suraj Chaudhary - TP Number: - NP000619Документ7 страницQuestion B1 A) Solution,: Name: - Suraj Chaudhary - TP Number: - NP000619Suzan DahitОценок пока нет
- Jouve Lecture1 2 PDFДокумент61 страницаJouve Lecture1 2 PDFNirmalya MishraОценок пока нет
- A Fast Algorithm For Generating Nonisomorphic Chord DiagramsДокумент16 страницA Fast Algorithm For Generating Nonisomorphic Chord DiagramsHa NguyenОценок пока нет
- Lec 23-24 Euler MethodДокумент36 страницLec 23-24 Euler MethodEngineer Inside33% (3)
- PCE6101 Linear Systems Theory: (Controllability and Observability)Документ33 страницыPCE6101 Linear Systems Theory: (Controllability and Observability)Birhex FeyeОценок пока нет
- CastiglianoДокумент3 страницыCastiglianoSung Kyoon ParkОценок пока нет
- Trends and DF Tests: Trend Stationary (TS) Series (Figs. 1 & 2)Документ14 страницTrends and DF Tests: Trend Stationary (TS) Series (Figs. 1 & 2)Natiq QadjievОценок пока нет
- Inno2018 Emt2502 Vibrations Free Vibration SdofДокумент15 страницInno2018 Emt2502 Vibrations Free Vibration SdofinnoodiraОценок пока нет
- EE263 Homework SolutionsДокумент15 страницEE263 Homework SolutionsMouli RoyОценок пока нет
- Lyapunov PDFДокумент11 страницLyapunov PDF정문열Оценок пока нет
- Assgn2 Soln PDFДокумент2 страницыAssgn2 Soln PDFtoxiccyber471Оценок пока нет
- InClassActivity01 SolДокумент3 страницыInClassActivity01 SolDonovan DibsОценок пока нет
- 1 Boolen Algebra 1Документ11 страниц1 Boolen Algebra 1Brahim KaddafiОценок пока нет
- 4C7 - Digital Communications - Tutorial 1 SolutionsДокумент4 страницы4C7 - Digital Communications - Tutorial 1 SolutionsDanny AdonisОценок пока нет
- Robotics Assignment TwoДокумент19 страницRobotics Assignment Twomisgana etichaОценок пока нет
- AND X y X.Y NOT X X Numbering 0 0 0 0 1 0 1 0 1 0 X 1 0 0 0 1 1 1 If (X 4) Then 1 OR X y X + y 0 0 0 Xy 0 1 1 1 0 1 1 1 1 0 1 0 1Документ3 страницыAND X y X.Y NOT X X Numbering 0 0 0 0 1 0 1 0 1 0 X 1 0 0 0 1 1 1 If (X 4) Then 1 OR X y X + y 0 0 0 Xy 0 1 1 1 0 1 1 1 1 0 1 0 1Reah GumbsОценок пока нет
- Itc 1Документ6 страницItc 1Ayush KumarОценок пока нет
- Chapter 11 Binary NumbersДокумент47 страницChapter 11 Binary NumbersUmarОценок пока нет
- 2 Updated 1referral 2Документ4 страницы2 Updated 1referral 2Abderahmane BenaliОценок пока нет
- Combinational Logic ExercisesДокумент13 страницCombinational Logic ExercisesTạ Minh ĐứcОценок пока нет
- Complete The Following Timing Diagram For A Two-Input XOR GateДокумент5 страницComplete The Following Timing Diagram For A Two-Input XOR Gatesebastian lopezОценок пока нет
- EE302 Problem Set III Step Response Analysis and System ModelingДокумент6 страницEE302 Problem Set III Step Response Analysis and System ModelingVASANTHKUMAR M SОценок пока нет
- DLD Lab 3Документ4 страницыDLD Lab 3sanya.rizwan0912Оценок пока нет
- Exercise 5Документ7 страницExercise 5venkat venkiОценок пока нет
- Effects of Stiffness Irregularity on Seismic Response of Structures Considering SSIДокумент2 страницыEffects of Stiffness Irregularity on Seismic Response of Structures Considering SSIvenkat venkiОценок пока нет
- Indian Institute of Space Science and Technology Department of Earth and Space SciencesДокумент19 страницIndian Institute of Space Science and Technology Department of Earth and Space SciencesDeepak SreenivasanОценок пока нет
- CLE 5012 - Design of Bridges Digital Assignment - 1Документ1 страницаCLE 5012 - Design of Bridges Digital Assignment - 1venkat venkiОценок пока нет
- SdofДокумент160 страницSdofddanielwork2060Оценок пока нет
- APEAMCET-2017 Agriculture & Medical Stream Preliminary Key: Date: 28-04-17 FN (Shift 1)Документ1 страницаAPEAMCET-2017 Agriculture & Medical Stream Preliminary Key: Date: 28-04-17 FN (Shift 1)venkat venkiОценок пока нет
- Nanoscience and Nanotechnology BreakthroughsДокумент22 страницыNanoscience and Nanotechnology BreakthroughsNawras aliОценок пока нет
- LEP 2.2.01 Interference of Light: Related Topics Set-Up and ProcedureДокумент3 страницыLEP 2.2.01 Interference of Light: Related Topics Set-Up and ProcedureMuhammad AhmadОценок пока нет
- Bending of open and closed thin-walled beamsДокумент35 страницBending of open and closed thin-walled beamsRamu Neel Nishanth DevaraОценок пока нет
- Topic: Visual::Worksheet Number:154Документ7 страницTopic: Visual::Worksheet Number:154kunjal_radiaОценок пока нет
- SVM7600 series-AG - 08SK2.006.00936 PDFДокумент95 страницSVM7600 series-AG - 08SK2.006.00936 PDFThái ĐàoОценок пока нет
- QX - 100 P 000021 e 05Документ32 страницыQX - 100 P 000021 e 05Eng-Mohammed SalemОценок пока нет
- 2324 Grade 8 (UAE-GULF) Science Course Revision QuestionsДокумент40 страниц2324 Grade 8 (UAE-GULF) Science Course Revision Questionswritetome.amjadОценок пока нет
- Settlement of Piled Foundations Using Equivalent Raft ApproachДокумент17 страницSettlement of Piled Foundations Using Equivalent Raft ApproachSebastian DraghiciОценок пока нет
- B Tech Mech Mech Sandwich Final Year 2023 24 ModifiedДокумент30 страницB Tech Mech Mech Sandwich Final Year 2023 24 ModifiedShrimant H. NikamОценок пока нет
- Chapter Questions OscillationsДокумент8 страницChapter Questions OscillationsJunLi CaiОценок пока нет
- Prealgebra 5th Edition Lial Hestwood Test BankДокумент21 страницаPrealgebra 5th Edition Lial Hestwood Test Bankmatthew100% (16)
- Types of Sensor and Their ApplicationДокумент6 страницTypes of Sensor and Their Applicationpogisimpatiko0% (1)
- IN-4000 SET: Operating ManualДокумент20 страницIN-4000 SET: Operating ManualGopal HegdeОценок пока нет
- Lighitng LebanonДокумент138 страницLighitng Lebanonmohammad kassarОценок пока нет
- ShteДокумент57 страницShteKaiash M YОценок пока нет
- 1.6 Combinations of Transformations HardДокумент8 страниц1.6 Combinations of Transformations HardAkshathSai MankalaОценок пока нет
- Mechanical Engineering Design Elective Module on Industrial TribologyДокумент8 страницMechanical Engineering Design Elective Module on Industrial TribologyNarayan ManeОценок пока нет
- Adjusting and Maintaining DC GeneratorsДокумент10 страницAdjusting and Maintaining DC GeneratorssandyОценок пока нет
- Properties of SteelДокумент61 страницаProperties of SteelCharizza Montarin CEОценок пока нет
- Math ProblemsДокумент6 страницMath ProblemsEurydiceОценок пока нет
- Atomic Orbitals: Skills To DevelopДокумент19 страницAtomic Orbitals: Skills To Developمحمود محمدОценок пока нет
- TDM 1.2 100 300 W1 Ac Servocontroller Indramat ManualДокумент38 страницTDM 1.2 100 300 W1 Ac Servocontroller Indramat ManualDaniel Dobaño Fernandez100% (3)
- LM140/LM340A/LM340/LM7800C Series 3-Terminal Positive RegulatorsДокумент15 страницLM140/LM340A/LM340/LM7800C Series 3-Terminal Positive Regulatorsvmm mОценок пока нет
- Thesis Project-Parametric - Study - of - Gravitational - Water - Vortex - Micro - Hydro - PowerДокумент151 страницаThesis Project-Parametric - Study - of - Gravitational - Water - Vortex - Micro - Hydro - PowerbrookОценок пока нет
- ExtrusionДокумент14 страницExtrusionOmar AbdullahОценок пока нет
- .0106 Mm/s 0.075 Mm/s .106 Cm/s 0.750 Cm/s .106 Mm/s 0.750 Mm/s .0106 Mm/s 0.075 Cm/sДокумент2 страницы.0106 Mm/s 0.075 Mm/s .106 Cm/s 0.750 Cm/s .106 Mm/s 0.750 Mm/s .0106 Mm/s 0.075 Cm/sReech Aerol AlmendralОценок пока нет
- Bedside Monitor: Service ManualДокумент152 страницыBedside Monitor: Service Manualkatabalwa eric100% (1)
- XR3C 6 Element Triband Yagi 20-15-10MДокумент18 страницXR3C 6 Element Triband Yagi 20-15-10Msboonuy331Оценок пока нет
- 2023-4-10 G11 - Midterm (1-5) - Answer KeyДокумент25 страниц2023-4-10 G11 - Midterm (1-5) - Answer Keysaba falahОценок пока нет
- Comparative Study of Existing and Revised Codal Provisions Adopted in Nepal For Analysis and Design of Reinforced Concrete StructureДокумент19 страницComparative Study of Existing and Revised Codal Provisions Adopted in Nepal For Analysis and Design of Reinforced Concrete StructureRojina AdhikariОценок пока нет
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsОт EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsОценок пока нет
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldОт EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldРейтинг: 3 из 5 звезд3/5 (79)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormОт EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormРейтинг: 5 из 5 звезд5/5 (5)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)От EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Оценок пока нет
- Guidelines for Implementing Process Safety ManagementОт EverandGuidelines for Implementing Process Safety ManagementОценок пока нет
- A Poison Like No Other: How Microplastics Corrupted Our Planet and Our BodiesОт EverandA Poison Like No Other: How Microplastics Corrupted Our Planet and Our BodiesРейтинг: 5 из 5 звезд5/5 (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsОт EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsРейтинг: 5 из 5 звезд5/5 (2)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingОт EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeОт EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeРейтинг: 4 из 5 звезд4/5 (2)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusОт EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenОт EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenОценок пока нет
- Psychology Behind Mathematics - The Comprehensive GuideОт EverandPsychology Behind Mathematics - The Comprehensive GuideОценок пока нет
- Chemical Process Safety: Learning from Case HistoriesОт EverandChemical Process Safety: Learning from Case HistoriesРейтинг: 4 из 5 звезд4/5 (14)
- Incidents That Define Process SafetyОт EverandIncidents That Define Process SafetyОценок пока нет
- Safety Fundamentals and Best Practices in Construction IndustryОт EverandSafety Fundamentals and Best Practices in Construction IndustryОценок пока нет
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathОт EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathРейтинг: 5 из 5 звезд5/5 (1)
- Inherently Safer Chemical Processes: A Life Cycle ApproachОт EverandInherently Safer Chemical Processes: A Life Cycle ApproachРейтинг: 5 из 5 звезд5/5 (1)
- Rules of Thumb for Maintenance and Reliability EngineersОт EverandRules of Thumb for Maintenance and Reliability EngineersРейтинг: 4.5 из 5 звезд4.5/5 (12)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsОт EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsРейтинг: 3.5 из 5 звезд3.5/5 (9)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceОт EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceОценок пока нет
- Mental Math Secrets - How To Be a Human CalculatorОт EverandMental Math Secrets - How To Be a Human CalculatorРейтинг: 5 из 5 звезд5/5 (3)
- Math Magic: How To Master Everyday Math ProblemsОт EverandMath Magic: How To Master Everyday Math ProblemsРейтинг: 3.5 из 5 звезд3.5/5 (15)