Вам также может понравиться
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Документ1 страницаBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Mahrez ZaafouriОценок пока нет
- Sans Titre7Документ1 страницаSans Titre7Mahrez ZaafouriОценок пока нет
- A-Saisir Le Besoin: S. Qualité EnquêteДокумент1 страницаA-Saisir Le Besoin: S. Qualité EnquêteMahrez ZaafouriОценок пока нет
- Moteur GX 31: Solid EdgeДокумент1 страницаMoteur GX 31: Solid EdgeMahrez ZaafouriОценок пока нет
- D-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionДокумент1 страницаD-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionMahrez ZaafouriОценок пока нет
- 12Документ1 страница12Mahrez ZaafouriОценок пока нет
- Document Constructeur Choix RéducteurДокумент1 страницаDocument Constructeur Choix RéducteurMahrez ZaafouriОценок пока нет
- 3-Recherche Des Solutions Pour Chaque FonctionДокумент1 страница3-Recherche Des Solutions Pour Chaque FonctionMahrez ZaafouriОценок пока нет
- Présentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesДокумент1 страницаPrésentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesMahrez ZaafouriОценок пока нет
- Liaisons Equivalentes-5Документ5 страницLiaisons Equivalentes-5Mahrez ZaafouriОценок пока нет
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Документ1 страницаBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Mahrez ZaafouriОценок пока нет
- Extrait Du Guide Du Dessinateur IndustrielДокумент1 страницаExtrait Du Guide Du Dessinateur IndustrielMahrez ZaafouriОценок пока нет
- Page 5Документ1 страницаPage 5Mahrez ZaafouriОценок пока нет
- Page 4Документ1 страницаPage 4Mahrez ZaafouriОценок пока нет
- Page 2Документ1 страницаPage 2Mahrez ZaafouriОценок пока нет
- Page 3Документ1 страницаPage 3Mahrez ZaafouriОценок пока нет
- Page 1Документ1 страницаPage 1Mahrez ZaafouriОценок пока нет
- 1Документ1 страница1Mahrez ZaafouriОценок пока нет
- Liaisons Equivalente-4sДокумент3 страницыLiaisons Equivalente-4sMahrez ZaafouriОценок пока нет
- Liaisons Equivalentes-1Документ3 страницыLiaisons Equivalentes-1Mahrez ZaafouriОценок пока нет
- Liaisons Equivalentes-2Документ5 страницLiaisons Equivalentes-2Mahrez ZaafouriОценок пока нет
- Liaisons Equivalentes-3Документ3 страницыLiaisons Equivalentes-3Mahrez ZaafouriОценок пока нет
- 3Документ1 страница3Mahrez ZaafouriОценок пока нет
- Contrôle de La Clavette Parallèle: RemarqueДокумент1 страницаContrôle de La Clavette Parallèle: RemarqueMahrez ZaafouriОценок пока нет
- 2Документ1 страница2Mahrez ZaafouriОценок пока нет
- I-Question 1: Iset SBZ CswaДокумент1 страницаI-Question 1: Iset SBZ CswaMahrez ZaafouriОценок пока нет
- 4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLДокумент1 страница4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLMahrez ZaafouriОценок пока нет
- Iset SBZ CswaДокумент1 страницаIset SBZ CswaMahrez ZaafouriОценок пока нет
- Contenu de La Formation CSWAДокумент1 страницаContenu de La Formation CSWAMahrez ZaafouriОценок пока нет
- I-Question 1: Iset SBZ CswaДокумент1 страницаI-Question 1: Iset SBZ CswaMahrez ZaafouriОценок пока нет
- NSN Active Alarm WB@20170608 070002Документ2 647 страницNSN Active Alarm WB@20170608 070002Manas Kumar MohapatraОценок пока нет
- Présentation - Dimmensionnement - Formation 2016 - 2017 - VFДокумент96 страницPrésentation - Dimmensionnement - Formation 2016 - 2017 - VFstar d'or100% (1)
- IEC 62271-200-2011 Cor1-2015 PDFДокумент1 страницаIEC 62271-200-2011 Cor1-2015 PDFBilal JavaidОценок пока нет
- Exo SinusoidalДокумент2 страницыExo SinusoidalDorian GreyОценок пока нет
- Manuel Utilisation Variateur OMRON J7Документ176 страницManuel Utilisation Variateur OMRON J7ouael100% (1)
- 522 Les Lois de DegradationsДокумент10 страниц522 Les Lois de DegradationseslochОценок пока нет
- Circuits Numeriques Et Synthese Logique, Un Outil - VHDLДокумент178 страницCircuits Numeriques Et Synthese Logique, Un Outil - VHDLMahmoud DoughanОценок пока нет
- DémarreurДокумент41 страницаDémarreurBERTHIERОценок пока нет
- Pi KrankomponentenДокумент148 страницPi KrankomponentenBülent KabadayiОценок пока нет
- Heliodent DS WireingДокумент8 страницHeliodent DS WireinglorisaszigiОценок пока нет
- Chapitre 3 Les Oscillateurs SinusoidauxДокумент21 страницаChapitre 3 Les Oscillateurs SinusoidauxPerla del DesiertoОценок пока нет
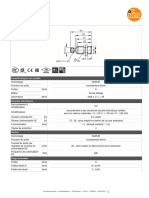
- Détecteur Inductif NAMUR: Caractéristiques Du ProduitДокумент3 страницыDétecteur Inductif NAMUR: Caractéristiques Du ProduitPhilippe jean-louisОценок пока нет
- ChapB15 Théorème de ShannonДокумент2 страницыChapB15 Théorème de ShannonvarniceОценок пока нет
- 63le Disjoncteur DifferentielДокумент1 страница63le Disjoncteur DifferentielAhmed ZaouitОценок пока нет
- A.L.I BacДокумент7 страницA.L.I BacArfaoui AymenОценок пока нет
- 2.2.1 VD4 DSДокумент2 страницы2.2.1 VD4 DSpitillinОценок пока нет
- Faculté Des Sciences de Tunis: Conception Des Circuits Intégrés Numériques en Technologie CMOSДокумент90 страницFaculté Des Sciences de Tunis: Conception Des Circuits Intégrés Numériques en Technologie CMOSlinkskilОценок пока нет
- Handout EAGE 02Документ6 страницHandout EAGE 02sekОценок пока нет
- HDR EgДокумент192 страницыHDR EgibrahimОценок пока нет
- Catalogue Binder Freins - Embrayages 0507Документ13 страницCatalogue Binder Freins - Embrayages 0507Claudine Elisseev100% (2)
- Commande Onduleur FpgaДокумент50 страницCommande Onduleur FpgaArbaoui Mohamed100% (1)
- Assemblage Des Céramiques - 100406Документ56 страницAssemblage Des Céramiques - 100406Boubou FouadОценок пока нет
- Compte Rendu TP N°1Документ6 страницCompte Rendu TP N°1Thibaud BouzyОценок пока нет
- Cablage ACДокумент11 страницCablage ACPanneau solaireОценок пока нет
- Lois Des Circuits ExercicesДокумент6 страницLois Des Circuits Exercicesfares noureddine0% (1)
- KIT BX-78 230V 001U2643 CAME NoticeДокумент24 страницыKIT BX-78 230V 001U2643 CAME NoticePascal LandsheereОценок пока нет
- Tp-Addittionneur Soustracteur-Elctronique NumeriqueДокумент18 страницTp-Addittionneur Soustracteur-Elctronique Numeriqueelidrissi.a143Оценок пока нет
- Electronique - Examen 2022 - 2023 - Rattrapage - CorrectionДокумент5 страницElectronique - Examen 2022 - 2023 - Rattrapage - Correctionghouileya767Оценок пока нет
- TP-01-Mesure-Monopha 2L GE 2023 2024Документ7 страницTP-01-Mesure-Monopha 2L GE 2023 2024Ishaq AmraniОценок пока нет
- Manuel de Réparation Nettoyeur HP ALTO PDFДокумент24 страницыManuel de Réparation Nettoyeur HP ALTO PDFLorenzi0% (1)