Вам также может понравиться
- Industrial Control: Behzad SamadiДокумент57 страницIndustrial Control: Behzad Samadiluispereira89Оценок пока нет
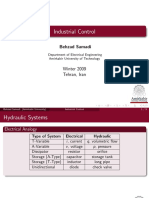
- Industrial Control Systems - 04 HydraulicsДокумент18 страницIndustrial Control Systems - 04 HydraulicsBehzad SamadiОценок пока нет
- CH 3.1. Gas Power Cycle (Otto & Diesel)Документ27 страницCH 3.1. Gas Power Cycle (Otto & Diesel)eyobОценок пока нет
- David, Theory of Ideal Orifice Pulse Tube RefrigeratorДокумент8 страницDavid, Theory of Ideal Orifice Pulse Tube Refrigeratormarco ricciОценок пока нет
- Lecture10 11 PneumaticsДокумент32 страницыLecture10 11 PneumaticsSergio Fernández Blanco100% (1)
- Aerodynamic Limits of Gas Turbine Compressor During High Air Offtakes For Minimum Load ExtensionДокумент14 страницAerodynamic Limits of Gas Turbine Compressor During High Air Offtakes For Minimum Load ExtensionPooya ShayestehОценок пока нет
- SCHX1014 - Chemical Engineering Thermodynamics - Unit 4: Reference PropertiesДокумент29 страницSCHX1014 - Chemical Engineering Thermodynamics - Unit 4: Reference PropertiesShanmuga PriyaОценок пока нет
- Theoretical and Experimental Study of Centrifugal Compressor Impellers Elnashar, H Amr, Eldalil, M Khaled, Hashim, A., Ali, Abdelrahman, M MohamedДокумент11 страницTheoretical and Experimental Study of Centrifugal Compressor Impellers Elnashar, H Amr, Eldalil, M Khaled, Hashim, A., Ali, Abdelrahman, M MohamedMuhammad RajaОценок пока нет
- 2 AerodynamicДокумент1 страница2 AerodynamicPooya ShayestehОценок пока нет
- You Are Required To Write A Lab Report Based On The Lab DemonstrationДокумент3 страницыYou Are Required To Write A Lab Report Based On The Lab DemonstrationmajuneeОценок пока нет
- Plantas de RefrigeraçãoДокумент17 страницPlantas de RefrigeraçãoBeatriz ReyesОценок пока нет
- PVDH GDH: Chapter SeventeenДокумент1 страницаPVDH GDH: Chapter SeventeenEaswaran NampoothiriОценок пока нет
- Performance Investigation of A Solar Thermal Collector Provided With Air Jets Impingement On Multi V-Shaped Protrusion Ribs Absorber PlateДокумент18 страницPerformance Investigation of A Solar Thermal Collector Provided With Air Jets Impingement On Multi V-Shaped Protrusion Ribs Absorber PlateChauhan RanchanОценок пока нет
- Lecture 6Документ18 страницLecture 6Tural EmirliОценок пока нет
- Basic Meteorological ProcessesДокумент55 страницBasic Meteorological ProcessesAshraf RefaatОценок пока нет
- CAGI ElectHB ch8Документ112 страницCAGI ElectHB ch8rcangeliОценок пока нет
- FlowLabEOC2e CH07Документ3 страницыFlowLabEOC2e CH07tomekzawistowskiОценок пока нет
- Cavitation CFD in A Centrifugal PumpДокумент7 страницCavitation CFD in A Centrifugal Pumpazispn99100% (1)
- Non Dimensional NumbersДокумент16 страницNon Dimensional NumbersSharath ChandraОценок пока нет
- A Mathematical Model For Computing The Effects of Air Humidity, Fuel Composition and Gas Dissociation On Gas Turbine Performance and Its Actual ApplicationДокумент7 страницA Mathematical Model For Computing The Effects of Air Humidity, Fuel Composition and Gas Dissociation On Gas Turbine Performance and Its Actual ApplicationJeeEianYannОценок пока нет
- Ramjet Engine Test Rig: Propulsion Engineering LaboratoryДокумент7 страницRamjet Engine Test Rig: Propulsion Engineering Laboratoryaman guptaОценок пока нет
- Spina 2002Документ10 страницSpina 2002hasantapОценок пока нет
- BF 00411718Документ30 страницBF 00411718st.shenppОценок пока нет
- Ventilation2 HPVДокумент5 страницVentilation2 HPVHua Hidari YangОценок пока нет
- Author's PersonalДокумент13 страницAuthor's PersonalEsiОценок пока нет
- Chilton & Colburn 1934 PDFДокумент5 страницChilton & Colburn 1934 PDFrosendo rojas barraganОценок пока нет
- Tsep Elsevier2020Документ40 страницTsep Elsevier2020GauravОценок пока нет
- Solution Manual Heat and Mass Transfer A Practical Approach 2nd Edition Cengel CHДокумент62 страницыSolution Manual Heat and Mass Transfer A Practical Approach 2nd Edition Cengel CHJohn A. CenizaОценок пока нет
- Pin Fin ApparatusДокумент10 страницPin Fin ApparatusHetОценок пока нет
- 2018 - Hybrid CFD ModelДокумент29 страниц2018 - Hybrid CFD ModelSateesh kumar SОценок пока нет
- Modeling of An Automotive Exhaust Thermoelectric Generator: This Is A Dummy TextДокумент163 страницыModeling of An Automotive Exhaust Thermoelectric Generator: This Is A Dummy TextMohanrajRajangamОценок пока нет
- 17 Refrigeration DoneДокумент11 страниц17 Refrigeration DoneThatego Edwin RaseatlholoОценок пока нет
- F Luid Mec Hanic S: Week 3: Fluid Statics: Pressu ReДокумент36 страницF Luid Mec Hanic S: Week 3: Fluid Statics: Pressu ReAhmad RazaОценок пока нет
- AD Lab ManualДокумент33 страницыAD Lab ManualBasith AbbasОценок пока нет
- Viscoelastic Bulk ModuliДокумент19 страницViscoelastic Bulk ModulikevinlimyuanlinОценок пока нет
- 2 Nozzle Pressure DistributionДокумент5 страниц2 Nozzle Pressure DistributionRuqiyya IsrafilovaОценок пока нет
- AC Coaches - ConventionalДокумент85 страницAC Coaches - ConventionalDee TrdОценок пока нет
- Energy Saving Potential of Thermoelectric Radiant Cooling Panels With A Dedicated Outdoor AirДокумент41 страницаEnergy Saving Potential of Thermoelectric Radiant Cooling Panels With A Dedicated Outdoor AirFernando Manuel Gómez CastroОценок пока нет
- 124 Energy Systems: 4.1.1 Thermodynamics of CompressionДокумент4 страницы124 Energy Systems: 4.1.1 Thermodynamics of CompressionFarshkОценок пока нет
- Sugavanam 1995Документ16 страницSugavanam 1995zermiОценок пока нет
- art3A10.10072Fs13202 015 0209 3Документ13 страницart3A10.10072Fs13202 015 0209 3samir harounОценок пока нет
- Thermodynamics of Energy Systems and Processes A RДокумент14 страницThermodynamics of Energy Systems and Processes A RGood HumanОценок пока нет
- Measurement: Section 3Документ31 страницаMeasurement: Section 3sebas guzОценок пока нет
- Basic Practices in Compressors Selection-Purdue UniversityДокумент11 страницBasic Practices in Compressors Selection-Purdue UniversityLuis Joel Ramos RamosОценок пока нет
- Thermal Gradients in Discontinuously Rotated Rotary Regenerative Heat ExchangersДокумент8 страницThermal Gradients in Discontinuously Rotated Rotary Regenerative Heat ExchangersMatheus M. DwinantoОценок пока нет
- Multidisciplinary Optimization of Propeller Blades Focus On The Aeoracoustic Results - Marinus 2011Документ20 страницMultidisciplinary Optimization of Propeller Blades Focus On The Aeoracoustic Results - Marinus 2011Wouterr GОценок пока нет
- Spe 115 G PDFДокумент14 страницSpe 115 G PDFJuan SantosОценок пока нет
- Basic Meteorological Processes P3Документ60 страницBasic Meteorological Processes P3Andini RamadinaОценок пока нет
- 10 5923 J Aerospace 20170501 01Документ8 страниц10 5923 J Aerospace 20170501 01Şevki SağlamОценок пока нет
- BusAmpacityIEEETransOct94 PDFДокумент9 страницBusAmpacityIEEETransOct94 PDFAnonymous qDCftTW5MОценок пока нет
- Optimization of Refrigeration Machinery : Giiran WallДокумент5 страницOptimization of Refrigeration Machinery : Giiran Wallคงเดช คํานึกОценок пока нет
- Hydraulic (Fluid) Systems Hydraulic (Fluid) Systems: - Fundamental PrinciplesДокумент8 страницHydraulic (Fluid) Systems Hydraulic (Fluid) Systems: - Fundamental PrinciplesjoelduparОценок пока нет
- CH 8 PDFДокумент61 страницаCH 8 PDFGaurav Kumar100% (1)
- Keith Sherwin, Michael Horsley (Auth.) - Thermofluids - Tutor's Manual-Springer US (1996)Документ116 страницKeith Sherwin, Michael Horsley (Auth.) - Thermofluids - Tutor's Manual-Springer US (1996)Atg998Оценок пока нет
- Capheat - An Homogeneous Model To Simulate Refrigerant Flow ThrougДокумент7 страницCapheat - An Homogeneous Model To Simulate Refrigerant Flow ThrougMonowarul IslamОценок пока нет
- L7-Properties of Dry GasesДокумент35 страницL7-Properties of Dry GasesRakesh SinghОценок пока нет
- 02 Thermodynamic AirДокумент24 страницы02 Thermodynamic AirzhangyuluОценок пока нет
- DesignofheatexchangersSummary PDFДокумент148 страницDesignofheatexchangersSummary PDFSayyadh Rahamath BabaОценок пока нет
- Nonlinear Model Predictive Control For Autonomous Race CarsДокумент29 страницNonlinear Model Predictive Control For Autonomous Race CarsBehzad SamadiОценок пока нет
- Real-Time Estimation of Vehicle State and Tire-Road Friction ForcesДокумент7 страницReal-Time Estimation of Vehicle State and Tire-Road Friction ForcesBehzad SamadiОценок пока нет
- Convex Optimization and ApplicationsДокумент3 страницыConvex Optimization and ApplicationsBehzad SamadiОценок пока нет
- Model Based Code Generation For Nonlinear Model Predictive ControlДокумент34 страницыModel Based Code Generation For Nonlinear Model Predictive ControlBehzad SamadiОценок пока нет
- Linear Control Systems CourseДокумент2 страницыLinear Control Systems CourseBehzad SamadiОценок пока нет
- Lead Lag Controller DesignДокумент10 страницLead Lag Controller DesignBehzad SamadiОценок пока нет
- 10SSДокумент111 страниц10SSRaju SkОценок пока нет
- Industrial Control Systems - 01 IntroductionДокумент5 страницIndustrial Control Systems - 01 IntroductionBehzad SamadiОценок пока нет
- Industrial Control Systems - 05 AutomotiveДокумент87 страницIndustrial Control Systems - 05 AutomotiveBehzad SamadiОценок пока нет
- PLC 130701140253 Phpapp01Документ179 страницPLC 130701140253 Phpapp01luispereira89Оценок пока нет
- Industrial Control Systems - 09 PIDДокумент242 страницыIndustrial Control Systems - 09 PIDBehzad SamadiОценок пока нет
- Industrial Control Systems - 08 Chemical SystemsДокумент18 страницIndustrial Control Systems - 08 Chemical SystemsBehzad SamadiОценок пока нет
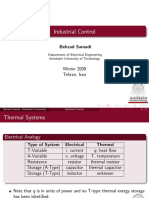
- Industrial Control Systems - 07 Thermal SystemsДокумент11 страницIndustrial Control Systems - 07 Thermal SystemsBehzad SamadiОценок пока нет
- Industrial Control Systems - 06 Liquid LevelДокумент10 страницIndustrial Control Systems - 06 Liquid LevelBehzad SamadiОценок пока нет
- 02modeling 130701130803 Phpapp01Документ6 страниц02modeling 130701130803 Phpapp01luispereira89Оценок пока нет
- Matlab TutorialДокумент47 страницMatlab TutorialBehzad SamadiОценок пока нет
- The Tragedy of 1953Документ5 страницThe Tragedy of 1953Behzad SamadiОценок пока нет
- Anullment Decision Ma. Crisel Joseph RoyceДокумент3 страницыAnullment Decision Ma. Crisel Joseph RoyceJanet Tinio VelardeОценок пока нет
- Consolidated Plywood 149 Scra 448Документ14 страницConsolidated Plywood 149 Scra 448Mp CasОценок пока нет
- Sales Midterm NotesДокумент27 страницSales Midterm Notesione salveronОценок пока нет
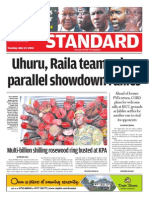
- The Standard 27.05.2014Документ80 страницThe Standard 27.05.2014Zachary Monroe0% (1)
- Petitioners vs. vs. Respondents Cabanlas, Resma & Cabanlas Law Offices Jaime Y SindiongДокумент8 страницPetitioners vs. vs. Respondents Cabanlas, Resma & Cabanlas Law Offices Jaime Y SindiongKate SchuОценок пока нет
- Rules of Beach KabaddiДокумент10 страницRules of Beach KabaddiAnonymous MQjBLReGmXОценок пока нет
- Important Constitutional and Legal Provisions For Women in IndiaДокумент9 страницImportant Constitutional and Legal Provisions For Women in IndiaRahul KumarОценок пока нет
- Ipr Ii Model Answers 2020Документ23 страницыIpr Ii Model Answers 2020ANANDОценок пока нет
- PFR Outline - Atty - Legarda+ayoДокумент35 страницPFR Outline - Atty - Legarda+ayoGabriel Canlas AblolaОценок пока нет
- Ollendorf Vs Abrahamson, 38 Phil. 585Документ7 страницOllendorf Vs Abrahamson, 38 Phil. 585Jane Kirsty PaulineОценок пока нет
- State of Rajasthan v. Union of India (AIR 1977 SC 1361)Документ13 страницState of Rajasthan v. Union of India (AIR 1977 SC 1361)meghakain56% (9)
- Osmena Vs OsmenaДокумент3 страницыOsmena Vs OsmenakimuchosОценок пока нет
- Comparitive Analysis of Contribution of Lawyers in Litigation and Corporate IndustryДокумент15 страницComparitive Analysis of Contribution of Lawyers in Litigation and Corporate IndustrySankalp PariharОценок пока нет
- Role, Cost and Mangement of Hospitality FacilitiesДокумент40 страницRole, Cost and Mangement of Hospitality FacilitiesjessieОценок пока нет
- Criminal Law Book 1 ReviewerДокумент13 страницCriminal Law Book 1 ReviewerBelinda Viernes91% (11)
- Introduction of LawДокумент10 страницIntroduction of LawRaunak PradhanОценок пока нет
- 60 MINUTES - Head of DEA Robert Bonner Says CIA Smuggled DrugsДокумент11 страниц60 MINUTES - Head of DEA Robert Bonner Says CIA Smuggled DrugsChad B HarperОценок пока нет
- George Shuput v. Heublein Inc., A Connecticut Corporation, 511 F.2d 1104, 10th Cir. (1975)Документ4 страницыGeorge Shuput v. Heublein Inc., A Connecticut Corporation, 511 F.2d 1104, 10th Cir. (1975)Scribd Government DocsОценок пока нет
- Aniag v. Comelec (G.R. NO. 104961, October 7, 1994)Документ2 страницыAniag v. Comelec (G.R. NO. 104961, October 7, 1994)Ei BinОценок пока нет
- USA v. Curt Kramer, Mazuma Corporation, Mazuma Funding Corporation, and Mazuma Holding CorporationДокумент5 страницUSA v. Curt Kramer, Mazuma Corporation, Mazuma Funding Corporation, and Mazuma Holding CorporationEnder VogalsОценок пока нет
- Laurel v. CSC (1991) - DigestДокумент3 страницыLaurel v. CSC (1991) - DigestHansel Jake B. Pampilo0% (1)
- Historical Background: I. Torrens System of Land RegistrationДокумент28 страницHistorical Background: I. Torrens System of Land RegistrationRosalia L. Completano LptОценок пока нет
- Bearneza v. DequillaДокумент2 страницыBearneza v. DequillaCamille BritanicoОценок пока нет
- Peta Investigation Into Jallikattu Events 14-28 January 2018: White Paper Required - Abhishek KadyanДокумент131 страницаPeta Investigation Into Jallikattu Events 14-28 January 2018: White Paper Required - Abhishek KadyanNaresh KadyanОценок пока нет
- Sample AffidavitДокумент4 страницыSample AffidavitDanica Esteban100% (1)
- JEFFREY EPSTEIN, Plaintiff, vs. SCOTT ROTHSTEIN, Individually, and BRADLEYJ EDWARDS, IndividuallyДокумент39 страницJEFFREY EPSTEIN, Plaintiff, vs. SCOTT ROTHSTEIN, Individually, and BRADLEYJ EDWARDS, IndividuallySyndicated News100% (14)
- Summary of Shop and Estabilishment ActДокумент11 страницSummary of Shop and Estabilishment ActBirendra MishraОценок пока нет
- Jurisprudence - ContractsДокумент154 страницыJurisprudence - ContractsErwin FunaОценок пока нет
- Code of Ethics For ArchitectureДокумент19 страницCode of Ethics For ArchitectureBing AbellaОценок пока нет
- 187854Документ9 страниц187854The Supreme Court Public Information OfficeОценок пока нет