Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Auto Full Vehicle Durability Using Abaqus Standard 11Документ4 страницыAuto Full Vehicle Durability Using Abaqus Standard 11TimОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- NAVFAC-DM-7.2 Foundation & Earth Structure PDFДокумент280 страницNAVFAC-DM-7.2 Foundation & Earth Structure PDFFauzankalibata100% (1)
- Isco Catalog - PDF HDPEДокумент252 страницыIsco Catalog - PDF HDPEWilliam Raúl0% (1)
- Instructions: This Affidavit Should Be Executed by The PersonДокумент1 страницаInstructions: This Affidavit Should Be Executed by The PersonspcbankingОценок пока нет
- King Standard Detail DrawingДокумент64 страницыKing Standard Detail DrawingTimОценок пока нет
- SWOT Analysis Microtel by WyndhamДокумент10 страницSWOT Analysis Microtel by WyndhamAllyza Krizchelle Rosales BukidОценок пока нет
- Pile Foundation DesignДокумент82 страницыPile Foundation Designcuongnguyen89% (28)
- 70-30-00-918-802-A - Consumable Materials Index For The Engine (Pratt & Whitney)Документ124 страницы70-30-00-918-802-A - Consumable Materials Index For The Engine (Pratt & Whitney)victorОценок пока нет
- General Mathematics 2nd Quarter ExamДокумент3 страницыGeneral Mathematics 2nd Quarter ExamDeped TambayanОценок пока нет
- ch4 Mechanical Properties of Wood PDFДокумент46 страницch4 Mechanical Properties of Wood PDFdan-gabiОценок пока нет
- Angle of Repose ReferenceДокумент21 страницаAngle of Repose ReferenceTimОценок пока нет
- Uop WWW - Kutub.info - 222700031-3414Документ1 страницаUop WWW - Kutub.info - 222700031-3414TimОценок пока нет
- Good Bad UglyДокумент58 страницGood Bad UglyTimОценок пока нет
- Gps 17th 18th Nichols Collection Essay DrbrandtzaegДокумент6 страницGps 17th 18th Nichols Collection Essay DrbrandtzaegTimОценок пока нет
- Uop WWW - Kutub.info - 222700031-3414Документ1 страницаUop WWW - Kutub.info - 222700031-3414TimОценок пока нет
- Home Keys2Документ1 страницаHome Keys2TimОценок пока нет
- How Many Trees Make A Newspaper?: Example ProblemДокумент3 страницыHow Many Trees Make A Newspaper?: Example ProblemTimОценок пока нет
- Financing The American Newspaper in The Twenty-First CenturyДокумент21 страницаFinancing The American Newspaper in The Twenty-First CenturyTimОценок пока нет
- Wairarapa Daily TimesДокумент8 страницWairarapa Daily TimesTimОценок пока нет
- English Tuesday 28th April Oak National Academy PDFДокумент1 страницаEnglish Tuesday 28th April Oak National Academy PDFTimОценок пока нет
- Support Vector Regression For Newspaper /magazine Sales ForecastingДокумент8 страницSupport Vector Regression For Newspaper /magazine Sales ForecastingTimОценок пока нет
- Abaqus ScriptingДокумент7 страницAbaqus ScriptingHarun Alrasyid100% (1)
- ASTM TerminologyДокумент2 страницыASTM TerminologyEyanil SanchezОценок пока нет
- Elastic Plastic MaterialsДокумент49 страницElastic Plastic MaterialsRejita PillaiОценок пока нет
- Two and Three-Dimensional Analyses of Supported Excavations Via Truss (In Farsi)Документ24 страницыTwo and Three-Dimensional Analyses of Supported Excavations Via Truss (In Farsi)TimОценок пока нет
- Abaqus ScriptingДокумент7 страницAbaqus ScriptingHarun Alrasyid100% (1)
- Stress-Accurate Mixed FEM For Soil Failure Under Shallow Foundations Involving Strain Localization in PlasticityДокумент32 страницыStress-Accurate Mixed FEM For Soil Failure Under Shallow Foundations Involving Strain Localization in PlasticityTimОценок пока нет
- KL1508 KL1516: 8/16-Port Cat 5 High-Density Dual Rail LCD KVM SwitchДокумент5 страницKL1508 KL1516: 8/16-Port Cat 5 High-Density Dual Rail LCD KVM SwitchnisarahmedgfecОценок пока нет
- 02Документ257 страниц02shaney navoaОценок пока нет
- Learning Activity Sheet Science 10 Second Quarter - Week 8Документ4 страницыLearning Activity Sheet Science 10 Second Quarter - Week 8Eller Jansen AnciroОценок пока нет
- Hood Design Using NX Cad: HOOD: The Hood Is The Cover of The Engine in The Vehicles With An Engine at Its FrontДокумент3 страницыHood Design Using NX Cad: HOOD: The Hood Is The Cover of The Engine in The Vehicles With An Engine at Its FrontHari TejОценок пока нет
- IMO Special Areas Under MARPOLДокумент2 страницыIMO Special Areas Under MARPOLRavi Viknesh100% (1)
- Tankguard AR: Technical Data SheetДокумент5 страницTankguard AR: Technical Data SheetAzar SKОценок пока нет
- DataBase Management Systems SlidesДокумент64 страницыDataBase Management Systems SlidesMukhesh InturiОценок пока нет
- Kolodin Agreement For Discipline by ConsentДокумент21 страницаKolodin Agreement For Discipline by ConsentJordan ConradsonОценок пока нет
- Energia Eolica Nordex N90 2500 enДокумент20 страницEnergia Eolica Nordex N90 2500 enNardo Antonio Llanos MatusОценок пока нет
- Balanza Pediatrica Health o Meter 549KL Mtto PDFДокумент18 страницBalanza Pediatrica Health o Meter 549KL Mtto PDFFix box Virrey Solís IPSОценок пока нет
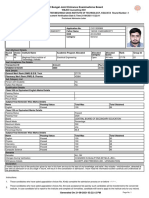
- West Bengal Joint Entrance Examinations Board: Provisional Admission LetterДокумент2 страницыWest Bengal Joint Entrance Examinations Board: Provisional Admission Lettertapas chakrabortyОценок пока нет
- Br2e Int Readingfile10 PDFДокумент2 страницыBr2e Int Readingfile10 PDFSanti RodriguezОценок пока нет
- Capitol Medical Center, Inc. v. NLRCДокумент14 страницCapitol Medical Center, Inc. v. NLRCFidel Rico NiniОценок пока нет
- Current Matching Control System For Multi-Terminal DC Transmission To Integrate Offshore Wind FarmsДокумент6 страницCurrent Matching Control System For Multi-Terminal DC Transmission To Integrate Offshore Wind FarmsJackie ChuОценок пока нет
- T53 L 13 Turboshaft EngineДокумент2 страницыT53 L 13 Turboshaft EngineEagle1968Оценок пока нет
- 1491559890CL 0417 PDFДокумент48 страниц1491559890CL 0417 PDFCoolerAdsОценок пока нет
- Problem SetДокумент61 страницаProblem SetEmily FungОценок пока нет
- RFBT - Law On Sales Cont. Week 11Документ1 страницаRFBT - Law On Sales Cont. Week 11Jennela VeraОценок пока нет
- CH 3 Revision Worksheet 2 Class 6 CSДокумент1 страницаCH 3 Revision Worksheet 2 Class 6 CSShreyank SinghОценок пока нет
- 14 DETEMINANTS & MATRICES PART 3 of 6 PDFДокумент10 страниц14 DETEMINANTS & MATRICES PART 3 of 6 PDFsabhari_ramОценок пока нет
- General Description Product Summery: Bvdss Rdson IDДокумент4 страницыGeneral Description Product Summery: Bvdss Rdson IDJose Angel TorrealbaОценок пока нет
- Grant Miller Resume-ColliersДокумент3 страницыGrant Miller Resume-ColliersDeven GriffinОценок пока нет
- Azure Subscription and Service Limits, Quotas, and ConstraintsДокумент54 страницыAzure Subscription and Service Limits, Quotas, and ConstraintsSorinОценок пока нет
- Application Form New - Erik WitiandikaДокумент6 страницApplication Form New - Erik Witiandikatimmy lauОценок пока нет
- Year Warranty: 1575 - 90 Ave Edmonton, AB Canada T6P 0E2Документ2 страницыYear Warranty: 1575 - 90 Ave Edmonton, AB Canada T6P 0E2juanchingarОценок пока нет
- TIP - IPBT M - E For MentorsДокумент3 страницыTIP - IPBT M - E For Mentorsallan galdianoОценок пока нет