Вам также может понравиться
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiОт EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiОценок пока нет
- Buckling Loads of Columns With Gradually Changing Cross-Section Subjected To Combined Axial LoadingДокумент12 страницBuckling Loads of Columns With Gradually Changing Cross-Section Subjected To Combined Axial LoadingMEER MUSTAFA ALIОценок пока нет
- Buckling Loads of Columns With Gradually Changing Cross-Section Subjected To Combined Axial LoadingДокумент12 страницBuckling Loads of Columns With Gradually Changing Cross-Section Subjected To Combined Axial LoadingDoutor InácioОценок пока нет
- CC111Документ3 страницыCC111Zx̂'SkærОценок пока нет
- s2 1 PDFДокумент3 страницыs2 1 PDFkrishnaОценок пока нет
- Lecture5 09Документ70 страницLecture5 09Sherlcok HolmesОценок пока нет
- CML100 - Quantum Sheet 2 PDFДокумент2 страницыCML100 - Quantum Sheet 2 PDFDivyansh Gupta100% (1)
- Civn3026a L13Документ33 страницыCivn3026a L13ditokelomolabeОценок пока нет
- BS 3Документ58 страницBS 3abhishekОценок пока нет
- One Dimensional Finite CrystalДокумент11 страницOne Dimensional Finite CrystalBayanjargal ErdeneeОценок пока нет
- Lec. 3Документ50 страницLec. 3mustafa alasadyОценок пока нет
- Battiato Gastaldi FEM ReportДокумент39 страницBattiato Gastaldi FEM ReportChiara GastaldiОценок пока нет
- Core 11 Physics 2019Документ4 страницыCore 11 Physics 2019Chinmaya Kumar SahooОценок пока нет
- Section 5Документ16 страницSection 5api-26021617Оценок пока нет
- Identical Particle in Physics QuestionsДокумент8 страницIdentical Particle in Physics QuestionsZisanОценок пока нет
- PPT6 (2) UpdatedДокумент27 страницPPT6 (2) UpdatedAdugnaw BiksОценок пока нет
- 15 Atom HidrogenДокумент42 страницы15 Atom HidrogenRahajengОценок пока нет
- Wave Model - Hydrogen Case - 2023-2024Документ36 страницWave Model - Hydrogen Case - 2023-2024rahmaderradji23Оценок пока нет
- Assignment 3Документ3 страницыAssignment 3SarthakОценок пока нет
- 13 Heisenberg PrincipleДокумент9 страниц13 Heisenberg PrincipleengshimaaОценок пока нет
- BasicQuantumMechanics PDFДокумент43 страницыBasicQuantumMechanics PDFMOHAMMAD ZAINОценок пока нет
- 21 - Mathematics - Conic Section - HyperbolaДокумент20 страниц21 - Mathematics - Conic Section - HyperbolaharshОценок пока нет
- 2023-2024 ProblemSetWeek4Документ3 страницы2023-2024 ProblemSetWeek4popbop67Оценок пока нет
- Input-Output Relations in OpticalДокумент46 страницInput-Output Relations in OpticalLucas RibeiroОценок пока нет
- Classical Mechanics (NETGATE) PDFДокумент30 страницClassical Mechanics (NETGATE) PDFSaley SaeedОценок пока нет
- Robotics1 12.04.26 PDFДокумент6 страницRobotics1 12.04.26 PDFasalifew belachewОценок пока нет
- Gate 2018 PHДокумент7 страницGate 2018 PHPasupuleti AnilОценок пока нет
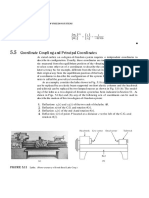
- Principal CoordinatesДокумент6 страницPrincipal CoordinatesDanielОценок пока нет
- Examples Quantum ChemistryДокумент7 страницExamples Quantum ChemistryEnitiОценок пока нет
- NA 1.CurveFittingДокумент12 страницNA 1.CurveFittingDawa PenjorОценок пока нет
- Lecture 3Документ5 страницLecture 3Anurag SОценок пока нет
- Applied Optics: Lecture III-3 Reflection and Refraction of EM-waves at A Plane-Interface Between DielectricsДокумент5 страницApplied Optics: Lecture III-3 Reflection and Refraction of EM-waves at A Plane-Interface Between Dielectricstamania naeemОценок пока нет
- Diq1m w8jrhДокумент10 страницDiq1m w8jrhMohsin MuhammadОценок пока нет
- Department of Physics, IITM: L H P Ur M RДокумент3 страницыDepartment of Physics, IITM: L H P Ur M RMorodirОценок пока нет
- Advanved Quantum Mechanics Exam Freie Universitat BerlinДокумент3 страницыAdvanved Quantum Mechanics Exam Freie Universitat BerlinjuanОценок пока нет
- Buckling of ColumnsДокумент47 страницBuckling of ColumnsMuhamad Khairudin AwangОценок пока нет
- Column - TopangДокумент25 страницColumn - TopangMuhammad syazuwan Ab RahmanОценок пока нет
- WK 11Документ36 страницWK 11Muhammad BilalОценок пока нет
- Acoustics: ACOUSTICS - C9 - 2015 1 Ş.L.DR - Ing.mat. Alina BogoiДокумент31 страницаAcoustics: ACOUSTICS - C9 - 2015 1 Ş.L.DR - Ing.mat. Alina BogoiDenysadenisaОценок пока нет
- Diklic TNSДокумент17 страницDiklic TNSJosipa DiklićОценок пока нет
- Question Bank M.Sc. - PHYSICS (Previous) Quantum Mechanics MPH-03Документ7 страницQuestion Bank M.Sc. - PHYSICS (Previous) Quantum Mechanics MPH-03Manoj SaranОценок пока нет
- Csir-Ugc-Net/Jrf - Gate - Physics: V X That Satisfies The Condition (V X VXДокумент4 страницыCsir-Ugc-Net/Jrf - Gate - Physics: V X That Satisfies The Condition (V X VXAbhrajit MahapatraОценок пока нет
- Ficha 3ro Cyt 2Документ32 страницыFicha 3ro Cyt 2Esika ArequipaОценок пока нет
- Mohr's CircleДокумент37 страницMohr's CircleMukhtiar Ahmed LakhanОценок пока нет
- Solution To Exercise 2.1-1 Free Electron Gas With Constant Boundary ConditionsДокумент2 страницыSolution To Exercise 2.1-1 Free Electron Gas With Constant Boundary Conditionsjustinl1375535Оценок пока нет
- Fialowski DeformationsLieAlgebras MathUSSRSbor PDFДокумент8 страницFialowski DeformationsLieAlgebras MathUSSRSbor PDFhelmantico1970Оценок пока нет
- Central Potential: Another Important Problem in Quantum Mechanics Is The Central Potential ProblemДокумент20 страницCentral Potential: Another Important Problem in Quantum Mechanics Is The Central Potential Problemabdul rehmanОценок пока нет
- PHY 102: Quantum Physics: Topic 4 Introduction To Quantum TheoryДокумент24 страницыPHY 102: Quantum Physics: Topic 4 Introduction To Quantum TheorySuhardi EffendyОценок пока нет
- Exam3 PDFДокумент2 страницыExam3 PDFlookyoursoulОценок пока нет
- Co-Ordinate Geometry: 2 Change of AxesДокумент22 страницыCo-Ordinate Geometry: 2 Change of AxesPrantoОценок пока нет
- This Study Resource Was: Flutter Analysis of A 2-DOF SystemДокумент8 страницThis Study Resource Was: Flutter Analysis of A 2-DOF Systemmahdi ShamsОценок пока нет
- Chapter 11. Angular Momentum: General TheoryДокумент32 страницыChapter 11. Angular Momentum: General TheoryATP_101Оценок пока нет
- Coulomb LawДокумент3 страницыCoulomb LawJohn KolmaОценок пока нет
- Topological Structures of Möbius-Strip Fermions and Simple-Loop Bosons As The Fundamental Massless Quantum Field Excitations in 2D SpacetimeДокумент22 страницыTopological Structures of Möbius-Strip Fermions and Simple-Loop Bosons As The Fundamental Massless Quantum Field Excitations in 2D SpacetimeMephistoОценок пока нет
- Tutorial QuestionsДокумент3 страницыTutorial QuestionsAbiola OgundejiОценок пока нет
- The DC Power Flow EquationsДокумент25 страницThe DC Power Flow EquationsDaryAntoОценок пока нет
- Important Notes On Lyapunov Exponents: January 2014Документ19 страницImportant Notes On Lyapunov Exponents: January 2014Oprea RebecaОценок пока нет
- Explicit Density Functionals For The Kinetic Energy: Thomas-Fermi Models and BeyondДокумент7 страницExplicit Density Functionals For The Kinetic Energy: Thomas-Fermi Models and BeyondVirgilio QuaresimaОценок пока нет
- Theory of Circular (Cylindrical) Waveguides: Bessel Equations and Bessel FunctionsДокумент11 страницTheory of Circular (Cylindrical) Waveguides: Bessel Equations and Bessel FunctionsKamran RaziОценок пока нет
- Jest Physics 2018 Paper PDFДокумент9 страницJest Physics 2018 Paper PDFSatyaki ChowdhuryОценок пока нет
- Sample Questions and Answers On The Code of Professional ConductДокумент10 страницSample Questions and Answers On The Code of Professional Conductjiwa remajaОценок пока нет
- Chemical Oxygen Demand COD PDFДокумент7 страницChemical Oxygen Demand COD PDFjiwa remajaОценок пока нет
- Receiver Function Study in Northern Sumatra and The Malaysian PeninsulaДокумент24 страницыReceiver Function Study in Northern Sumatra and The Malaysian Peninsulajiwa remajaОценок пока нет
- Seismic Impact in Peninsula MalaysiaДокумент6 страницSeismic Impact in Peninsula Malaysiajiwa remajaОценок пока нет
- Week 13 Function ProjectДокумент23 страницыWeek 13 Function Projectjiwa remajaОценок пока нет
- Forces in TrussДокумент16 страницForces in Trussjiwa remaja100% (1)
- Assignment 2 (Co3co4)Документ4 страницыAssignment 2 (Co3co4)jiwa remajaОценок пока нет
- Assignment 2 (Co3co4)Документ4 страницыAssignment 2 (Co3co4)jiwa remajaОценок пока нет
- Shear Force Influence LineДокумент18 страницShear Force Influence Linejiwa remajaОценок пока нет
- Forces in Redundant Truss and Forces in TrussДокумент28 страницForces in Redundant Truss and Forces in Trussjiwa remajaОценок пока нет
- Forces in Redundant Truss / Forces in TrussДокумент37 страницForces in Redundant Truss / Forces in Trussjiwa remajaОценок пока нет
- Dow 036a-Variation Order Format Nov 2011Документ4 страницыDow 036a-Variation Order Format Nov 2011jiwa remajaОценок пока нет
- SubstructureДокумент5 страницSubstructurejiwa remajaОценок пока нет
- (SPN) On J1939 Data LinkДокумент107 страниц(SPN) On J1939 Data LinkAM76Оценок пока нет
- 19C Financials WNДокумент60 страниц19C Financials WNbishwabengalitolaОценок пока нет
- Octopus 900 Instructions For UseДокумент18 страницOctopus 900 Instructions For UseAli FadhilОценок пока нет
- Gist of FIEO ServicesДокумент1 страницаGist of FIEO Servicessanjay patraОценок пока нет
- Summary Studying Public Policy Michael Howlett CompleteДокумент28 страницSummary Studying Public Policy Michael Howlett CompletefadwaОценок пока нет
- Odontogenic CystsДокумент5 страницOdontogenic CystsBH ASMRОценок пока нет
- Emergency Communication Procedures Communication Equipment Wake TurbulenceДокумент38 страницEmergency Communication Procedures Communication Equipment Wake TurbulenceRaluca StoicaОценок пока нет
- Metabolic SyndromeДокумент4 страницыMetabolic SyndromeNurayunie Abd HalimОценок пока нет
- Modeling Cover Letter No ExperienceДокумент7 страницModeling Cover Letter No Experienceimpalayhf100% (1)
- Indian Ordnance FactoryДокумент2 страницыIndian Ordnance FactoryAniket ChakiОценок пока нет
- Management by ObjectivesДокумент30 страницManagement by ObjectivesJasmandeep brar100% (4)
- Baterías YuasaДокумент122 страницыBaterías YuasaLuisОценок пока нет
- Tech Bee JavaДокумент57 страницTech Bee JavaA KarthikОценок пока нет
- CasesДокумент4 страницыCasesSheldonОценок пока нет
- Lenovo Security ThinkShield-Solutions-Guide Ebook IDG NA HV DownloadДокумент10 страницLenovo Security ThinkShield-Solutions-Guide Ebook IDG NA HV DownloadManeshОценок пока нет
- 11 - Savulescu Et Al (2020) - Equality or Utility. Ethics and Law of Rationing VentilatorsДокумент6 страниц11 - Savulescu Et Al (2020) - Equality or Utility. Ethics and Law of Rationing VentilatorsCorrado BisottoОценок пока нет
- Di MCB DB Pricelist01!07!2018Документ1 страницаDi MCB DB Pricelist01!07!2018saurabhjerps231221Оценок пока нет
- Human Resource Management - Introduction - A Revision Article - A Knol by Narayana RaoДокумент7 страницHuman Resource Management - Introduction - A Revision Article - A Knol by Narayana RaoHimanshu ShuklaОценок пока нет
- 1 Introduction To Pharmaceutical Dosage Forms Part1Документ32 страницы1 Introduction To Pharmaceutical Dosage Forms Part1Joanna Carla Marmonejo Estorninos-Walker100% (1)
- Point of View Task CardsДокумент7 страницPoint of View Task Cardsapi-660227300Оценок пока нет
- List of Newly and Migrated Programs For September 2022 - WebsiteДокумент21 страницаList of Newly and Migrated Programs For September 2022 - WebsiteRMG REPAIRОценок пока нет
- Part List SR-DVM70AG, SR-DVM70EUДокумент28 страницPart List SR-DVM70AG, SR-DVM70EUAndrea BarbadoroОценок пока нет
- DSP Unit V ObjectiveДокумент4 страницыDSP Unit V Objectiveshashi dharОценок пока нет
- Mysuru Royal Institute of Technology. Mandya: Question Bank-1Документ2 страницыMysuru Royal Institute of Technology. Mandya: Question Bank-1chaitragowda213_4732Оценок пока нет
- Man 3Документ38 страницMan 3Paylo KatolykОценок пока нет
- Profile Romblon IslandДокумент10 страницProfile Romblon Islandderella starsОценок пока нет
- Ababio v. R (1972) 1 GLR 347Документ4 страницыAbabio v. R (1972) 1 GLR 347Esinam Adukpo100% (2)
- BreakwatersДокумент15 страницBreakwatershima sagarОценок пока нет
- Nfjpia Mockboard 2011 BLTДокумент12 страницNfjpia Mockboard 2011 BLTVon Wilson AjocОценок пока нет
- 4439 Chap01Документ28 страниц4439 Chap01bouthaina otОценок пока нет
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceОт EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceРейтинг: 4 из 5 звезд4/5 (51)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseОт EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseРейтинг: 3.5 из 5 звезд3.5/5 (69)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyОт EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyОценок пока нет
- A Brief History of Time: From the Big Bang to Black HolesОт EverandA Brief History of Time: From the Big Bang to Black HolesРейтинг: 4 из 5 звезд4/5 (2193)
- Lost in Math: How Beauty Leads Physics AstrayОт EverandLost in Math: How Beauty Leads Physics AstrayРейтинг: 4.5 из 5 звезд4.5/5 (125)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldОт EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldРейтинг: 3.5 из 5 звезд3.5/5 (64)
- Packing for Mars: The Curious Science of Life in the VoidОт EverandPacking for Mars: The Curious Science of Life in the VoidРейтинг: 4 из 5 звезд4/5 (1396)
- Quantum Physics: What Everyone Needs to KnowОт EverandQuantum Physics: What Everyone Needs to KnowРейтинг: 4.5 из 5 звезд4.5/5 (49)
- The Beginning of Infinity: Explanations That Transform the WorldОт EverandThe Beginning of Infinity: Explanations That Transform the WorldРейтинг: 5 из 5 звезд5/5 (60)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldОт EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldРейтинг: 4.5 из 5 звезд4.5/5 (54)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessОт EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessРейтинг: 4 из 5 звезд4/5 (6)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterОт EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterРейтинг: 4.5 из 5 звезд4.5/5 (410)
- The End of Everything: (Astrophysically Speaking)От EverandThe End of Everything: (Astrophysically Speaking)Рейтинг: 4.5 из 5 звезд4.5/5 (157)
- Summary and Interpretation of Reality TransurfingОт EverandSummary and Interpretation of Reality TransurfingРейтинг: 5 из 5 звезд5/5 (5)
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessОт EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessРейтинг: 4.5 из 5 звезд4.5/5 (57)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОт EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Bedeviled: A Shadow History of Demons in ScienceОт EverandBedeviled: A Shadow History of Demons in ScienceРейтинг: 5 из 5 звезд5/5 (5)
- The Illustrated Theory of Everything: The Origin and Fate of the UniverseОт EverandThe Illustrated Theory of Everything: The Origin and Fate of the UniverseРейтинг: 5 из 5 звезд5/5 (1)
- A Natural History of Color: The Science Behind What We See and How We See itОт EverandA Natural History of Color: The Science Behind What We See and How We See itРейтинг: 4 из 5 звезд4/5 (13)
- Transform Your Life And Save The World: Through The Dreamed Of Arrival Of The Rehabilitating Biological Explanation Of The Human ConditionОт EverandTransform Your Life And Save The World: Through The Dreamed Of Arrival Of The Rehabilitating Biological Explanation Of The Human ConditionРейтинг: 5 из 5 звезд5/5 (2)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОт EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОценок пока нет