Вам также может понравиться
- Today's Objectives:: Mass Moment of InertiaДокумент15 страницToday's Objectives:: Mass Moment of InertiaAtef NazОценок пока нет
- Work Power Energy PDFДокумент38 страницWork Power Energy PDFKrizzi Dizon GarciaОценок пока нет
- Brakes Notes PDFДокумент4 страницыBrakes Notes PDFSharmila ShettyОценок пока нет
- Design of ClutchДокумент8 страницDesign of Clutchdnp015Оценок пока нет
- Types of BrakesДокумент12 страницTypes of Brakesذوالفقار علي حسينОценок пока нет
- SolutionsofGears PDFДокумент4 страницыSolutionsofGears PDFGautam AdhikariОценок пока нет
- Brake System Design and Theory PDFДокумент5 страницBrake System Design and Theory PDFal sarОценок пока нет
- Babaria Institute OF Technology: Designed By: Husain Y Malek. E. NO:140050119038 ROLL NO:14ME38Документ28 страницBabaria Institute OF Technology: Designed By: Husain Y Malek. E. NO:140050119038 ROLL NO:14ME38necromancer18Оценок пока нет
- Analysis of Long Shoe BrakesДокумент5 страницAnalysis of Long Shoe BrakesDeepak ChachraОценок пока нет
- Terminology of Helical SpringДокумент4 страницыTerminology of Helical Springsandeep c sОценок пока нет
- Virtual Work and Power BalanceДокумент5 страницVirtual Work and Power BalanceAlessio ScarabelliОценок пока нет
- ZcRcnbHaSOSEXJ2x2sjkQA Chapter5 Plane Kinematics of Rigid Bodies BlankДокумент84 страницыZcRcnbHaSOSEXJ2x2sjkQA Chapter5 Plane Kinematics of Rigid Bodies BlankRaj PatelОценок пока нет
- Brakes, Clutch and CoplingДокумент34 страницыBrakes, Clutch and CoplingBirjesh YaduvanshiОценок пока нет
- Disc Brake Components and OperationДокумент8 страницDisc Brake Components and OperationJhomz BaldrezОценок пока нет
- Design of A ClutchДокумент6 страницDesign of A Clutchsai ganeshОценок пока нет
- What Is Work ? (In Physics)Документ20 страницWhat Is Work ? (In Physics)spreemouseОценок пока нет
- Friction Gravity and Elastic Forces Power PoinДокумент60 страницFriction Gravity and Elastic Forces Power PoinMurniОценок пока нет
- Planar Rigid Body Dynamics: Impulse and MomentumДокумент8 страницPlanar Rigid Body Dynamics: Impulse and MomentumnguyendaibkaОценок пока нет
- ME364-03 Gears GeneralДокумент92 страницыME364-03 Gears GeneralumarОценок пока нет
- Design Procedure of Gear Box For Automobile and Machine ToolsДокумент10 страницDesign Procedure of Gear Box For Automobile and Machine ToolsNAGU20090% (1)
- Eng'Rs Junction: Brake Shoe and Pad FundamentalsДокумент16 страницEng'Rs Junction: Brake Shoe and Pad FundamentalsObsinan BarsanОценок пока нет
- PresentationДокумент13 страницPresentationselva_raj215414Оценок пока нет
- Electric PotentialДокумент41 страницаElectric Potentialbry uyОценок пока нет
- Module 3 With SolutionsДокумент31 страницаModule 3 With SolutionsGovind GauravОценок пока нет
- Impulse and MomentumДокумент12 страницImpulse and Momentumshirley cortezОценок пока нет
- Clutches PDFДокумент45 страницClutches PDFMuhammad Qasim JameelОценок пока нет
- Ch.11 Virtual WorkДокумент2 страницыCh.11 Virtual WorkTanTienNguyenОценок пока нет
- Moment of Inertia PDFДокумент35 страницMoment of Inertia PDFSwarnalatha SwarnalathaОценок пока нет
- Formula Collection For LaminatesДокумент13 страницFormula Collection For LaminatesvincentcalardОценок пока нет
- CLT Explained: Laminate Stiffness & Constitutive RelationsДокумент5 страницCLT Explained: Laminate Stiffness & Constitutive RelationsAlfonso FernandezОценок пока нет
- What Is FrictionДокумент3 страницыWhat Is FrictionJOLLIBEL LLANERAОценок пока нет
- Lecture18 PDFДокумент26 страницLecture18 PDFGökçen Aslan AydemirОценок пока нет
- Clutch PDFДокумент20 страницClutch PDFClaudio Godoy GallegosОценок пока нет
- Springs NotesДокумент12 страницSprings NotesKeith Tanaka MagakaОценок пока нет
- Variational Principles and Lagrange's EquationsДокумент102 страницыVariational Principles and Lagrange's EquationsMona AliОценок пока нет
- Part 5 MT Drives and Mechanisms 1Документ11 страницPart 5 MT Drives and Mechanisms 1Anonymous YaJlLHYОценок пока нет
- Disc Brakes ReportДокумент3 страницыDisc Brakes ReportÁkshárâ ÀstérikОценок пока нет
- Chain Drive PDFДокумент3 страницыChain Drive PDFNitin SharmaОценок пока нет
- Analytical Dynamics: Lagrange's Equation and Its Application - A Brief IntroductionДокумент23 страницыAnalytical Dynamics: Lagrange's Equation and Its Application - A Brief IntroductionLisaОценок пока нет
- Lecture 4 - Design For Variable LoadingДокумент37 страницLecture 4 - Design For Variable LoadingHafiz AbdulRehmanОценок пока нет
- Classical 6Документ10 страницClassical 6AlexeiОценок пока нет
- Assignment 2: 1 Marion and Thornton Chapter 7Документ7 страницAssignment 2: 1 Marion and Thornton Chapter 7Benjamin MullenОценок пока нет
- Hamilton's principle and Lagrange equations: Deriving equations of motion using variational principlesДокумент8 страницHamilton's principle and Lagrange equations: Deriving equations of motion using variational principlesletter_ashish4444Оценок пока нет
- PHD Lecture16Документ8 страницPHD Lecture16Roy VeseyОценок пока нет
- Clutches Kul 3 PDFДокумент39 страницClutches Kul 3 PDFRudy ArthaОценок пока нет
- Couplings in MechatronicsДокумент23 страницыCouplings in MechatronicsRavindra MahadeokarОценок пока нет
- CH 3Документ22 страницыCH 3zijun yuОценок пока нет
- Lecture No.01 Polymer EngineeringДокумент16 страницLecture No.01 Polymer Engineeringmm11_nedОценок пока нет
- Design of ClutchesДокумент37 страницDesign of ClutchesRintu MazumderОценок пока нет
- Brakes and Clutches: References: Norton, Shigley & Orlov Andrei LozziДокумент16 страницBrakes and Clutches: References: Norton, Shigley & Orlov Andrei LozziRogelioB.AlobIIОценок пока нет
- CATALOGUEДокумент12 страницCATALOGUERajeshОценок пока нет
- Cylinder-Head Bolts and Cylinder-Head Installation: Tips and Practical Information No. 2Документ7 страницCylinder-Head Bolts and Cylinder-Head Installation: Tips and Practical Information No. 2Sava SergiuОценок пока нет
- Fundamentals of Vehicle Tire MechanicsДокумент5 страницFundamentals of Vehicle Tire MechanicsNavid HmtiОценок пока нет
- Clutch CB PDFДокумент45 страницClutch CB PDFLuis Eduardo Albarracin RugelesОценок пока нет
- Nonlinear Bingham Model of A Magnetorheological Shock AbsorberДокумент4 страницыNonlinear Bingham Model of A Magnetorheological Shock Absorbershivangar.bali.ukОценок пока нет
- Power Transmission of A Over Rated PowerДокумент8 страницPower Transmission of A Over Rated PowerAshwary Sheel Wali Research Scholar, Dept of Mech Engg., IIT (BHU)Оценок пока нет
- IITJEE Main Unit Wise Practice Tests For IIT JEE Physics From CP Publication 10 Unit Tests 2 Revision 1 Full Syllabus Test Career Point Kota PDFДокумент145 страницIITJEE Main Unit Wise Practice Tests For IIT JEE Physics From CP Publication 10 Unit Tests 2 Revision 1 Full Syllabus Test Career Point Kota PDFsridevi100% (1)
- 11th STD Maths - Volume2 - Full Book - 11-08-2018 PDFДокумент288 страниц11th STD Maths - Volume2 - Full Book - 11-08-2018 PDFmuraliОценок пока нет
- ORGANIC NamingДокумент15 страницORGANIC Namingapi-3835692100% (2)
- Chemistry Notes for Class 12 Chapter 15 PolymersДокумент17 страницChemistry Notes for Class 12 Chapter 15 PolymersAsifОценок пока нет
- Bansal Classes 11th Standard Physics DPPsДокумент148 страницBansal Classes 11th Standard Physics DPPsAnilKumar Jupalli100% (2)
- CBSE Class 12 Chemistry - Polymers AssignmentДокумент5 страницCBSE Class 12 Chemistry - Polymers AssignmentsrideviОценок пока нет
- Nomenclature Bansal Iit Jee Organic PDFДокумент24 страницыNomenclature Bansal Iit Jee Organic PDFa143deendayal0% (2)
- Formula Writing and NomenclatureДокумент20 страницFormula Writing and NomenclatureLibAmauОценок пока нет
- Functional Groups of HydrocarbonsДокумент22 страницыFunctional Groups of HydrocarbonsMalvin Roix OrenseОценок пока нет
- 12 Chemistry Notes Ch04 Chemical KineticsДокумент4 страницы12 Chemistry Notes Ch04 Chemical KineticssrideviОценок пока нет
- 14 BiomoleculesДокумент16 страниц14 BiomoleculessrideviОценок пока нет
- Alcohols Phenols Ethers My NotesДокумент63 страницыAlcohols Phenols Ethers My NotessrideviОценок пока нет
- Chapter: 8 The D and F Block Elements: Points To Be RememberedДокумент8 страницChapter: 8 The D and F Block Elements: Points To Be RememberedsrideviОценок пока нет
- 9 Maths Ncert Chapter 15 PDFДокумент15 страниц9 Maths Ncert Chapter 15 PDFsrideviОценок пока нет
- 9 Maths NcertSolutions Chapter 15 1Документ6 страниц9 Maths NcertSolutions Chapter 15 1srideviОценок пока нет
- The P Block ElementsДокумент21 страницаThe P Block ElementssrideviОценок пока нет
- Production of alternative fuel using gasificationДокумент3 страницыProduction of alternative fuel using gasificationsrideviОценок пока нет
- Contemporary Issue in HRDДокумент5 страницContemporary Issue in HRDsridevi100% (1)
- Class XII - Math Chapter: Differential EquationsДокумент2 страницыClass XII - Math Chapter: Differential Equationsakbisoi1Оценок пока нет
- Neptel - Design of Brakes-1Документ9 страницNeptel - Design of Brakes-1srideviОценок пока нет
- Nonlinear Dynamic Response of Elastic Slider-Crank MechanismДокумент12 страницNonlinear Dynamic Response of Elastic Slider-Crank MechanismsrideviОценок пока нет
- Simplified DC Motor LTspiceДокумент18 страницSimplified DC Motor LTspice堀米 毅100% (1)
- Modbus Mapping - Apex 100Документ24 страницыModbus Mapping - Apex 100AnandSreeОценок пока нет
- Kinematic Standing CyclingДокумент15 страницKinematic Standing Cyclingb.avilla9408Оценок пока нет
- Motion & Time DPP Class 7 PhysicsДокумент2 страницыMotion & Time DPP Class 7 PhysicsRiya PatelОценок пока нет
- Replacement in Anticipation of Failure.Документ11 страницReplacement in Anticipation of Failure.mbapritiОценок пока нет
- Formula Sheet chp18-22Документ20 страницFormula Sheet chp18-22remodsouza832Оценок пока нет
- Cebora Bravo 155 CombiДокумент3 страницыCebora Bravo 155 CombiAdiОценок пока нет
- Semi Detailed Lesson Plan in Electricity g71Документ6 страницSemi Detailed Lesson Plan in Electricity g71Edessa MasinasОценок пока нет
- Stray InductanceДокумент8 страницStray InductanceAmirОценок пока нет
- As GCE Physics A 2823 01 June 2006 Question PaperДокумент12 страницAs GCE Physics A 2823 01 June 2006 Question PaperMitul KaziОценок пока нет
- Physics 2 Week 3Документ3 страницыPhysics 2 Week 3senpai notice meОценок пока нет
- Chapter 4 Bearings PDFДокумент50 страницChapter 4 Bearings PDFAnonymous 7aN0oYUm7vОценок пока нет
- 2 and 4 Pole Residual Current Devices (Rccbs/Elcbs) : See Page T.21 - T.22 Sensitivity Current Pack Pack I N Qty. QtyДокумент3 страницы2 and 4 Pole Residual Current Devices (Rccbs/Elcbs) : See Page T.21 - T.22 Sensitivity Current Pack Pack I N Qty. QtyLUATОценок пока нет
- Contact Data Tables: Relay and Timer SpecificationsДокумент1 страницаContact Data Tables: Relay and Timer SpecificationsArif KhanОценок пока нет
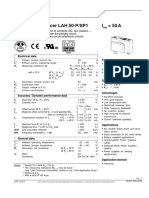
- Lah 50-P-SP1Документ3 страницыLah 50-P-SP1thanggimme.phanОценок пока нет
- Students' Misconceptions in Intro PhysicsДокумент6 страницStudents' Misconceptions in Intro PhysicsChris_Barber09Оценок пока нет
- Comparison of Volt and Curr SourceДокумент6 страницComparison of Volt and Curr Sourcessp303Оценок пока нет
- TIH 025-030 Bearing HeatermanualДокумент106 страницTIH 025-030 Bearing HeatermanualcoupercouperОценок пока нет
- Important Questions From Power ElectronicsДокумент2 страницыImportant Questions From Power ElectronicssirishaОценок пока нет
- PHYSICS FORM 5 CHAPTER 1 WAVES AND ELECTRICITYДокумент4 страницыPHYSICS FORM 5 CHAPTER 1 WAVES AND ELECTRICITYsyeddnОценок пока нет
- Stability of A Rectangular Pontoon PDFДокумент9 страницStability of A Rectangular Pontoon PDFRanu GamesОценок пока нет
- Practical Design Buck Converter GuideДокумент97 страницPractical Design Buck Converter GuideFahim KhanzadaОценок пока нет
- Aakash Rank Booster Test Series For NEET-2020Документ17 страницAakash Rank Booster Test Series For NEET-2020kavyareddyОценок пока нет
- Comparison XGSLab Vs CDEGS 2015 05Документ7 страницComparison XGSLab Vs CDEGS 2015 05EshanОценок пока нет
- Windrock FFTДокумент67 страницWindrock FFTEdwin Casadiego Avila100% (1)
- Dynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionДокумент41 страницаDynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionJJ Enzon100% (1)
- Cubic block force calculations inclined planeДокумент14 страницCubic block force calculations inclined planevenkateswaranОценок пока нет
- MOCK-CET PHYSICS PAPER-1 REVIEWДокумент10 страницMOCK-CET PHYSICS PAPER-1 REVIEWRohan G (Simplinovus)Оценок пока нет
- Universal Law of Gravitation WorksheetДокумент2 страницыUniversal Law of Gravitation WorksheetScionОценок пока нет
- Al-Balqa Applied University Power Systems Protection Course Overcurrent Relay SettingsДокумент37 страницAl-Balqa Applied University Power Systems Protection Course Overcurrent Relay SettingsNitesh KumarОценок пока нет